時柵位移傳感器網絡功能模型研究*
2015-03-26 08:00:04楊繼森江中偉冉揚潔李宏偉
傳感器與微系統 2015年3期
楊繼森,江中偉,冉揚潔,李宏偉
(重慶理工大學 機械檢測技術與裝備教育部工程研究中心,重慶400050)
0 引 言
第一代時柵位移傳感器根據“TST”原理,研究出第一臺時柵位移傳感器樣機,該樣機沒有數據傳輸端口僅僅是對“TST”原理的驗證;通過引入“場”的概念,時柵位移傳感器課題組成功研制出第二代時柵位移傳感器:場式時柵位移傳感器[1],第二代代產品主要用串口作為數據傳輸方式,在設定串行接口的波特為57 600 bps 時,場式時柵位移傳感器能夠滿足數據傳輸要求。隨著時柵位移傳感器動態測量技術的提升,提高時柵位移傳感器的激勵信號頻率成為一項關鍵的技術手段,但是激勵源信號頻率的增加,在時柵傳感器第二代產品中仍然用串行接口作為數據傳輸方式就不能滿足要求。通過德國Heidenhain 圓光柵數據傳輸方式—增量式接口的啟發,在第三代時柵傳感器數據傳輸部分加入了增量式接口。在第四代產品中采用USB 2.0 作為主要的數據傳輸方式。在激勵信號頻率為20,40 kHz時,USB 接口最大傳輸速率為480 Mbps,基本能夠滿足數據傳輸要求;但同時存在上位機開發難度大、USB 驅動程序復雜等不足。
本文提出采用網絡端口的方式進行數據傳輸,同時增加其遠程初始校驗與遠程故障診斷功能,將Internet 技術和時柵位移傳感器相融合,這種時柵位移傳感器模型可有效地進行故障診斷分析,減少客戶的故障損失,并可以更好地開展售后服務,促進了時柵位移傳感器的產業化發展。
1 uIP 協議分析
uIP 協議是一種使用于低至8 位或16 位微處理器的嵌入式系統的一個可實現的極小的TCP/IP協議棧[2]。本方案采用的是由瑞典計算機科學研究所Adam Dunkels 開發的uIP 1.0,它采用模塊化設計,其代碼量僅為幾千字節,只需要幾百字節的內存就可以順利運行,完全適應目前時柵位移傳感器的嵌入式系統,其結構示意圖如圖1 所示。

圖1 uIP 協議棧結構示意圖Fig 1 Structure diagram of uIP protocol stack
由圖1 可知,uIP 協議處于網絡通信的中間層。需要用戶為uIP 協議棧提供專用的定時器驅動程序和網卡驅動程序[3,4],uIP 協議則為底層系統提供了4 個接口函數:uIP_init(),uIP_input(),uIP_periodic()和uIP_udp_periodic()。它們的作用分別是:1)完成uIP 協議棧的初始化;2)處理接收到的ip 數據包;3)協議棧內核周期性地對各tcp 連接的輪詢,如果需要調用上層應用程序處理,則調用uIP_tcp_call();4)用于udp 服務下周期性地對各udp 連接的輪詢,如果需要調用上層應用程序處理,則調用uIP_udp_call()。其中,uIP_input()和uIP_periodic()在其協議的內部都采用同一個函數void uIP_process(u8_t flag)來實現,只是區別在于調用的參數不同[5]。
2 系統硬件
時柵位移傳感器整個電氣信號系統包括:勵磁信號產生模塊、微弱信號調理模塊和微控制器模塊。整個系統的設計方案是通過網絡控制芯片ENC28J60 接入網絡,具體結構如圖2 所示。

圖2 系統硬件框圖Fig 2 Hardware block diagram of system
2.1 信號系統模塊
時柵位移傳感器嵌入式信號系統模塊包括:微處理器模塊、勵磁信號產生模塊和弱信號調理模塊。微處理器模塊主要控制AD9959 產生三相勵磁信號和完成時柵位移傳感器感應信號的后處理(包括信號采集、誤差補償、信號轉換)[6];時柵位移傳感器的結構類似三相電機,當時柵位移傳感器引入三相激勵信號后,根據電磁原理,則會在時柵位移傳感器內部的定、轉子氣隙間形成一個磁行波,那么,傳感器測頭就會感應出感應信號。由于感應信號較弱就需要微弱信號調理模塊對感應信號進行調理(包括濾波、放大和整形)[7]。
2.2 網絡接口模塊
網絡接口芯片選用ENC28J60(Microchip 公司),它可作為任何配有SPI 的控制器的以太網接口,它是全球目前最小封裝的以太網控制器,且符合IEEE 802.3 的全部規范,支持一個帶自動極性檢測和校正的10BASE—T 端和支持全雙工和半雙工模式;8 kB 發送/接收數據包雙端口SRAM,可配置發送/接收緩沖器大小。同時還提供了一個內部DMA 以實現快速數據吞吐和硬件支持的IP 校驗和計算。與主控制器的通信通過兩個中斷引腳和SPI 實現,數據傳輸速率高達10 Mb/s[8]。硬件連接圖如圖3 所示。
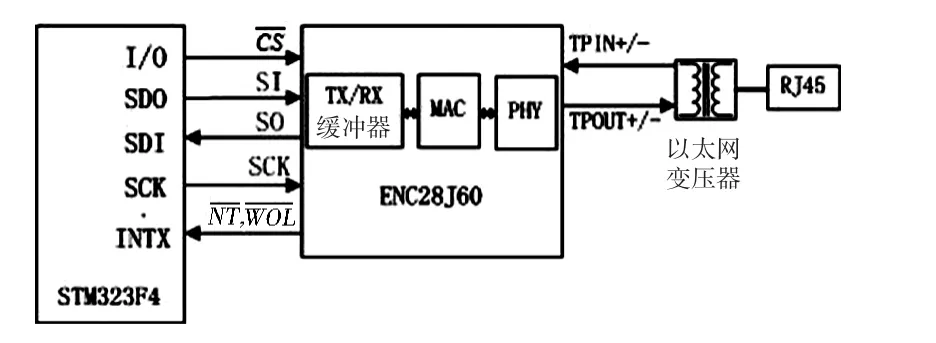
圖3 網絡控制器連接圖Fig 3 Connection diagram of network controller
3 網絡功能模型
本方案在原理上將沿襲“以時間測量空間”的思想,在功能結構上提出將uIP 引入時柵位移傳感器測量系統配合網絡算法,以實現時柵位移傳感器的信息化、智能化、網絡化;功能上實現時柵位移傳感器在線故障診斷、遠程初始校驗和大數據采集。
3.1 故障診斷和遠程校驗模型
儀器設備的在線故障診斷功能和遠程初始校驗功能已被廣泛接收和采用,并具有成熟的理論體系。本文提出在時柵位移傳感器中增加其在線故障診斷功能和遠程校驗功能,圖4 為時柵傳感器遠程故障診斷和遠程初始校驗模型。用戶在使用時柵位移傳感器時,控制系統通過對采集到的數據進行加密和封裝,利用Internet 傳送到生產商所在的產品服務器上,通過訪問故障特征知識庫進行查詢故障的來源和故障解決方式,然后再傳到用戶的時柵位移傳感器的控制電氣箱,以此達到在線故障診斷和遠程校驗的目的。
3.2 大數據采集

圖4 在線故障診斷框圖Fig 4 Block diagram of online fault diagnosis
本方案提出時柵位移傳感器的大數據采集模型。利用網絡協議對采集到的數據進行封裝并通過網絡接口直接發送給終端的算法模型,從而提高了數據采集的實時性和可靠性,其模型框圖如圖5 所示。從時柵位移傳感器電氣系統程序的應用中得到所需要采集的數據,并根據物理網絡上的傳輸需求進行轉換;經轉換的數據以bits 的形式在物理介質上傳輸;當數據到達上位機時,設備根據需求解除數據上的控制信息,并按一定的算法進行轉換[9~11]。
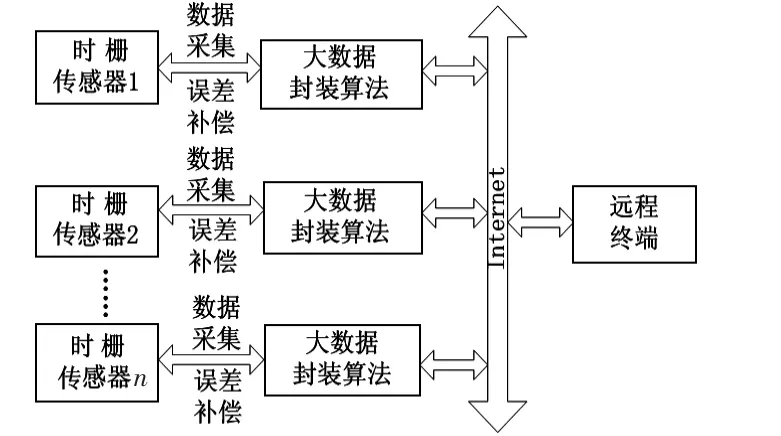
圖5 大數據采集框圖Fig 5 Block diagram of big data acquisition
4 軟件流程
4.1 時柵位移傳感器系統診斷流程圖
根據時柵位移傳感器的結構模型分析,時柵位移傳感器最主要的故障可分為三相激勵信號電壓頻率不等,電壓幅值不等和轉子感應信號電壓值異常。一旦出現上述故障后通過加密算法將異常值進行打包,然后通過網絡發送到廠家的產品服務器上,通過專家診斷系統進行故障診斷,以及時幫助用戶排除故障。圖6 所示為時柵位移傳感器故障診斷流程圖。
4.2 uIP 協議主程序流程
通過調用uIP_init()和enc28j60_init()函數對uIP 協議棧和網絡控制器ENC28J60 進行初始化,通過函數uIP_len()是否大于0,判斷網絡控制器接收的數據,如果大于0則通過函數uIP_input()處理IP 包;當uIP_input()函數返回,若有數據要發送,則發送數據包放在包緩沖區里。包的大小由全局變量uIP_len 指明。如果uIP_len 大于0,則調用網絡設備驅動發送數據包[12],其具體流程圖如圖7 所示。
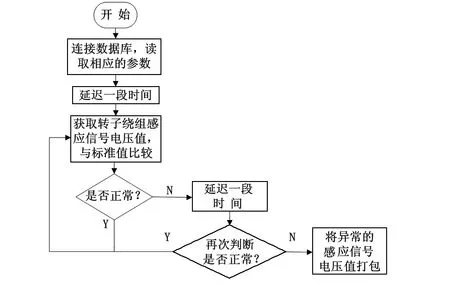
圖6 時柵位移傳感器故障診斷流程圖Fig 6 Fault diagnosis flow chart of time grating displacement sensor
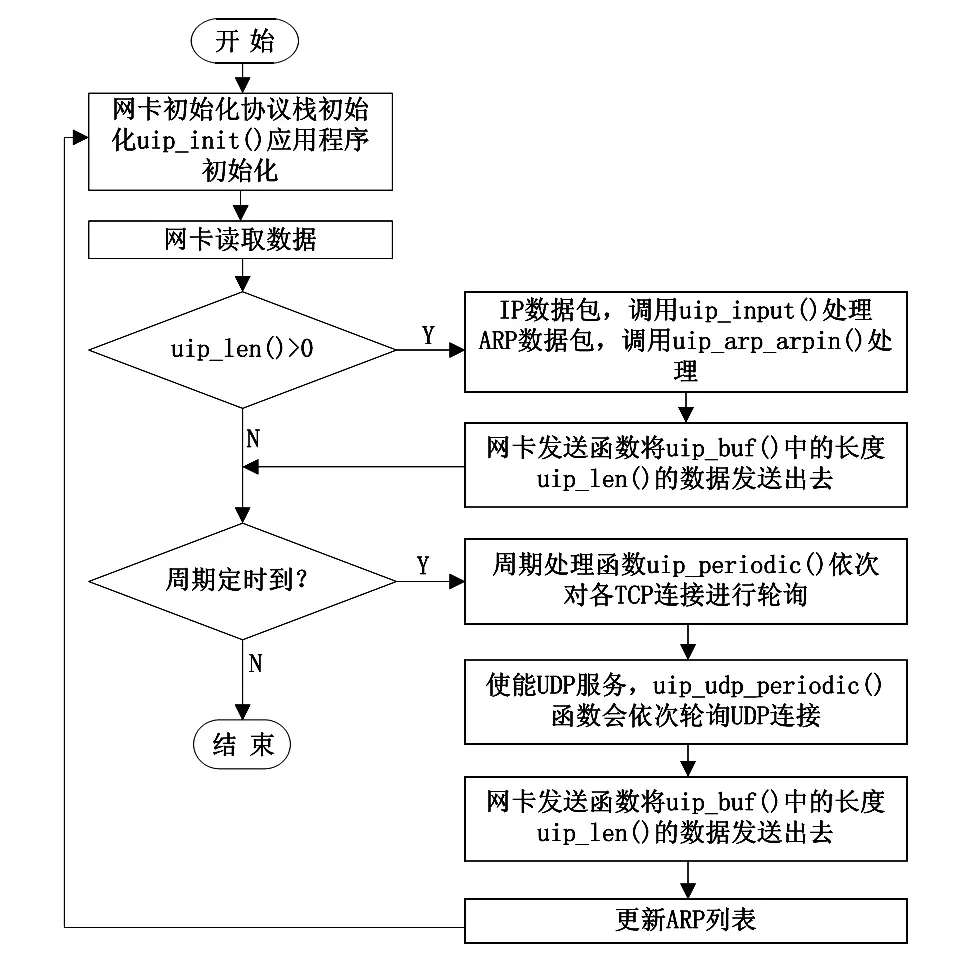
圖7 uIP 協議棧流程圖Fig 7 Flow chart of uIP protocol stack
5 實驗分析
本方案的實驗所搭建的實驗平臺圖如8 所示,時柵位移傳感器和光柵通過彈性聯軸器同軸安裝,時柵位移傳感器通過電氣系統引入激勵信號,然后通過上位機軟件進行大數據采集和故障分析。根據上述分析,時柵位移傳感器的主要故障來源于勵磁信號,具體包括三相勵磁信號幅值不等、相位不均分、信號短路。因此,通過時柵的電氣系統人為的引入故障信號,以提取時柵位移傳感器的感應信號。
圖9 為輸入的時柵激勵信號為:短路、幅值不等、相位不均分以及標準信號,所測得的感應信號。
由于時柵感應信號是一個連續的信號,對峰—峰值的提取有一定的困難,因此,將上述的信號進行傅里葉變化,如圖10 所示,從而可以有效提取激勵信號各種故障的幅值信號,有效地判斷故障的來源。

圖8 時柵系統實驗裝置Fig 8 Experimental apparatus of time grating system
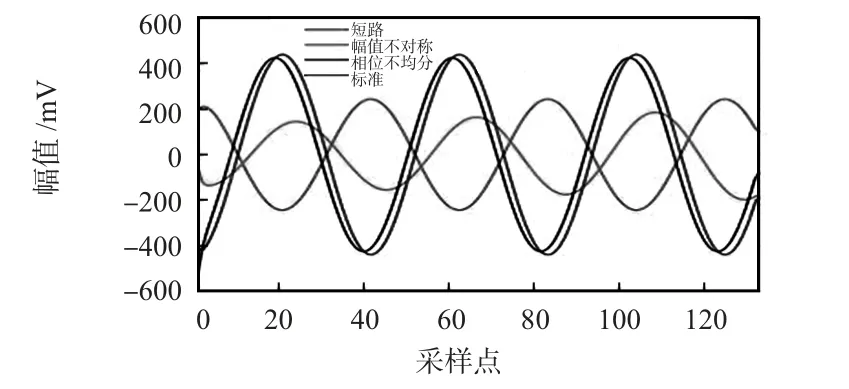
圖9 時柵位移傳感器感應信號Fig 9 Induced signals of time grating displacement sensor
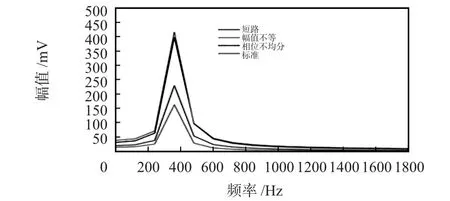
圖10 時柵位移傳感器感應信號幅度譜Fig 10 Induced signals amplitude spectrum of time grating displacement sensor
6 結束語
本文將uIP 協議棧同時柵位移傳感器嵌入式信號系統相結合,并選取合適的網卡控制器,進而到達了將時柵位移傳感器接入Internet 的目的。同時,論證了該方案在功能上實現時柵位移傳感器的在線故障診斷、遠程初始校驗和大數據的采集功能的可行性,并給出了一定的硬件框圖和軟件流程,對時柵位移傳感器提升產品競爭力和產業化發展具有重要意義。
[1] 彭東林,張興紅,劉小康.基于時空轉換的精密位移測量新方法與傳統方法的比較[J].儀器儀表學報,2006,27(4):423-426.
[2] 伊文斌,周賢娟,鄢化彪,等.uIP TCP/IP 協議分析及其在嵌入式系統中的應用[J].計算機技術與發展,2007,17(9):240-243.
[3] 王 琳.基于GPRS 的無線圖像數據傳輸[J].計算機工程,2008,34(13):232-233.
[4] 杜寶禎,吳志榮,曾 佳.基于uIP 與AJAX 的動態Web 服務器設計[J].單片機與嵌入式系統,2012(10):19-21.
[5] Adam Dunkels.The uIP embeded TCP/IP stack[EB/OL].[2012—05—12].http:∥www.sics.se/~adam/uIP.
[6] 楊繼森,江中偉,許 強,等.基于AD9959 與STM32 F4 的時柵位移傳感器電氣系統設計[J].傳感技術學報,2013(8):1050-1054.
[7] 鄭方燕,王寶珠.基于SOPC 的時柵位移傳感器信號處理系統設計[J].傳感技術學報,2012,25(10):1429-1432.
[8] 蔣 峰,朱俊杰.嵌入式網絡溫度測控系統[J].儀表技術與傳感器,2007(9):29-30,43.
[9] 何學明,陳學東,曾理湛,等.超精密氣浮平臺的定位精度分析[J].華中科技大學學報:自然科學版,2008,36(3):8-11.
[10]馬 巖,白雪峰,郝 鑫,等.基于神經網絡的劃片機光柵傳感器補償方法[J].儀表技術與傳感器,2013(6):121-123,127.
[11]Li Keqin.Downlink data transmission scheduling algorithms in wireless networks[J].Simulation Modelling Practice and Theory,2011,19(6):1427-1444.
[12]岳世為,尹為民.uIP 協議棧在基于DSP 以太網通信系統中的應用[J].計算機與數字工程,2010,38(1):186-189.
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
汽車維修與保養(2019年7期)2020-01-06 03:30:42
電子制作(2018年11期)2018-08-04 03:25:42
汽車維護與修理(2016年10期)2016-07-10 08:17:41
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
重慶工商大學學報(自然科學版)(2015年10期)2015-12-28 07:43:58
汽車維修與保養(2015年6期)2015-04-17 03:31:50
汽車維護與修理(2015年2期)2015-02-28 12:15:39
振動、測試與診斷(2014年5期)2014-03-01 01:14:21
