動車組外車皮清洗車研制
2015-03-28 08:55:24唐繼烈上海鐵路局科研所
上海鐵道增刊 2015年3期
關(guān)鍵詞:作業(yè)
唐繼烈 上海鐵路局科研所
動車組外車皮清洗車研制
唐繼烈 上海鐵路局科研所
介紹了折返站臺用動車組外車皮清洗車的工作原理、主要技術(shù)參數(shù)、機械系統(tǒng)、電氣控制系統(tǒng)和安全保護措施。清洗車自帶水箱電源、操作簡便效率高、自動化程度高、多重防護措施保證作業(yè)安全,是折返站臺動車組外車皮保潔的有效設(shè)備。
動車組;清洗車;自走行;閉環(huán)控制
動車組經(jīng)高速運行至終到站時車體已粘上較多的污垢,為確保動車組車容整潔,短交路動車組在折返前需對站臺側(cè)的外車皮進行清潔。目前主要的作業(yè)方式為保潔員使用水桶、刷子、拖把、抹布等工具對外車皮擦洗。這種傳統(tǒng)的方式勞動強度較大、清洗質(zhì)量不穩(wěn)定、人力成本也較高。隨著更多的高鐵線路開通運營,折返站動車組外車皮清潔作業(yè)工作量隨之增大,為此研制高效的折返站用動車組外車皮清洗車十分必要。
1 工作原理
清洗車主要由機械系統(tǒng)、電氣控制系統(tǒng)兩部分組成,主要內(nèi)部結(jié)構(gòu)如圖1和實際外觀如圖3、圖4所示。
清洗車有人工駕駛和自動洗車兩種工作模式。在人工駕駛模式下,操作員在站臺上通過遙控器來控制清洗車的前進、后退和轉(zhuǎn)向。操作員將清洗車駕駛到作業(yè)起始位置,選定好洗車方向后進入自動洗車模式,清洗車沿站臺勻速行進的同時,通過含水的仿形毛刷滾刷外車皮,最后用清水經(jīng)增壓霧化后沖洗外車皮上的污垢。在自動洗車模式下電氣控制系統(tǒng)通過兩個傳感器實時測量清洗車與動車組的距離,經(jīng)計算處理后通過控制伺服電機調(diào)整清洗車的轉(zhuǎn)向,這樣使得清洗車的毛刷與動車組外車皮保持一個適當?shù)慕佑|面積。清洗刷、噴淋裝置的啟停,清洗車的前進、后退、緊急制動以及人工駕駛模式下的轉(zhuǎn)向,均可通過遙控器來控制。通過觸摸顯示屏能設(shè)定運行參數(shù)和實時顯示各項監(jiān)測數(shù)據(jù)。通過多種傳感器和機械裝置來確保清洗車不刮擦動車組、不跌落站臺、不碰撞障礙物和行人,在作業(yè)過程中通過聲光提示周圍行人。
2 主要技術(shù)參數(shù)
清洗車主要技術(shù)參數(shù)如下:
(1)外形尺寸:長×寬×高=1.6 m×1.0 m×2.3 m;
(2)空車重:約400 kg;
(3)總重:約800 kg;
(4)儲液箱體積:約400 L;
(5)毛刷直徑(仿形):0.9 m~1.1 m;
(6)蓄電池:DC24 V,250 Ah;
(7)作業(yè)時最大功率:1 200 W;
(8)清洗刷轉(zhuǎn)速:120 r/min;
(9)工作走行最高速度:0.5 m/s;
(10)返空最高速度:2 m/s;
(11)最小轉(zhuǎn)彎半徑:2.5 m。
3 機械系統(tǒng)
清洗車的機械系統(tǒng)主要由支架、外殼、走行驅(qū)動總成、轉(zhuǎn)向驅(qū)動總成、電池箱、儲液箱、清洗刷總成、噴淋總成等部件構(gòu)成。結(jié)構(gòu)圖如圖1所示。
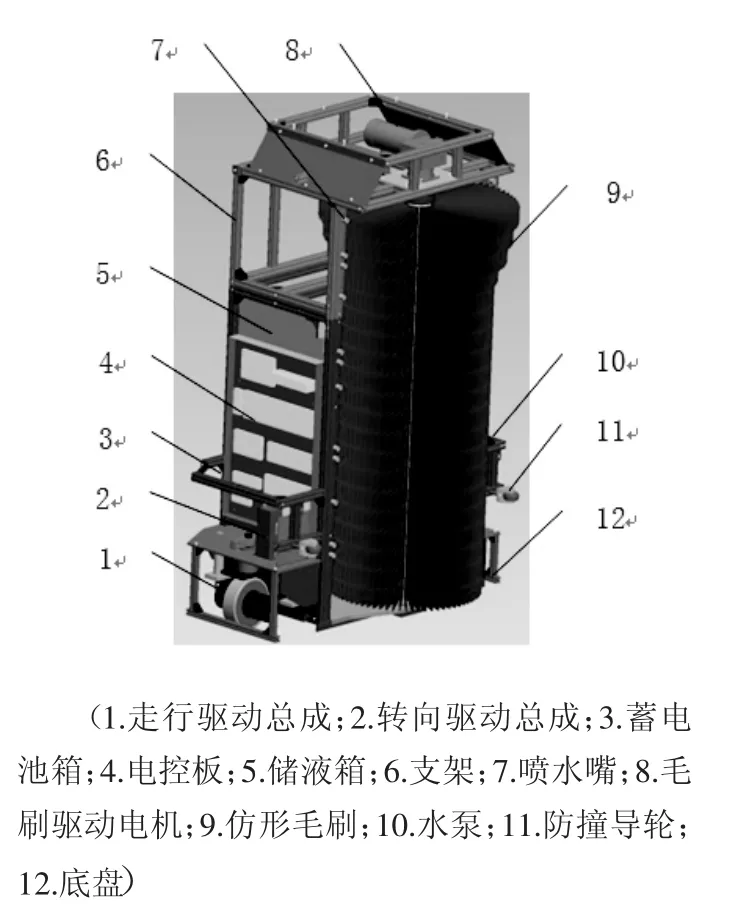
圖1 清洗結(jié)構(gòu)圖
構(gòu)架承載清洗車的其他部件,包括槽鋼焊接的底盤和方鋼焊接的框架。外殼材料選用玻璃鋼,使用模具成型工藝制作,且色調(diào)與動車組的白色車身相配。走行驅(qū)動總成由1個驅(qū)動輪和2副承載輪架組成。驅(qū)動輪有車輪、電機、減速器、停車制動器、轉(zhuǎn)向連接軸五個主要部件。驅(qū)動輪兼具走行和轉(zhuǎn)向兩個功能,轉(zhuǎn)向軸與驅(qū)動輪底座上部相連。驅(qū)動輪將動力、傳動和制動集成一體,電機和驅(qū)動輪軸心合二為一,使用二級圓柱齒輪平行軸減速,結(jié)構(gòu)緊湊,方便在清洗車內(nèi)安裝布置。驅(qū)動輪電機軸尾部安裝的電磁失電制動器在通電時電磁吸合制動緩解,在斷電時彈簧加壓摩擦制動,使得清洗車在停車斷電時處于制動模式下,能有效防止溜車。1副承載輪架由2個直徑為80 mm的聚氨酯車輪并列組成,滿足底盤的大載荷小離地間隙要求,底盤離地越低有效清洗面積就越大。
轉(zhuǎn)向驅(qū)動總成由伺服電機、行星齒輪減速器和連桿機構(gòu)等組成。伺服電機的輸出經(jīng)行星齒輪減速增扭后,通過連桿機構(gòu)與驅(qū)動輪轉(zhuǎn)向軸相連。
電池箱考慮到清洗車的重心要求,設(shè)置在清洗車的底部。
儲液箱由清水箱、清洗劑箱兩個組成,位于清洗車的側(cè)面,電池箱的上部,用不銹鋼焊接而成。清水箱的下部設(shè)有排水螺栓,上部設(shè)有超聲波液位傳感器,側(cè)上方也設(shè)有液位計。
清洗刷總成由直流調(diào)速電機、蝸輪蝸桿、毛刷等組成。電機輸出經(jīng)渦輪蝸桿減速后驅(qū)動清洗刷轉(zhuǎn)軸,電機臥式安裝能最大限度利用高度空間。由于動車組外車皮為弧面,清洗毛刷旋轉(zhuǎn)時的外形與之相匹配,設(shè)計成綜合各個車型的動車組外輪廓參數(shù)的仿形結(jié)構(gòu)。
噴淋總成由噴淋水泵組、管路、扇形噴嘴等組成。6個直流24 V微型隔膜泵組成噴淋水泵組,每個泵通過管路連接4個噴嘴。隔膜泵內(nèi)裝的壓力開關(guān)通過溢流閥保護泵在堵轉(zhuǎn)時不易受損壞。噴嘴將水霧化后按扇形狀噴出。噴嘴按20%的重疊布置噴淋更均勻,消除了垂直噴淋時由于地球重力而引起扇形剖面產(chǎn)生逐漸變細的邊緣。
3 電氣控制系統(tǒng)
電氣控制系統(tǒng)是清洗車的控制中樞,通過傳感器采集各項數(shù)據(jù),同時對各個執(zhí)行機構(gòu)發(fā)出指令。包括可編程邏輯控制器(PLC)、人機界面、傳感器和遙控發(fā)射接收裝置、聲光警示燈等。通過人機界面可實現(xiàn)電機轉(zhuǎn)速設(shè)定、超聲波距離傳感器數(shù)據(jù)顯示、手動控制各電機啟停、低水位低電壓報警提示等功能。清洗車選用直流24V蓄電池作為供電電源。
輸入傳感器信號有:2路清洗車到動車組車體間距離,蓄電池電壓、電流,水箱水位,8路站臺邊緣識別,安全觸邊探測障礙物,前后超聲波障礙物探測傳感器、8路遙控器各按鍵的信號接收。輸出控制信號有:驅(qū)動輪電機啟停、轉(zhuǎn)速、正反轉(zhuǎn)及緊急制動控制,轉(zhuǎn)向伺服電機控制,各水泵啟停控制,洗車刷旋轉(zhuǎn)啟停及正反轉(zhuǎn)控制,走行緩解制動器控制,聲光提示啟停控制。
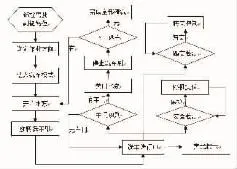
圖2 清洗控制程序流程圖
清洗機控制流程如圖2所示。首先操作遙控器將清洗車駕駛到清洗起始位,在人機界面上選擇作業(yè)方向(前進洗車、后退洗車兩種模式),進入洗車模式后自動開啟水泵、洗車刷電機。當測距傳感器探測到車門時,控制系統(tǒng)會先關(guān)閉水泵,并停止洗車刷旋轉(zhuǎn),待通過車門后控制系統(tǒng)自動開啟水泵和洗車刷電機,直到全部完成該動車組清洗。控制器通過兩個超聲波測距實時采集清洗車到動車組車身的距離,經(jīng)計算處理后對伺服電機驅(qū)動器發(fā)出控制指令來調(diào)整清洗車轉(zhuǎn)向,使得清洗車與動車組保持合適的清洗距離。在清洗過程中各安全防護模塊實時監(jiān)測各項參數(shù),同時通過聲光提示周邊的行人。
4 安全保護
清洗車工作環(huán)境為高鐵站臺,對使用安全性有較高的要求。一方面是保證在洗車過程中不擦傷動車組;另一方面是在走行過程中防止誤傷行人、站臺跌倒和誤撞障礙物。安全保護傳感器布置如圖3所示。
安全保護措施主要包括三個部分:
(1)電氣機械雙重保護防止清洗車擦傷動車組車體。兩個超聲波測距傳感器實時測量清洗車與動車組車體間的距離,控制器根據(jù)兩個距離測量值實時調(diào)整轉(zhuǎn)向。在超聲波傳感器測距失效的情況下,如果清洗車離動車組距離過近,側(cè)面的防撞橡膠導輪與車體為滾動接觸,避免清洗車擦傷車體。
(2)雙重光電傳感器防止清洗車跌落站臺。清洗車外殼的四角各分別安裝兩個光電傳感器,形成冗余保護。一個垂直向下探測站臺,另一個與地面成45°探測站臺,當其中一個傳感器未探測到站臺時清洗車立即制動,避免清洗車跌落站臺。制動保護后人工復位才清洗車能繼續(xù)行進。
(3)雙重漸進式保護防止清洗車在走行過程中與障礙物或行人相撞。在清洗車前后外殼上分別安裝兩個超聲波傳感器,當清洗車與障礙物或行人相距0.6 m時聲音警示操作人員停車,相距0.3 m時清洗車自動制動,制動保護后需在人機界面上復位后清洗車才能移動。在清洗車底部三面安裝有安全觸邊傳感器,能有效探測如站臺上的圓形或方形柱、電梯等障礙物。安全觸邊是橡膠管內(nèi)裝有連續(xù)的干簧管式傳感器,能可靠地感應(yīng)到與之接觸的各種障礙物。
清洗車在走行系統(tǒng)出現(xiàn)故障的情況下,可先手動松開制動緩解手柄,通過救援把手與轉(zhuǎn)向機構(gòu)連接,將清洗車移動到安全區(qū)域。

圖3 安全保護傳感器布置圖
5 結(jié)語清洗車是集走行、洗刷和多功能于一體的折返站用動車組外車皮清洗設(shè)備。清洗車利用計算機閉環(huán)控制技術(shù)實現(xiàn)作業(yè)時自動轉(zhuǎn)向,保證清洗質(zhì)量和作業(yè)效率,通過智能算法識別出車門來自動控制清洗刷和噴淋裝置的啟停,多種類型傳感器的運用保證安全。單人操作1臺清洗車在6 min內(nèi)即可完成1標準列的動車組清洗,較傳統(tǒng)人工作業(yè)方式,能有效減輕勞動強度,提高作業(yè)效率。圖4為清洗車在上海站現(xiàn)場作業(yè),經(jīng)試用各項技術(shù)參數(shù)達到了設(shè)計要求,操作簡便。
猜你喜歡
小主人報(2022年1期)2022-08-10 08:28:44
新作文·小學低年級版(2021年9期)2021-11-27 07:57:46
學生天地(2020年17期)2020-08-25 09:28:54
作文成功之路·小學版(2020年7期)2020-08-24 08:19:30
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
作文成功之路·小學版(2020年7期)2020-01-02 10:10:44
趣味(數(shù)學)(2018年12期)2018-12-29 11:24:10
小學生作文(中高年級適用)(2017年10期)2017-11-13 06:01:00
能源(2016年2期)2016-12-01 05:10:46
故事大王(2016年7期)2016-09-22 17:30:08
