六相永磁同步電機缺相容錯控制
2015-03-28 02:27:19王永興溫旭輝
電工技術學報 2015年5期
王永興 溫旭輝 趙 峰
(中國科學院電工研究所電力電子與電氣驅動重點實驗室 北京 100190)
?
六相永磁同步電機缺相容錯控制
王永興 溫旭輝 趙 峰
(中國科學院電工研究所電力電子與電氣驅動重點實驗室 北京 100190)
為了實現(xiàn)六相永磁同步電機缺相后的矢量控制,根據定子磁勢不變的原則,以銅耗最小為目標,對雙Y移相30°六相永磁同步電機缺一相繞組的電流進行優(yōu)化求解。根據所求得的優(yōu)化電流,獲得缺相后的變換矩陣,從而建立缺一相的六相永磁同步電機旋轉坐標系下數(shù)學模型,并由此提出缺相后的解耦矢量控制方法。分析漏感和空間諧波對該容錯控制下轉矩脈動的影響,提出相應的抑制方法。實驗驗證了六相永磁同步電機容錯控制算法的正確性,其有效減少了缺相后的轉矩脈動,且具有較好的動態(tài)性能,提高了驅動系統(tǒng)的可靠性。
六相永磁同步電機 容錯控制 優(yōu)化電流 缺相 轉矩脈動
0 引言
多相電機在電動汽車、艦船電力推進、風力發(fā)電及航空航天等要求大功率及高可靠性的應用場合得到越來越多的關注和認可。相數(shù)的增加使多相電機可提供比三相電機更多的控制自由度,增加的自由度可用來實現(xiàn)在缺相故障狀態(tài)下的容錯運行[1-6]。電機驅動系統(tǒng)中經常發(fā)生的電機繞組開路、功率器件開路和短路等故障都可通過硬件故障隔離的方法轉變?yōu)殡姍C缺相運行,通過容錯控制使剩余的正常相可補償故障引起的轉矩脈動,從而簡化了容錯控制的復雜性。
現(xiàn)有多相驅動系統(tǒng)電機缺相的容錯控制算法可分為兩大類:第一類為優(yōu)化電流控制。當多相電機驅動系統(tǒng)發(fā)生一相或幾相故障時,通過調整剩余相的電流來保證磁勢不變[7,8]。最初,學者們基于保證磁勢不變的基礎對未發(fā)生故障的相電流進行優(yōu)化,優(yōu)化的原則為保證相電流的幅值一致,同時保證銅耗最小[9-11],或者只保證銅耗最小,而電流幅值不一致[12,13],但這些方法都需要離線計算,而且其PWM調制方法大都采用滯環(huán)比較PWM。這一類方法未建立缺相后的電機數(shù)學模型,所以其電流控制只能采用滯環(huán)控制,不適合大功率高性能場合。第二類為磁場定向的矢量控制,該方法需要建立電機缺相后的解耦數(shù)學模型,從而實現(xiàn)磁場的定向。Y.Zhao等[14,15]通過解耦變換和非對稱旋轉變換建立了六相感應電機缺相下的多維解耦數(shù)學模型,從而實現(xiàn)了矢量控制,并給出了缺相下PWM的調制方法;文獻[16]通過對稱旋轉變換推導缺相下五相永磁同步電機的數(shù)學模型,然后通過解耦變換矩陣使缺相后的電機電感矩陣對角化,從而實現(xiàn)了解耦的矢量控制;文獻[17-19]給出了六相永磁同步電機缺相時的不對稱旋轉變換矩陣,但未給出具體的物理意義,通用性不強,而且此方法是一個近似的方法;文獻[20]給出了雙三相永磁電機不同中心點連接方式下的一相缺相模型,并給出了相應的控制方法。以上文獻都是在一些理想的假設下得到的,未考慮漏感和空間諧波等因素的影響。
本文以中性點隔離的雙Y移相30°六相永磁同步電機為研究對象,其繞組結構如圖1所示。由于兩套繞組的中性點隔離,所以此種電機最簡單的容錯控制方法為直接切除故障相所在的一套繞組,但這種方法會造成另一套繞組的電流增大1倍,同時未充分利用無故障相來輸出轉矩。本文對一相繞組斷路情況進行研究,從理想假設出發(fā),結合上述提到的兩類方法,在最優(yōu)電流計算的基礎上建立電機缺相后的數(shù)學模型,實現(xiàn)缺相后基于最優(yōu)電流的解耦矢量控制;同時分析了缺相后漏感和空間諧波對轉矩脈動的影響,提出了相應的抑制方法,進一步減小轉矩脈動,最后通過實驗驗證了本文所提出方法的正確性。

圖1 雙Y移相30°電機的繞組結構Fig.1 Winding structure of motor with double Y-connected phase-shift 30° windings
1 缺相的數(shù)學模型與控制
為了簡化分析,首先對六相永磁同步電機做如下假設:
(1)磁路線性,忽略磁滯及渦流損耗;
(2)不計定子表面齒、槽的影響,轉子上無阻尼繞組;
(3)繞組正弦分布;
(4)忽略電機漏感。
本節(jié)根據電機無擾運行的條件進行故障后的電機電流優(yōu)化,并在此基礎上對六相永磁同步電機一相繞組斷路情況進行了建模,并給出了相應的控制方法。
1.1 缺相后的優(yōu)化電流計算
以F相繞組斷路為例來進行分析。缺相時,電機要實現(xiàn)無擾運行,需要電機在缺相前后定子磁勢保持不變,其缺相后的定子磁勢表達式為
f=NAiA+NBiB+NCiC+NDiD+NEiE
iDcos(γ-5α)+iEcos(γ-8α)]
(iA+δ-1iB+δ-4iC+δ-5iD+δ-8iE)ejγ]
(1)
式中,δ=ejπ/6;α=π/6;Ns為每相繞組匝數(shù);γ為繞組空間角度;ix(x=A,B,C,D,E)為各相的電流;Nx(x=A,B,C,D,E)為各相的繞組函數(shù),以B相為例,其繞組函數(shù)為NB=0.5Nscos(γ-α)。
假設缺相前定子磁勢為
(2)
則式(1)和式(2)相等,有
iA+iBcos(α)+iCcos(4α)+iDcos(5α)+iEcos(8α)
=3Icosθ
iBsin(α)+iCsin(4α)+iDsin(5α)+iEsin(8α)=3Isinθ
(3)
式中,θ為電機電角度,θ=ωt,其中ω為電機的電角速度。
六相永磁同步電機采用兩套繞組中性點隔離的結構,則各相電流滿足
iA+iC+iE=0
iB+iD=0
(4)
式(3)和式(4)組成的線性方程組有5個變量,4個方程,其解不惟一,多的自由度可用于電機優(yōu)化。這里選擇的優(yōu)化條件是定子銅損最小,銅損可表示為
(5)
這樣電流求解的問題可等價為一個條件極值的求解問題,即:在滿足式(3)和式(4)的條件下求式(5)的最小值。采用拉格朗日乘數(shù)法,最后可得F相缺相后其他相的電流為
(6)
令
式(6)所示的電流是電機缺相后以銅耗最小的原則優(yōu)化獲得的,其幅值和相位的變化是為了獲得與故障前相同的旋轉磁勢,從而實現(xiàn)電機的無擾運行。
1.2 變換矩陣的確定
為了在建模和控制中實現(xiàn)銅耗最小,需要獲得缺相后的變換矩陣和旋轉矩陣。由于電機中性點隔離,根據式(4)的電流約束可得其零序分量為
(7)

(8)

(9)
(10)
則其反變換矩陣為
(11)
另外,Park和反Park變換如式(12)所示
(12)
由此可得到五相靜止坐標系與二相旋轉坐標系的變換矩陣為
T5s/2r=C2s/2rT5s/2s
T2r/5s=T2s/5sC2r/2s
(13)
1.3 缺相后數(shù)學模型的建立
根據繞組函數(shù)理論,電機的電感可表示為
(14)
式中,r為定子內壁半徑;l為電機定轉子軸向長度;μ0為真空磁導率;Nx(γ)為繞組函數(shù);σ(γ,θ)為氣隙磁導函數(shù),對于凸極式電機,可表達為
σ(γ,θ)=σ0+σ2cos 2(γ-θ)
(15)
式中,σ0、σ2分別為氣隙磁導函數(shù)的直流和二次分量幅值。
通過式(14)可得到F相繞組斷路后的自然坐標系下的電機電感為
(16)
在自然坐標系下,電機電壓方程可表示為
(17)
通過旋轉變換可得

令udqz=T5s/2ru,idqz=T5s/2ri,則F相缺相的六相永磁同步電機在旋轉坐標系下的數(shù)學模型為
(19)
式中,Ld=3Lm+3Lθ;Ld=3Lm+3Lθ;udqz=[uduquz]T;idqz=[idiqiz]T。
(20)
由式(19)可知,F(xiàn)相繞組斷路后按磁勢不變原則,所得到的旋轉坐標系下的數(shù)學模型仍與電機的旋轉角度θ相關,電感矩陣和磁鏈是時變的,所以此時不能像正常狀態(tài)下的六相永磁同步電機那樣對各電流分量進行解耦控制,傳統(tǒng)的控制方法已無法應用到缺一相的六相永磁同步電機上。
1.4 缺相后的解耦容錯控制
為了消除時變矩陣的影響,達到解耦控制的目的,對式(19)兩邊同時乘以A-1(θ),則可得到
(21)
其中
(22)
令
(23)
則式(21)可寫為
(24)
由電機的磁共能可知此時電機的轉矩為
=3p((Ld-Lq)idiq+λPMiq)
(25)
式(24)的最后一項是與定子電阻相關的二倍頻分量,其與轉速無關,若忽略這一項的影響,則F相繞組斷路后的六相永磁同步電機的數(shù)學模型與正常狀態(tài)下的數(shù)學模型的形式是一致的、解耦的,所以系統(tǒng)可采用簡單的PI控制器及前饋補償(PI+FFController)來實現(xiàn)對轉矩的穩(wěn)定精確控制,前饋補償項可根據式(24)
的最后一項來實現(xiàn),控制框圖如圖2所示。由式(25)可看出此時轉矩方程與正常狀態(tài)下的方程一致,因此在繞組短路后轉矩仍可實現(xiàn)解耦平滑地控制。
上面討論了F相繞組斷路時的容錯控制,對于B、D兩相可通過移動旋轉坐標系的定向軸來實現(xiàn),對于B相繞組斷路時,將此時的B相當成F相,記為F′,同時將旋轉坐標系的d軸由A相軸線逆時針旋轉2π/3到C相軸線,此時的C相相當于原來的A相,定義為A′,其他各相依次旋轉2π/3得到新的各相空間位置,如圖3所示。

圖2 F相繞組斷路后的解耦控制框圖Fig.2 Block diagram of decoupling control with F phase winding failure
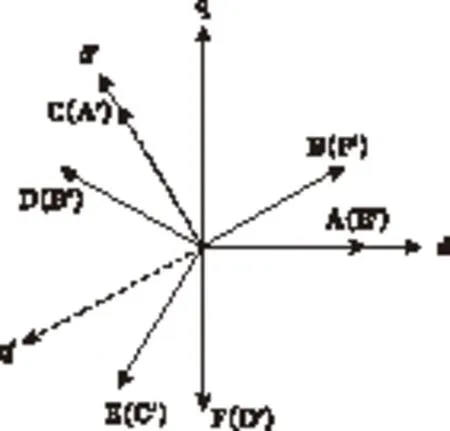
圖3 B相繞組斷路后的坐標定位Fig.3 Coordinate of B phase winding failure
此時
(26)
同理
(27)
相應的旋轉角度為
(28)
通過式(26)~式(28)可得B相繞組斷路時的控制框圖如圖4所示。
同理,類似可得D相繞組斷路時的處理方法,但由于六相永磁同步電機是不對稱分布的結構,無法直接通過F相斷路的情況得到A、C、E相的數(shù)學模型和控制方法,只需在A、C、E相中任取一相斷路的情況來得到相應的數(shù)學模型,從而獲得其余兩相斷路的控制方法,分析方法與上述方法一致,在此不再贅述。

圖4 B相繞組斷路后的解耦控制框圖Fig.4 Block diagram of decoupling control with B phase winding failure
2 轉矩脈動評估
由于上述方法是在一些理想條件的假設中提出的,但實際中由于繞組端部必然存在漏磁的影響,電機漏感是存在的。而且在多相電機中,由于受到槽數(shù)的限制,電機繞組一般不可能設計成正弦繞組,甚至為了增加功率密度,可能會設計成整距繞組,此時空間諧波的存在對容錯控制必然造成影響,從而產生轉矩脈動。
下面以F相繞組斷路的情況為例對這些影響進行分析。由于磁路線性,所以此處分別對漏感和空間諧波單獨作用時的影響進行分析,將其疊加到1.3節(jié)的數(shù)學模型上,即為考慮了非理想因素的六相永磁同步電機的容錯控制。
2.1 電機漏感的影響
在1.4節(jié)提出的容錯控制方法中,忽略了電機漏感的影響,但在實際多相電機中漏感非常重要,其對諧波有很強的濾波作用,此處只考慮漏感的作用來評估其所產生的影響和造成的轉矩脈動。
當只考慮漏感的作用,則缺相后的漏感電壓方程可寫為
(29)
式中,us_ls=[uA_lsuB_lsuC_lsuD_lsuE_ls]T;Lls為電機漏感。
式(29)通過式(10)、式(12)和式(23)變換到等效旋轉變換坐標下為
(30)
從式(30)可知,微分項中存在二倍頻的時變量,但由于其在微分項中,其在動態(tài)過程中對控制的影響較小,可忽略不計。第二項是與電機轉速相關的二倍頻時變量,隨著轉速的升高,這一項的作用會增強,其對電流的控制起到了二倍頻交流擾動的作用,造成交、直軸電流的波動,進而造成轉矩存在二倍頻的波動,所以可通過提高電流環(huán)帶寬來克服擾動的影響,如果要得到更高的性能,可將式(30)采用參數(shù)前饋補償方法加入到如圖2所示的控制框圖中來消除其對電流控制的影響,減小電流波動,此時其產生的轉矩為
(31)
從而可消除漏感對缺相后的控制系統(tǒng)的影響。
2.2 五次空間諧波的影響
由于缺相的影響,電機自由度降低,五次諧波已無法與基波保持正交[21],這樣其也會對電流控制和轉矩脈動產生影響,為簡化分析,忽略基波和五次諧波的耦合,只考慮五次空間諧波的作用。而且對于五次空間諧波,電機的凸極效應很小,可忽略,則只考慮五次空間諧波的作用所對應的缺相后的電壓方程為
(32)式中,us_s5=[uA_s5uB_s5uC_s5uD_s5uE_s5]T;Λm5=λm5[cos5θcos5(θ-α) cos5(θ-4α) cos5(θ-5α) cos5(θ-8α)]T;λm5為五次諧波磁鏈。
(33)
式中,Lm5為五次諧波電感。只考慮五次空間諧波的等效電壓方程為
(34)
由式(34)可看出,微分項中存在二倍頻的時變量,但由于其在微分項中,其在動態(tài)過程中對控制的影響較小,可忽略不計。第二項和第三項是與電機轉速相關的二倍頻時變量,其對電流的控制起到交流擾動的作用,雖然可通過前饋補償?shù)姆椒▉硐鋵﹄娏骺刂频挠绊懀瑴p小電流的波動,但其仍會產生相應的轉矩脈動,這部分轉矩脈動可表示為
15pλPM5izsin5θ
(35)
若電流能夠無靜差地跟蹤,使iz=0,由式(35)可看出其轉矩含有四倍頻和六倍頻的脈動,其大小與id、iq和λPM5有關,各頻次的轉矩脈動幅值可表示為
(36)
綜上所述,電機的漏感和五次空間諧波均會對電機的缺相容錯控制的電流控制造成影響,從而產生轉矩脈動,但漏感對轉矩脈動的影響可通過前饋補償?shù)姆椒右韵宕慰臻g諧波對轉矩脈動的影響通過控制只能減小,而不能消除。
為了驗證漏感和五次空間諧波對轉矩脈動的影響,以表1中所示六相永磁同步電機參數(shù)進行仿真,以F相繞組在0.15 s發(fā)生斷路為例,仿真結果如圖5所示,在0.15~0.20 s之間容錯控制中未加入漏感和空間諧波的前饋補償算法,所以交、直軸電流的波動較大,0.20 s后加入前饋補償算法,交、直軸電流波動減小到發(fā)生故障前水平,但轉矩脈動幅值減小約50%,這與理論分析一致,另外圖6給出了加入補償算法前后的轉矩諧波分析,從圖中可看出,在未加入補償算法前,轉矩脈動存在二倍頻、四倍頻和六倍頻
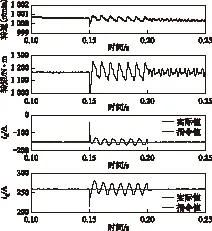
圖5 加入補償算法前后的轉速、轉矩和電流波形Fig.5 Speed,torque and current waves with and without compensation algorithm

圖6 轉矩脈動FFT分析Fig.6 FFT analysis of torque ripple
轉矩脈動,其主要是由于漏感及電流中的二次波動造成的,而加入補償算法后,轉矩中只存在四倍頻和六倍頻的轉矩脈動且幅值基本相等,其主要是由于五次諧波的影響,如式(36)所示,與理論分析一致。
3 實驗驗證與結果分析
為了驗證上述缺相故障的數(shù)學模型及容錯控制方法的正確性,在一臺雙Y移相30°六相永磁同步電機上進行實驗驗證,電機參數(shù)見表1,實驗臺架如圖7所示,采用將某一相繞組開路來模擬缺相故障;由于轉矩傳感器的采樣速度不足以采集轉矩脈動,所以此處采用轉速信號的波動來體現(xiàn)轉矩脈動;另外,由于基于載波的PWM(CPWM)是相調制方式[22],其尤為適合在缺相后的不平衡相電壓的調制,所以本文的容錯控制采用CPWM調制方式來實現(xiàn)逆變器的電壓調制,便于實現(xiàn)和工程應用。

圖7 實驗平臺照片F(xiàn)ig.7 The picture of test bench

參數(shù)數(shù)值參數(shù)數(shù)值Rs/Ω0.005λm1/Wb0.13284Ld1/mH0.3864λm5/Wb-0.00263Lq1/mH1.0388J/(kg·m2)0.01Lls/mH0.08極對數(shù)p4Ls5/mH0.1231
以F相繞組斷路來驗證一相繞組斷路容錯控制算法,系統(tǒng)的外環(huán)控制采用轉速控制,此時電機轉速脈動可體現(xiàn)轉矩脈動,設電機轉速為300 r/min,在圖8和圖9中,當F相繞組發(fā)生斷路時,首先不采用容錯控制算法,從圖8可知,此時轉速脈動較大,即轉矩脈動較大,電流含有大量諧波,而且從圖9可看出此時的交、直軸電流存在約20 A的波動,電機有異響;然后控制算法切換到無補償?shù)娜蒎e控制算法,此時未考慮電機漏感及空間諧波等非理想因素的影響,轉矩脈動減小約50%,交、直軸電流波動同樣減小為10 A;最后將算法切換到帶有前饋補償?shù)娜蒎e控制算法后,相電流的幅值和相位與理論分析基本一致,交、直軸電流進一步改善,已無明顯波動,驗證了本文對轉矩脈動的分析及相應容錯算法的正確性。

圖8 F相繞組斷路容錯控制時的相電流和轉速波形Fig.8 Phase currents and speed waves with fault-tolerant control for F phase winding failure
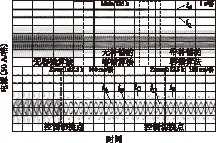
圖9 F相繞組斷路容錯控制時的id、iq和相電流波形Fig.9 id、iq and phase current waveforms with fault-tolerantcontrol for F phase winding failure
為了驗證容錯算法的動態(tài)性能,設定系統(tǒng)工作在轉矩環(huán)控制下,電機轉速為300 r/min,圖10為F相繞組斷路時,轉矩發(fā)生100%階躍的電流響應波形,從圖中可知,容錯控制后的系統(tǒng)具有較好的動態(tài)性能,可達到未發(fā)生繞組斷路故障的水平。
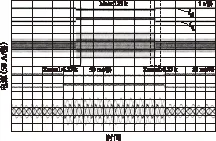
圖10 F相容錯控制下的轉矩階躍響應波形Fig.10 Current response waveforms of torque step with fault-tolerant control for F phase winding failure
圖11顯示了B相繞組發(fā)生斷路故障時容錯控制下的電流波形,此時的容錯控制是在F相繞組斷路的數(shù)學模型下獲得,各相電流的幅值和相位與理論分析一致,驗證了采用坐標軸旋轉來獲得任意相繞組斷路容錯控制方法的正確性。

圖11 B相容錯控制下的電流波形Fig.11 Currents waves with fault-tolerant control for B phase winding failure
4 結論
本文以中性點隔離的雙Y移相30°六相永磁同步電機為研究對象,對缺一相故障的容錯控制進行了研究,得到以下結論:
1)以銅耗最小為目標,通過優(yōu)化計算獲得六相永磁同步電機缺一相故障的優(yōu)化電流,保證故障前后的定子磁勢不變。
2)以優(yōu)化電流為基礎,得到此時的變換矩陣,從而推導獲得缺一相繞組的電機數(shù)學模型,從而提出相應的容錯控制算法,實現(xiàn)故障后的解耦矢量控制,實驗驗證了容錯控制方法的正確性。
3)在一相缺相的容錯控制基礎上,通過坐標變換可獲得其他相缺相時的容錯控制,并通過了實驗驗證。
4)分析了容錯控制下漏感和五次空間諧波對轉矩脈動的影響,通過補償可抑制漏感產生的轉矩脈動,但只能抑制五次空間諧波對電流的影響,無法完全消除其對轉矩脈動的影響。
[1] Mendes A M S,Cardoso A J M.Fault-tolerant operating strategies applied to three-phase induction-motor drives[J].IEEE Transactions on Industrial Electronics,2006,53(6):1807-1817.
[2] 劉自程,鄭澤東,彭凌,等.船舶電力推進中十五相感應電機同軸運行及容錯控制策略[J].電工技術學報,2014,29(3):65-74. Liu Zicheng,Zheng Zedong,Peng Ling,et al.Fixed joint double fifteen-phase induction motor control and fault-tolerant control in ship propulsion system[J].Transaction of China Electrotechnical Society,2014,29(3):65-74.
[3] Villani M,Tursini M,F(xiàn)abri G,et al.High reliability permanent magnet brushless motor drive for aircraft application[J].IEEE Transactions on Industrial Electronics,2012,59(5):2073-2081.
[4] Guohai L,Junqin Y,Wenxiang Z,et al.Design and analysis of a new fault-tolerant permanent-magnet vernier machine for electric vehicles[J].IEEE Transactions on Magnetics,2012,48(11):4176-4179.
[5] Aroquiadassou G,Mpanda M A,Betin F,et al.Six-phase induction machine drive model for fault-tolerant operation[C].IEEE International Symposium on Diagnostics for Electric Machines,Power Electronics and Drives,Cargese,F(xiàn)rance,2009:1-6.
[6] Demba D,Mohamed E H B,Abdessalam M.A fault-tolerant control architecture for induction motor drives in automotive applications[J].IEEE Transactions on Vehicular Technology,2004,53(6):1487-1495.
[7] Alcharea R,Nahidmobarakeh B,Baghli L,et al.Decoupling modeling and control of six-phase induction machines under open phase fault conditions[C].IECON 2006-32nd Annual Conference on IEEE Industrial Electronics,Paris,F(xiàn)rance,2006:5101-5106.
[8] Bianchi N,Bolognani S,Pré M D.Strategies for the fault-tolerant current control of a five-phase permanent magnet motor[J].IEEE Transactions on Industrial Application,2007,43(4):960-970.
[9] Jen-Ren F,Lipo T A.Disturbance-free operation of a multiphase current regulated motor drive with an opened phase[J].IEEE Transactions on Industry Applications,1994,30(5):1267-1274.
[10]Toliyat H A.Analysis and simulation of five-phase variable-speed induction motor drives under asymmetrical connections[J].IEEE Transactions on Power Electronics,1998,13(4):748-756.
[11]Parsa L,Toliyat H A.Fault-tolerant interior permanent magnet machines for hybrid electric vehicle applications[J].IEEE Transactions on Vehicular Technology,2007,56(4):1546-1552.
[12]Wang J,Atallah K,Howe D.Optimal torque control of fault tolerant permanent magnet brushless machines[J].IEEE Transactions on Magnetics,2003,39(5):2962-2964.
[13]Sun Z G,Wang J B,Jewell G W,et al.Enhanced optimal torque control of fault-tolerant PM machine under flux-weakening operation[J].IEEE Transactions on Industrial Electronics,2010,57(1):344-353.
[14]Zhao Y,Lipo T A.Modeling and control of a multi-phase induction machine with structural unbalance.Part I:Machine modeling and multi-dimensional current regulation[J].IEEE Transactions on Energy Conversion,1996,11(3):570-577.
[15]Zhao Y,Lipo T A,Modeling and control of a multi-phase induction machine with structural unbalance.Part Ⅱ:Field-oriented control and experimental verification[J].IEEE Transactions on Energy Conversion,1996,11(3):578-584.
[16]Hyung-Min R,Ji-Woong K,Seung-Ki S.Synchronous frame current control of multi-phase synchronous motor part ii-asymmetric fault condition due to open phases[C].Conference Record of the 2004 IEEE Industry Applications Conference,Seattle,Washington,USA,2004:268-275.
[17]周馬山,歐陽紅林,童調生,等.不對稱多相PMSM的矢量控制[J].電工技術學報,2004,19(12):37-41. Zhou Mashan,Ouyang Honglin,Tong Tiaosheng,et al.Vector control of multiphase PMSM with asymmetric structure[J].Transactions of China Electrotechnical Society,2004,19(12):37-41.
[18]歐陽紅林,周馬山,童調生.多相永磁同步電動機不對稱運行的矢量控制[J].中國電機工程學報,2004,24(7):145-150. Ouyang Honglin,Zhou Mashan,Tong Tiaosheng.Vector control of nulti-phase permanent magnet synchronous motor with asymmetric structure[J].Proceedings of the CSEE,2004,24(7):145-150.
[19]朱鵬,張曉峰,喬鳴忠,等.五相集中整距繞組感應電機缺相容錯控制[J].中國電機工程學報,2011,31(33):131-137. Zhu Peng,Zhang Xiaofeng,Qiao Mingzhong,et al.Tolerant control strategy for five-phase concentrated full-pitch windings induction motor under open phases fault[J].Proceedings of the CSEE,2011,31(33):131-137.
[20]楊金波,李鐵才,楊貴杰.一相開路雙三相永磁同步電機建模與控制[J].電工技術學報,2011,26(10):167-173. Yang Jinbo,Li Tiecai,Yang Guijie.Modeling and control of dual three-phase PMSM with one open phase[J].Transactions of China Electrotechnical Society,2011,26(10):167-173.
[21]薛山,溫旭輝,王又瓏.多相永磁同步電機多維控制技術[J].電工技術學報,2008,23(9):65-69. Xue Shan,Wen Xuhui,Wang Youlong.Multi-dimensional control in multiphase permanent motor drives[J].Transactions of China Electrotechnical Society,2008,23(9):65-69.
[22]Cursino B J,Antonio M N L,Edison R C da S,et al.Digital scalar pulse-width modulation:a simple approach to introduce non-sinusoidal modulating waveforms[J].IEEE Transaction on Power Electronics,2001,16(3):351-359.
The Fault-tolerant Control for Six-phase Permanent Magnet Synchronous Machines with One Phase Failure
WangYongxingWenXuhuiZhaoFeng
(Key Laboratory of Power Electronics and Electric Drive Institute of Electrical Engineering Chinese Academy of Sciences Beijing 100190 China)
In order to realize vector control of the six-phase permanent magnet synchronous machine (PMSM) with one phase failure,optimized currents of the six-phase PMSM containing double Y-connected phase-shift 30° windings with one phase failure are found based on the principle of the constant stator magnetic motive force concerning minimum copper loss.According to the optimized currents,the transformation matrix has been got to establish the mathematical model of the six-phase PMSM with one phase failure in the rotating coordinates.And thus the decoupling vector control method is proposed with one phase failure.Besides,the leakage inductance and the spatial harmonic which affect torque ripple in the fault-tolerant control are analyzed and the corresponding inhibitive method is provided.Experiments are carried out to verify the correctness of the fault-tolerant control for six-phase PMSM.The proposed fault-tolerant control method can reduce the torque ripple effectively and have a better dynamic performance,which ensures the reliability of the drive system.
Six-phase PMSM,fault-tolerant control,optimized currents,phase failure,torque ripple
國家自然科學基金重點項目(61034007)資助。
2014-11-09 改稿日期2014-12-30
TM315
王永興 男,1985年生,博士研究生,研究方向為電機運行理論及控制。(通信作者)
溫旭輝 女,1963年生,研究員,博士生導師,研究方向高功率密度電機驅動系統(tǒng)研究。