一種基于空間網格的地物要素點云提取方法
2015-03-29 02:33:52孫森震盧小平楊尚波朱寧寧
測繪工程 2015年7期
孫森震,盧小平,楊尚波,朱寧寧,羅 玲
(1.河南理工大學 礦山空間信息技術國家測繪地理信息局重點實驗室,河南 焦作454003;2.河南省礦山空間信息技術重點實驗室,河南 焦作454003)
激光掃描技術具有自動化程度高、獲取數據快等優點,能夠多角度地反映地物三維空間信息,目前 在三 維 城 市 建 模[1-2]、路 面 監 測[3]、電 力 桿 線 檢測[4-5]、鐵路勘察復測[6-7]、隧道監測[8]及大型鋼結構建筑的變形監測[9]等領域已得到廣泛應用。激光點云數據處理的關鍵步驟是目標點云的分類提取 提取結果直接影響到后續應用。點云分類提取方法目前主要有兩類[10-12]:一是基于特定規則的單一濾波算法提取;二是用機器學習的方法進行監督分類。第一類方法針對性較強,但適用性較差;第二類方法分類結果依賴樣本學習的質量,穩定性較差。因此研究具有普遍適用性的點云分類提取方法對點云處理軟件的設計具有現實意義。
特定地物點云提取方法與其空間形狀及其點云信息有關,本文根據三維數學形態學思想提出一種基于地形地物空間形態特征的點云分類提取方法。該方法首先通過場景空間網格數據組織,建立網格索引,劃分網格空間;然后利用不同地物在網格空間中的分布特征設計出5種空間網格算子來提取目標點云,并通過調節空間算子的參數來提高提取算法的靈活性和適用性。結合CJHJ編程,通過對場景較為復雜的鐵路地面Li DAR和城郊機載Li DAR數據中地物要素的提取,驗證本文方法的適用性,為點云分類提取軟件模塊的設計提供一種實踐方法。
1 基于空間網格的地物點云提取方法
1.1 地物要素點云分類提取流程設計
本文提取步驟如圖1所示。
1)對原始點云數據進行拼接處理,統一坐標系,然后進行空間網格數據組織。
2)根據地物要素空間網格特征設置算子參數。
3)對提取結果進行目視判斷并分析,如果得到待提取地物完整點云則通過,如果提取結果不明顯,則適當調整相關的算子參數再進行提取分析。

圖1 地物點云提取流程
1.2 場景空間網格數據組織
1.2.1 建立網格索引
激光點云數據量大且離散,大場景點云處理通常采用網格分塊索引機制提高數據處理的效率。其主要思想是將點云投影到一個特定尺度的平面網格中,記錄網格中點的編號,方便在處理時快速鎖定搜尋點范圍,減少盲目搜索耗費的時間。數據量過大時,不能將大量的點同時讀入計算機內存,因此在點云數據預處理中要對大區域點云分為不同的區塊來存儲,并建立相應的索引,逐塊進行處理以提高處理效率,如圖2所示。也可自主設定網格范圍大小,濾去掃描距離較遠的點云。

圖2 網格劃分
1.2.2 劃分空間網格
建立網格索引后,可以將網格區域[12]中的點視為分布在地理空間中的一個長方體內。根據網格區域點云地物的形狀特征,給出如下定義:
定義1:長方體網格空間按一定尺度劃分為一系列空間三維網格,稱為網格空間。如圖3所示,沿坐標軸XOY面內對應為i行,j列,按Z軸方向為k層。
定義2:如果一個空間網格中含有的點云數量大于閾值則將該空間網格標記為點云網格“實體”,否則視為“虛體”。
通過分析特征地物點云在網格空間中的“虛實”,設計出相應的空間算子來對目標地物點云分類提取。

圖3 網格空間
1.3 特征地物空間網格特征分析
自然場景中的地物復雜多樣,形態各異,大多數地物的空間網格特征并不明顯,但是有一些地物的空間網格分布具有一定特征 例如 較為平坦的地面在空間場景中豎直方向上總是處在最下方;在地面上方的建筑物、樹木、電桿等地物在豎直方向上表現一定的空間網格相續性特征。但是要區分出某種地物,必須找出與其他地物不同的空間網格特征。這就需要分析不同尺度下地物所具有的空間網格特征的差異,并據此設計出具有針對性的空間算子來提取特征地物。例如,電桿通常是孤立的存在,樹木上方有樹冠的特征,建筑墻體在空間中是面狀存在的,懸空的電力線具有線性分布。
因此,空間算子的設計充分顧及網格的空間上下關系。針對一般地形地物特點,本文設計出5種空間算子,為空間網格鄰域算子、空間密實性算子、區域密實性算子、高程連續性算子、線性特征算子等。
1.4 空間網格算子設計
1.4.1 空間網格鄰域算子
定義:在劃分的網格空間中選取5×5×5的空間網格為一個空間網格鄰域算子單位,算子中心網格為算子核,核心網格為實體,其余網格為算子核的鄰域空間。根據鄰域空間中網格相對于算子核的位置設置不同的權重,以鄰域網格的虛實為條件,計算算子的值。以算子值的大小決定算子核內的點云是否為目標點云,如果算子的值在閾值范圍內則提取出中心網格內的點。
其數學表達如式(1)所示,Cqps表示鄰域網格的虛實,虛為0,實為1;Pqps表示對應的空間鄰域網格的權重;Vijk表示空間網格鄰域算子的值。

根據提取對象的形狀特征,設計算子權重Pqps,得出空間網格鄰域算子值Vijk,通過分析特定空間網格鄰域算子在不同地物中的值,可以區分不同的地物點云。本文將該算子用于建筑立面提取、地形濾波、電力線粗提取、噪聲剔除。
1.4.2 空間密實性算子
定義:在網格空間中沿高程方向選取一豎列n個空間網格為一個空間密實性算子單位,算子中的空間網格值為Wijk,將其中的實體空間網格值賦為1,虛體空間網格值為0。令VCij為密度值表示該算子中實體個數的和,LDij為連續度表示實體和虛體的相鄰的連續性,如式(2)、式(3)所示。


計算空間密實性算子的VDij,LDij值,根據地物空間形狀特點可以識別桿狀物、建筑立面、樹冠等點云地物。
1.4.3 區域密實性算子
在空間密實性算子的基礎上,將其組成一個5×5的區域空間密實性算子QMij。如果VDpq大于C1且LDpq大于C2,則Mij為1,否則為0。計算QMij的值如式(4)所示。通過記錄其中每個算子的密實性,來判斷區域網格的密實性。該算子主要用于樹木、電桿的識別定位中。

1.4.4 區域高程連續性算子
由于建筑屋頂與地面形態特征相似,在提取建筑立面后,建筑屋頂被作為地形信息保留下來,但是這片區域懸在地形上空。根據這個特點,設計出一種檢查區域網格空間高程方向連續性的算子。該算子沿高程方向,從下到上統計網格空間每層實體網格的個數,如果某層沒有實體網格出現,則認為地形終止,以此分離建筑屋頂等懸空點云。
1.4.5 線性特征算子
電力線等線狀地物在網格空間中,表現為連續的實體網格。將這些實體空間網格視為一個點,則利用Hough變換提取線特征原理[13],可以從網格空間中檢測并提取符合線狀特征的空間網格實體。
2 點云提取方法實例驗證
2.1 鐵路要素點云分類提取
本文使用RIEGL VZ-400掃描儀采用四站鐵路點云數據,數據包含鐵路軌道、路基、接觸網、電桿及沿線建筑等地物,如圖4(a)所示,因此在點云自動分類提取方法設計中要綜合考慮地物的空間形態特征,合理安排各種地物要素的提取順序。根據地形地物在網格空間中的分布特征,組合運用以上5種算子,將鐵路沿線的建筑、樹木、電桿等地物點云分類提取。
2.1.1 建筑立面的提取
根據墻面的空間網格特征,設置空間網格尺度為0.1 m。第一步,計算場景內網格的空間密實性算子VDij和LDij的值。以VDij大于25、LDij小于5為條件提取點云。然后,使用空間網格鄰域算子,令其權Pijk值為1,計算第一步提取的點云的Vijk值 以Vijk大于20為條件 提取建筑立面 如圖4 b 所示

圖4 地面Li DAR點云提取
2.1.2 電桿的提取
電桿的特征比較明顯,豎直方向連續,一般孤立存在且高度大于3 m。因此,第一步,計算場景內網格的空間密實性算子VDij和LDij的值。以VDij大于30、LDij小于3為條件提取點云,這時提取到的點云含有建筑立面等其他地物。第二步,計算區域密實性算子QMij,以QMij小于3為條件提取點云,其結果如圖4(c)所示。
2.1.3 樹木的提取
樹木的形態比較復雜,不同的樹木樹冠的形狀和大小均有差異。通常在提取場景中的地面、建筑、電桿等地物后剩余的點云為樹木。一般情況提取到的樹木不完整,在實驗中提取了樹木的樹冠,如圖4(d)所示。
2.1.4 鐵路軌道電力線的提取
鐵路沿線重要的監測對象為鐵路路基軌道及接觸網。由于接觸網的高程特征比較容易提取,而軌道與路基連接緊密,其反射強度信息與局部路基反射強度信息相似,單純利用形態學方法或者反射強度方法對其分類提取比較困難。
根據地面點處在網格空間最下層的特點,首先提取地面點云信息,其中包含軌道、路基信息。然后根據軌道與地面的反射強度信息差異對軌道點云進行粗提取。粗提取后的軌道點云包含許多離散的地面點信息,再次劃分網格空間,根據軌道線性特征,利用線性特征算子對軌道精確提取,提取結果如圖5(a)所示。
對于接觸網點云信息,其具有線狀懸空的特點,通過設計出特定的空間鄰域算子,結合接觸網的高程范圍信息可粗提取具有線狀特征的點云,然后運用線性特征算子剔除噪聲信息,其結果如圖5(b)所示。
2.2 機載Li DAR點云分類提取
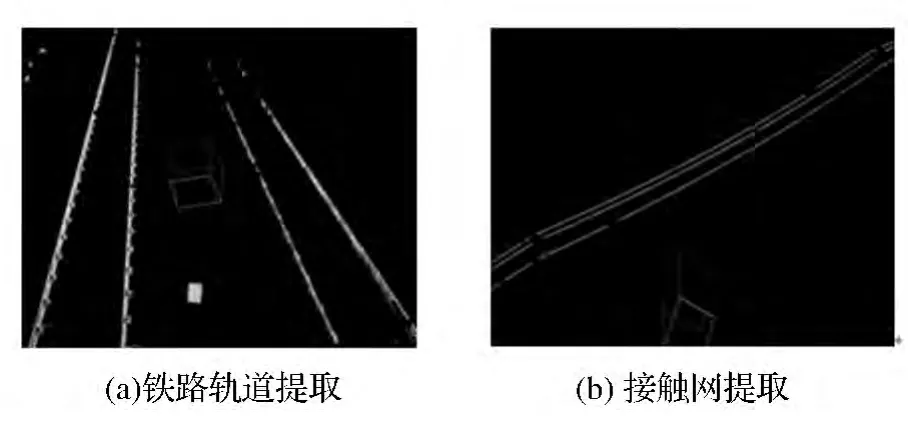
圖5 鐵路要素提取
機載Li DAR點云數據空間范圍大,點云密度相對稀疏,其主要用于建立大區域的數字高程模型。本文選取500 m×500 m的城市郊區機載Li-DAR數據為實驗對象,其中含有工業廠房、農田、林地等地物,點云數量約120萬,如圖6(a)所示。實驗目的是分別提取地面點云和建筑屋頂點云,其過程如下:
第一步,設置網格尺度為0.3 m,使用區域密實性算子剔除樹木點;
第二步,運用密實性算子剔除豎直方向上連續的點云,使地面與建筑屋頂分離;
第三步,運用區域高程連續性等算子,分離屋頂點云和地面點云。地面點云如圖6(b)所示。用提取的建筑屋頂生成建筑模型,如圖6(c)所示。
3 分類提取精度分析
3.1 分類精度的影響因素
點云分類提取結果的精度是衡量算法優劣的首要指標,其中包含分類提取的準確率和查全率。選擇合理的分類方法能夠提高提取的精度,但是由于點云數據的離散的特征和地物復雜鄰接關系使分類提取精度的提高受到限制。本文方法提取的目標地物點云的精度與三種因素有關:①點云密度均勻性;②地物點云的形態特征的差異程度;③分類算子參數的設計的合理性。通過對地面點云鐵路要素地物提取結果與實際地物比較,得出分類精度如表1所示。機載Li DAR點云中的建筑屋頂提取精度結果如表2所示。

圖6 機載Li DAR點云提取
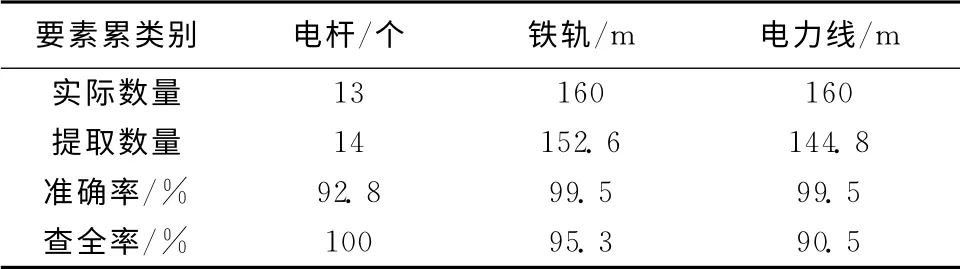
表1 鐵路要素提取精度分析

表2 機載點云屋頂提取精度分析 m2
3.2 分類算法優缺點
本文分類提取算法設計主要基于點云地物的三維數學形態特征,其優點有:①算子的設計較為形象、具體、靈活,易于理解和模塊化編程;②通過點云分塊索引的建立提高算法的效率;③提取的結果精度較高,穩定性強。可以將算子參數保存,建立針對不同地物特點的算子庫來增強算法的普遍適用性。其不足表現在,該算法程序執行需要使用較大的計算機內存空間,算子的設計需要一定的經驗積累,在地物形態特征相似區域提取的準確率較低。
4 結束語
本文通過建立網格空間,根據地物要素在網格空間中的分布特征,設計出相應的空間分類算子,結合地物的反射強度差異,運用不同方法組合對地物點云進行提取。將算法編制為程序,通過對鐵路地面Li DAR和郊區機載Li DAR數據的分類提取處理,驗證算法的有效性。隨著激光Li DAR硬件技術的發展,能夠獲取的目標物體的點云信息越來越多。本文分類提取方法的算子設計主要基于點云地物的三維數學形態特征,沒有融合目標地物的圖像信息和利用多回波信息,這是需要進一步研究的方向。
[1] 魏征,董震,李清泉,等.車載Li DAR點云中建筑物立面位置邊界的自動提取[J].武漢大學學報:信息科學版,2012,37(11):1311-1315.
[2] 赫春曉,李浩.基于三維激光掃描數據的三維實景構建[J].測繪工程,2013,22(1):81-85
[3] 王果,崔希民,袁德寶,等.車載激光點云領域比較的道路邊線提取方法[J].測繪通報,2012(9):55-57.
[4] 梁靜,張繼賢,劉正軍.利用機載Li DAR點云數據提取電力線的研究[J].測繪通報,2012(7):17-20.
[5] 鄒曉亮,于英,張永生,等.基于車載激光掃描數據的電線桿自動識別與定位[J].測繪科學,2012,37(2):91-93.
[6] 王曉凱.車載激光雷達在鐵路復測中的應用探討[J].鐵道建筑,2013(2):81-83.
[7] 李建強.地面激光掃描技術在既有鐵路勘測中的應用研究[J].鐵道建筑,2012(4):128-131.
[8] 于鵬磊,于海洋,謝秋平,等.基于RANSAC算法的地鐵隧道點云數據濾波[J].測繪工程,2014,23(8):28-31
[9] 王晏民,王國利.地面激光雷達用于大型鋼結構建筑施工監測與質量檢測[J].測繪通報,2013(7):39-42.
[10]郭波,黃先鋒,張帆,等.顧及空間上下文關系的Joint-Boost點云分類及特征降維[J].測繪學報,2013,42(5):715-720.
[11]左志權,張祖勛,張劍清.知識引導下的城區Li DAR點云高精度三角網漸進濾波方法[J].測繪學報,2012,41(2):246-250.
[12]龔亮,張永生,李正國,等.基于多尺度虛擬網格與坡度閾值的機載Li DAR點云濾波方法[J].測繪科學,2012,37(1):101-103.
[13]巫兆聰,萬茜婷,梁靜,等.粒度Hough變換及其在遙感影像直線檢測中的應用[J].武漢大學學報:信息科學版,2007,32(10):860-863.
猜你喜歡
北方建筑(2021年6期)2021-12-31 03:03:54
數學小靈通(1-2年級)(2021年4期)2021-06-09 06:25:56
文苑(2020年10期)2020-11-07 03:15:36
現代裝飾(2020年6期)2020-06-22 08:43:12
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
當代陜西(2019年10期)2019-06-03 10:12:04
中學生數理化·七年級數學人教版(2019年4期)2019-05-20 10:06:32
中學生數理化·七年級數學人教版(2018年6期)2018-06-26 08:36:06
初中生世界·七年級(2017年9期)2017-10-13 22:27:46
數學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54