MS50全站掃描儀性能研究
2015-03-30 03:37:54朱曉康鄒進貴
測繪通報 2015年1期
關(guān)鍵詞:測量
朱曉康,鄒進貴
(武漢大學(xué)測繪學(xué)院,湖北 武漢430079)
一、引 言
2014年6月,瑞士徠卡公司推出的MS50全站掃描儀在中國大陸發(fā)布。MS50全站掃描儀是一款技術(shù)先進、功能全面的新型測繪儀器,它集智能全站儀技術(shù)、超站儀測量技術(shù)、數(shù)字圖像測量技術(shù)以及3D點云掃描測量技術(shù)等于一身,快速高效地獲取高精度的測量成果。由于MS50具有精度高、功能全、操作簡單等優(yōu)點,一經(jīng)推出,便受到各行各業(yè)的青睞。
MS50的測量數(shù)據(jù)同樣會受到各種誤差的影響,而且這些誤差來源眾多,影響程度各不相同。只有對MS50的各項性能進行充分測試,建立誤差模型并進行分析,盡可能消除或削弱各項誤差的影響,才能系統(tǒng)地對MS50的性能指標作出評價,獲得高質(zhì)量的測量成果。
二、MS50測量新技術(shù)
1.WFD測距技術(shù)
MS50測距采用全新的波形數(shù)字化技術(shù),即WFD測距技術(shù)。WFD測距技術(shù)是一種特殊的脈沖法測距,綜合了脈沖法測距與相位法測距的優(yōu)點,具有速度快、光斑小、精度高、范圍大的特點,配合GPH1P棱鏡的測程可以達到10 000 m,單次測距精度為±(1 mm+1.5×10-6D),免棱鏡的測程最遠可以達到2000 m,單次測距精度為±(2 mm+2×10-6D)。
2.點云掃描測量技術(shù)
點云掃描是MS50的最顯著功能。與傳統(tǒng)掃描儀的面掃描不同,MS50利用快速旋轉(zhuǎn)的垂直軸實現(xiàn)線掃描,然后利用水平驅(qū)動進行旋轉(zhuǎn),因此掃描速度主要取決于目標的寬度和橫向分辨率。MS50提供4種掃描模式(見表1),最遠測程可達1000 m,在300 m內(nèi)的掃描速度高達1000點/s,低于傳統(tǒng)三維激光掃描儀,但在掃描距離、點位密度和掃描精度等方面比傳統(tǒng)掃描儀有大幅提高,因此,MS50可以高效獲取高密度、高精度的三維點云數(shù)據(jù)。
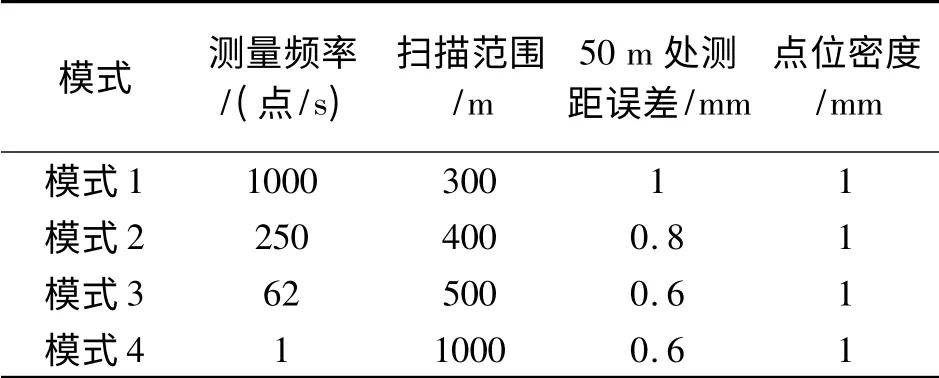
表1 MS50全站掃描儀掃描測量參數(shù)表
MS50是基于全站儀設(shè)站定向的方法進行掃描的,點云數(shù)據(jù)已經(jīng)統(tǒng)一到同一獨立坐標系,因此MS50既可以和傳統(tǒng)三維激光掃描儀一樣基于公共點最小二乘轉(zhuǎn)換模型實現(xiàn)點云拼接,也可以采用先控制測量后設(shè)站定向的方法進行拼接。
3.ATR自動照準技術(shù)
MS50的自動照準功能采用先進的ATR技術(shù),由照準紅外發(fā)光管自主發(fā)射一紅外光束,然后被同軸投影在望遠鏡上,從物鏡發(fā)射出去后,經(jīng)目標棱鏡反射并由內(nèi)置CCD相機接收,然后通過圖像識別與處理實現(xiàn)目標棱鏡的快速精確照準。MS50的ATR模式測程可達1 km,1 km時測距精度是±1 mm,測角精度為1″。在工程測量中,ATR配合MS50的EGL導(dǎo)向光裝置和鎖定跟蹤裝置可以快速定位目標,在施工放樣時尤為方便。
4.圖像測量技術(shù)
MS50通過500萬像素廣角相機和望遠鏡相機,可以實時高效獲取觀測目標的高清影像。廣角相機的對角視場為19.4°,可用于粗略照準、定義規(guī)劃掃描區(qū)域及拍攝全景圖,而望遠鏡相機的視場僅為1.5°,可實現(xiàn)快速精確照準。在高度角超過35°時,對于傳統(tǒng)全站儀,測量員很難準確地選取目標,只能通過彎管目鏡來選取目標,但MS50的相機功能可以把目鏡的視場同步顯示在顯示屏上,并可以放大縮小,以供測量員快速準確選取目標。
三、測角測距精度測試
1.一測回水平方向標準差的測試
一測回水平方向標準差是指全站儀用盤左和盤右觀測同一目標所求得的水平方向值的準確度,是衡量全站儀測角質(zhì)量高低的重要標志。MS50水平角的標稱精度為0.5″,本文通過多測回多目標法對其進行檢測,同時給出由觀測值計算一測回水平方向標準差的計算模型,最終用測試所得的標準差與標稱精度進行比較判斷儀器是否達到標稱值。
(1)方案實施
本試驗包括自動照準和人工照準兩種模式,每種模式觀測4個序列,每個序列在不同的觀測條件下進行,但觀測條件能夠保證正常的觀測進行。在一個序列中,設(shè)立5個觀測目標(見圖1),盤左、盤右觀測3個測回,每個目標距離測站大約100 m,要求目標與儀器近似水平,且每兩個相鄰目標與儀器所成的夾角近似相等。

圖1 觀測目標分布示意圖
1)自動照準模式按照試驗要求設(shè)立測站和目標,并把MS50和PDA通過藍牙連接,利用“多測回測角”軟件的學(xué)習(xí)測量通過方向觀測法對目標1、2、3、4、5按順時針方向依次觀測,最后回到起始方向A進行歸零。然后在PDA上設(shè)置3個測回,儀器便跟隨學(xué)習(xí)測量的模式自動觀測目標并記錄數(shù)據(jù)。觀測結(jié)束后,軟件會對觀測數(shù)據(jù)進行計算,并檢核各個限差是否超限。按照同樣的方式,在不同的觀測條件下對目標進行另外3個序列的觀測。
2)人工照準模式設(shè)立測站和目標后,通過方向觀測法對目標1、2、3、4、5、1觀測3個測回并記錄數(shù)據(jù),每次觀測時保證十字絲切準棱鏡中心。
(2)計算模型
本文設(shè)計了一種適用于多測回多目標法的一測回水平方向標準差計算模型:
用m(m=1,2,3,4)來表示檢定序列數(shù),用i(i=1,2,3,4,5)來表示觀測目標,用j(j=1,2,3)來表示測回數(shù),那么每個目標的方向值可用rij來表示。
對同一檢定序列,各目標相對目標1歸零后,得到第i個目標各測回的方向平均值為

則同一目標各測回歸零后的觀測值與該目標3個測回的方向平均值之差為

則同一測回各方向的偏差平均值為

因此,各測回各方向的殘差為

第m個檢定序列的殘差平方和為

每一個檢定序列多余觀測值為

則一序列一測回水平方向標準差為

因此,一測回水平方向標準差由4個序列取幾何中數(shù),即
(3)結(jié)果分析
對于兩種照準模式的觀測數(shù)據(jù),以其中一個序列為例,利用上述計算模型對觀測數(shù)據(jù)進行處理和分析,結(jié)果見表2。
根據(jù)上述計算模型計算得該序列一測回水平方向標準差

同理可得人工照準第2序列、第3序列、第4序列的標準差依次為


表2 人工照準第一序列觀測數(shù)據(jù)表
由此可以得到人工照準時一測回水平方向標準差為
同理計算自動照準時各序列標準差依次為
由此可以得到自動照準時一測回水平方向標準差為
通過以上計算結(jié)果可以得知:
1)無論是自動照準還是人工照準,測試得出的MS50全站掃描儀一測回水平方向標準差都在1″的標稱精度之內(nèi),符合儀器廠家的標稱值。
2)對比自動照準和人工照準的每一序列的數(shù)據(jù)以及4個序列綜合的數(shù)據(jù),發(fā)現(xiàn)兩種模式精度差別不大,由此可見,MS50的ATR自動照準功能相當可靠。
2.測距加常數(shù)測試
(1)六段法測試基本原理
六段解析法是一種不需要預(yù)先知道測線的精確長度而采用電磁波測距儀本身的測量成果通過平差計算求定加常數(shù)的方法。基本做法是設(shè)置一條直線,將其分為d1,d2,…,dn等n個線段,如圖2所示。

圖2 六段解析法示意圖
由于

可得
對式(15)進行微分,換成中誤差表達式,得

從式(16)可以看出,段數(shù)n的設(shè)定由測定C的精度要求來決定。通常要求加常數(shù)C的中誤差mc不大于該儀器測距中誤差md的1/2,取mc=0.5 md,代入解得n=6.5。因此分為6~7段,一般選6段。這就是六段法的基本原理。
(2)基線解算模型
采用六段解析法,用MS50全站掃描儀對21段距離進行全組合測量,獲得21個觀測值。由于觀測值已經(jīng)進行過氣象改正,且乘常數(shù)按比例隱含在每段觀測距離中對加常數(shù)沒有影響,因此只需對21個觀測值進行最小二乘平差解算求得六段距離真值以及儀器加常數(shù)。
設(shè)D01~D56為21段距離觀測值,D'01~D'56為基線實際值,v01~v06為距離改正數(shù),取0號點到其他6點的實際值為X1、X2、X3、X4、X5、X6,以及加常數(shù)K作為待估參數(shù),則建立觀測方程為

誤差方程為
列立并解算法方程式,求得X1、X2、X3、X4、X5、X6、K的值和MS50距離測量單位權(quán)中誤差。
(3)觀測數(shù)據(jù)及結(jié)果分析
由于MS50全站掃描儀儀器內(nèi)部植入了氣象改正程序,所以只需在觀測之前輸入所在觀測環(huán)境的氣象因子,即可直接讀取21段氣象改正后的距離。觀測數(shù)據(jù)見表3。
把觀測數(shù)據(jù)代入基線解算模型,解得
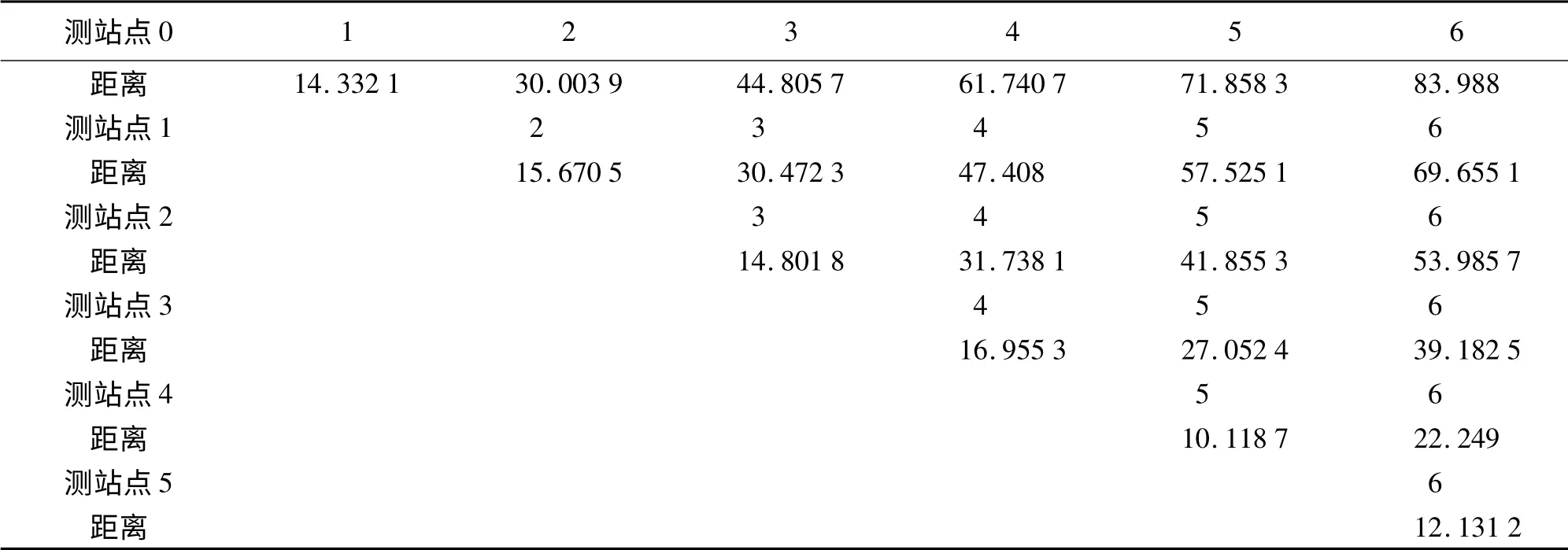
表3 六段法距離觀測數(shù)據(jù)表

進一步計算可得,MS50全站掃描儀距離測量單位權(quán)中誤差為

加常數(shù)測定中誤差為

由此可知,MS50全站掃描儀的儀器加常數(shù)為-0.4 mm,測距中誤差為±0.6 mm,小于儀器的標稱測距精度。
四、掃描性能測試
利用MS50全站掃描儀在測站點對8個相同目標進行掃描,然后將掃描坐標與基準坐標進行對比分析,通過最小二乘平差解算出點位平均偏差,以此來評價掃描精度。將3個測站點的掃描坐標進行互相比較,通過最小二乘平差解算出點位平均偏差,以此來評價拼接效果。
1.方案實施
為了減小中誤差對點位精度的影響,本試驗在武漢大學(xué)測繪學(xué)院頂樓選擇4個強制對中墩(TPS1、TPS2、TPS3、TPS4)作為控制點,在教學(xué)實驗大樓和測繪學(xué)院頂樓無規(guī)律地布設(shè)8個平面標靶(1、2、3、4、5、6、7、8)作為目標點。
1)在控制點TPS1—TPS4上依次架設(shè)儀器,在其余3個控制點上架設(shè)棱鏡,利用方向觀測法對目標棱鏡依次進行兩個測回的觀測。然后利用GNPS軟件對觀測數(shù)據(jù)進行平差,得到每個控制點平差后的坐標值,如表4所示。

表4 平差前、后控制點坐標
2)在控制點TPS1—TPS4上依次架設(shè)儀器,分別對平面標靶進行免棱鏡觀測,盤左、盤右兩個測回,然后利用GNPS軟件進行平差,作為平面標靶中心的基準坐標值,如表5所示。
3)在控制點TPS1—TPS4上依次架設(shè)儀器,分別對平面標靶(1、2、3、4、5、6、7、8)進行掃描,然后利用Cyclone軟件中的平均值法對平面標靶進行擬合,提取標靶中心坐標。以TPS1為例,擬合中心坐標如表6所示。
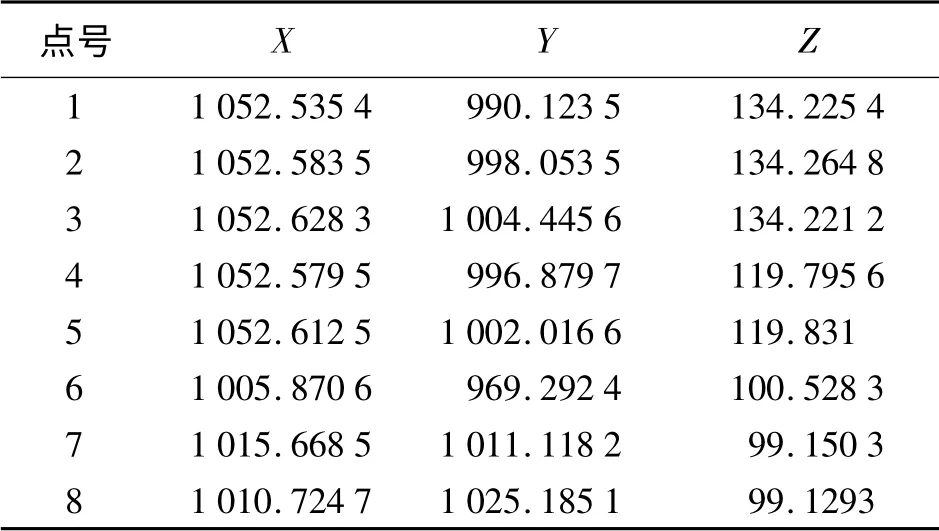
表5 MS50免棱鏡模式基準坐標
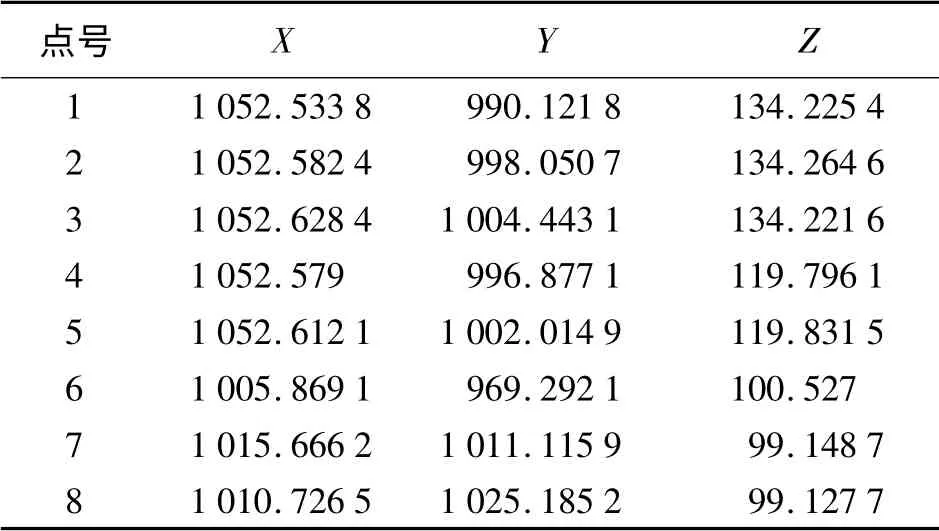
表6 MS50掃描模式擬合中心坐標(TPS1)
2.數(shù)據(jù)分析
1)將TPS1的掃描坐標與基準坐標進行對比分析,點位偏差如表7所示。
由于MS50是基于測站點建立的掃描,掃描坐標和基準坐標屬于同一個坐標系,因此無須進行坐標轉(zhuǎn)換,8個目標點全部參與檢核,計算得MS50全站掃描儀點位平均偏差為
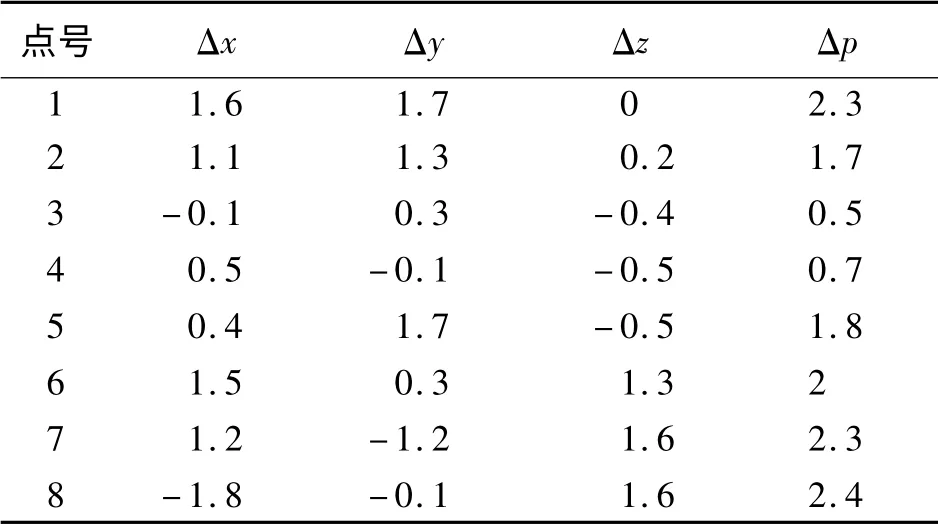
表7 掃描坐標與基準坐標點位偏差匯總表 mm

由以上結(jié)果可知,與基準坐標進行比較時,MS50全站掃描儀的點位平均偏差為1 mm,符合儀器標稱掃描精度。
2)MS50是基于全站儀設(shè)站定向的方法進行掃描的,不同測站點的點云數(shù)據(jù)已經(jīng)統(tǒng)一到同一獨立坐標系,無須進行拼接配準,因此可以用MS50在測站點TPS1掃描的標靶中心坐標與TPS3、TPS4掃描的標靶中心坐標的點位平均偏差衡量拼接精度。各分量的點位偏差匯總?cè)绫?所示。
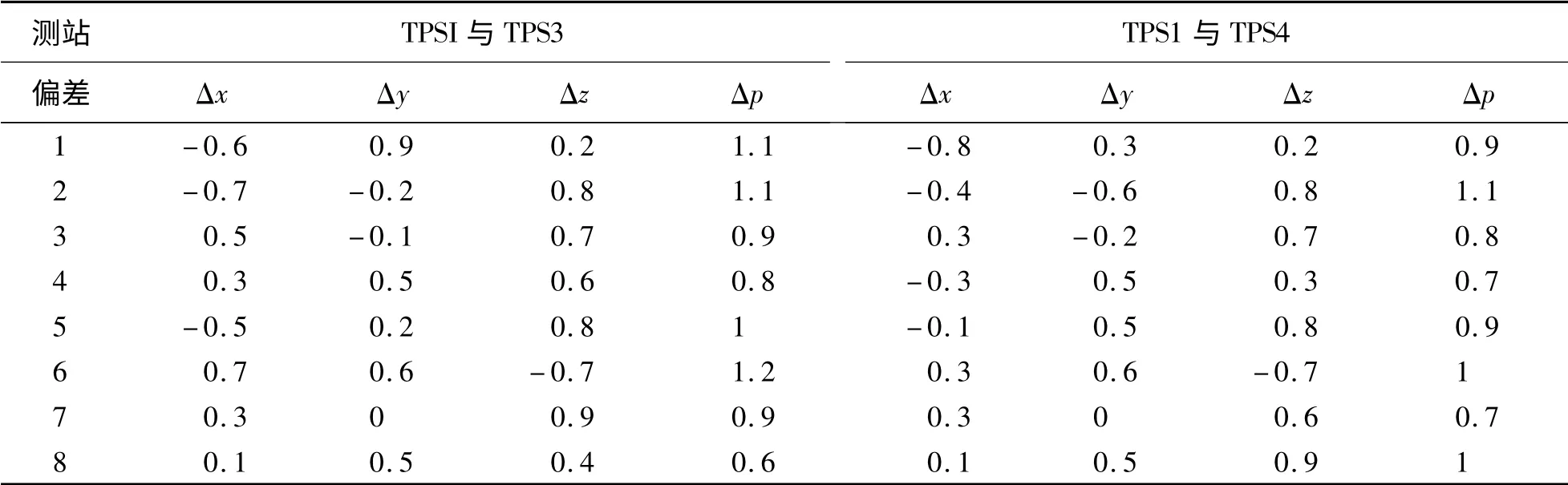
表8 TPS1掃描坐標與TPS3、TPS4掃描坐標點位偏差匯總表 mm
根據(jù)上述偏差進行計算得測站3與測站1相比,目標點的點位平均偏差為

同理計算得測站4與測站1相比,目標點的點位平均偏差為

由以上結(jié)果可知,MS50全站掃描儀基于設(shè)站定向的拼接結(jié)果相當理想。
五、結(jié) 論
本文通過對MS50全站掃描儀的各項性能進行測試與分析,系統(tǒng)地評價了MS50的性能指標,主要結(jié)論如下:
1)介紹了MS50全站掃描儀所應(yīng)用的新技術(shù),包括WFD測距技術(shù)、點云掃描測量技術(shù)、ATR自動照準技術(shù)等。
2)通過多測回多目標法對MS50的一測回水平方向標準差進行了檢定,結(jié)果表明測角精度符合標稱值。通過六段法對MS50的測距加常數(shù)和測距中誤差進行了檢定,結(jié)果表明測距加常數(shù)和測距中誤差均符合標稱值。
3)利用MS50在3個測站點對8個相同目標分別進行掃描,并將掃描坐標與基準坐標進行對比分析,結(jié)果表明MS50的掃描精度符合標稱值。將不同測站點的掃描坐標進行比較,結(jié)果表明MS50的基于設(shè)站定向的拼接能夠達到很高的精度。
[1] 趙煦.基于地面激光掃描點云數(shù)據(jù)的三維重建方法研究[D].武漢:武漢大學(xué),2010.
[2] 花向紅,鄒進貴.《數(shù)字測圖原理與應(yīng)用》精品課程建設(shè)的實踐與思考[J].測繪工程,2008,17(3):74-76.
[3] 李東敏,范百興,周蘊,等.全站式掃描儀測量原理及精度分析[J].測繪通報,2014(8):32-35.
[4] 徐進軍,張毅,王海成.基于地面三維激光掃描技術(shù)的路面測量與數(shù)據(jù)處理[J].測繪通報,2011(11):34-36.
[5] 梅文勝,鄭勇波,周命端.基于PDA的測量機器人自動化網(wǎng)觀測軟件研究[J].測繪信息與工程,2008,33(5):45-47.
[6] 虞積強.全站儀誤差與檢驗研究[D].合肥:合肥工業(yè)大學(xué),2008.
[7] 付子傲,宋以勝,包歡,等.全站儀測距常數(shù)檢定新方法[J].測繪科學(xué)技術(shù)學(xué)報,2009,26(3):174-176.
[8] 張啟福.地面三維激光掃描儀性能測試方法研究[D].鄭州:信息工程大學(xué),2012.
[9] ZHANG Q,SUN X,WANG L.Research of Methods to Test Accuracy of RIEGL VZ-400 Laser Scanner Based on Simple Six-range Analytical Method[J].Geotechnical Investigation&Surveying,2011,39(3):63-66.
[10] LIU JH.Test and Analysis of Measurement Accuracy of Terrestrial 3D Laser Scanner[J].Geomatics&Spatial Information Technology,2013(5):52-56.
猜你喜歡
小學(xué)科學(xué)(學(xué)生版)(2021年5期)2021-07-22 02:40:06
中學(xué)生數(shù)理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學(xué)生數(shù)理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學(xué)小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學(xué)少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學(xué)少年(2017年2期)2017-04-26 21:58:43
中學(xué)生數(shù)理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學(xué)周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學(xué)低年級版)(2015年4期)2015-04-29 00:00:00
