外骨骼機器人柔性變剛度驅(qū)動器設(shè)計
2015-03-23 11:28:38馬挺郭險峰
科技資訊 2014年35期
馬挺++郭險峰


摘 要:關(guān)節(jié)驅(qū)動器是外骨骼機器人的核心組成部分,目前傳統(tǒng)的剛性驅(qū)動器的缺點是:體積大、能耗多以及無法避免外界沖擊。為此該文提出一種全新的柔性變剛度驅(qū)動器,其基于彈簧的剛度控制,并對此柔性機構(gòu)進行了理論驗證,結(jié)果表明全新的柔性變剛度驅(qū)動器很好地解決了傳統(tǒng)剛性驅(qū)動器的主要缺點。
關(guān)鍵字:外骨骼 柔性變剛度驅(qū)動器 彈簧
中圖分類號:TP24 文獻標識碼:A 文章編號:1672-3791(2014)12(b)-0065-03
外骨骼原指為生物提供保護和支持的外部結(jié)構(gòu),外骨骼機器人可以理解為一種結(jié)合了人的智能和機器人機械能量的人機結(jié)合可穿戴裝備[1],可以增強穿戴者機能的一種裝備,包括機械結(jié)構(gòu)、相關(guān)制動器、彈性部件、傳感器和控制元件重量等,還遠遠達不到實際應(yīng)用的要求[2]。
如今,外骨骼機器人越來越多的應(yīng)用于輔助康復(fù)功能訓(xùn)練,患者通過穿戴外骨骼機器人,可以進行有效的功能康復(fù)訓(xùn)練,達到促進神經(jīng)系統(tǒng)功能恢復(fù)、提高日常生活活動能力的目的[2]。但是,目前絕大多數(shù)外骨骼機器人,包括BLEEX[3]、HAL[4]、LoKomat[5]等,其結(jié)構(gòu)均基于“電機+剛性傳動副”直接驅(qū)動各關(guān)節(jié)的方式,這種方式帶來的無法避免干擾和外界沖擊、體積較大以及耗能多等原理上的弊端,因此研究應(yīng)用于外骨骼機器人上的柔性驅(qū)動器顯得十分重要。該文將設(shè)計一種全新的、能夠使外骨骼機器人結(jié)構(gòu)輕巧的柔性驅(qū)動器,而且新的柔性驅(qū)動器具備吸收消減多余沖擊、減小電機能耗以及輔助出力的特點。
1 柔性驅(qū)動器的定義
傳統(tǒng)剛性驅(qū)動器的特點是,能夠到達特定的位置或者按照預(yù)先設(shè)定的軌跡運動,一旦到達指定位置,無論有無外界力施加于驅(qū)動器(外界力小于驅(qū)動器可承受的最大力),剛性驅(qū)動器都能保持在這一位置[6]。
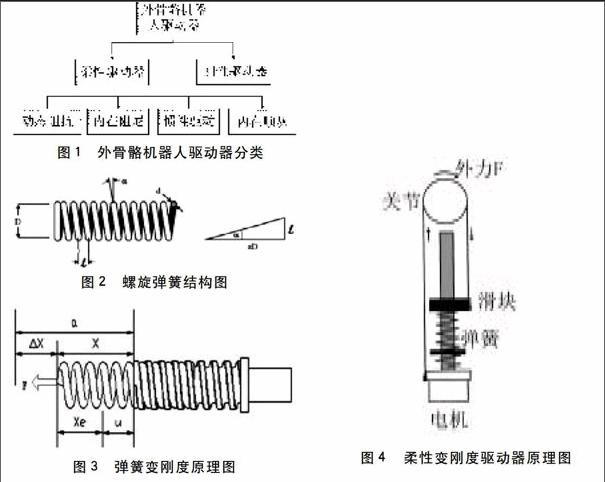
相反,柔性驅(qū)動器即使在到達指定位置后,也會因為外界對它施加的力,產(chǎn)生相對于自己平衡位置的位移。柔性機構(gòu)的平衡位置,一般定義為驅(qū)動器產(chǎn)生零力或者零力矩的位置[7]。其中,平衡位置的概念只存在于柔性驅(qū)動器,剛性驅(qū)動器并無平衡位置這一說法根據(jù)上述特點,將外骨骼機器人驅(qū)動器分為以下幾類,如圖1所示。
2 柔性變剛度驅(qū)動器的原理
2.1 彈簧的變剛度原理
如圖2為一個圓截面圓柱螺旋壓縮彈簧的結(jié)構(gòu)圖,圖中為彈簧的外徑,為彈簧的節(jié)距,為彈簧的螺旋角,為彈簧絲的直徑。彈簧的剛度系數(shù)[8],其中為彈簧剪切模量,為彈簧的有效圈數(shù)。如果想要改變彈簧的剛度,可以通過改變、、以及。
但是彈簧一旦設(shè)計加工完成,、、都均已固定,而有效圈數(shù)是彈簧成型后剛度可改變的量之一,也是最簡便的可改變量。因此該文的柔性驅(qū)動器就是通過改變彈簧的有效圈數(shù)來達到改變剛度的目的。
2.2 彈簧變剛度原理
該文柔性驅(qū)動器基于結(jié)構(gòu)控制剛度的概念[8]。其基本原理可以描述為:基于一個可以調(diào)整有效圈數(shù)的螺旋彈簧,通過增加或者減少彈簧的有效圈數(shù)來改變驅(qū)動器的柔順度。
因此柔性驅(qū)動器的剛度類似于線性彈簧。根據(jù)胡克定律,彈簧的應(yīng)力與應(yīng)變之間的關(guān)系為: 。
如果彈簧的自由長度等于實際長度,那么力為0。這種情況對應(yīng)于柔性驅(qū)動器的平衡位置。對于一個彈簧,平衡位置是固定的,等于彈簧的自由長度。然而,對于該文中柔性機構(gòu),可以通過改變彈簧的有效圈數(shù)來改變其自身的平衡位置。
圖3為彈簧的變剛度原理圖[9]。
如圖3所示,彈簧套于螺旋軸上,電機轉(zhuǎn)動帶動螺旋軸的轉(zhuǎn)動。當固定彈簧,使其無法旋轉(zhuǎn)時,螺旋軸的轉(zhuǎn)動將改變彈簧的有效圈數(shù),使得彈簧沿軸向前進或后退,整個工作過程類似于滾珠絲杠。其中為彈簧自由長度,為彈簧壓縮或者伸長后的長度,取彈簧上某點作為彈簧的零點,為彈簧零點相對于外界參考環(huán)境的偏移量,為彈簧末端相對于零點的位移。為彈簧壓縮量。
根據(jù)胡克定律,得到彈簧末端輸出力:
其中,因為彈簧幾何結(jié)構(gòu)和滾珠絲杠相同,且工作過程類似于滾珠絲杠,那么描述滾珠絲杠的數(shù)學(xué)模型可以用來描述這種彈簧。主要的區(qū)別在于,滾珠絲杠的導(dǎo)程固定不變,而彈簧的節(jié)距會因為外力的作用而發(fā)生變化。
那么在理想的情況下,電機力矩[10]為
其中為彈簧的外徑,為彈簧的螺旋角。
并將記為彈簧常量那么彈簧剛度,為彈簧的壓縮量,所以,而彈簧自由長度,那么電機力矩為所以推導(dǎo)得電機功率為
2.3 柔性變剛度驅(qū)動器的原理
如圖4所示,電機和減速器輸出的旋轉(zhuǎn)運動,通過螺旋軸帶動彈簧旋轉(zhuǎn),轉(zhuǎn)化為彈簧末端沿軸向的直線運動,彈簧末端的滑塊因此沿導(dǎo)軌進行上下的直線運動,然后通過鋼索,將滑塊的直線運動轉(zhuǎn)化為轉(zhuǎn)盤的轉(zhuǎn)動。因為轉(zhuǎn)盤與關(guān)節(jié)處相連,那么轉(zhuǎn)盤轉(zhuǎn)動將會帶動關(guān)節(jié)轉(zhuǎn)動。
3 柔性變剛度驅(qū)動器原理驗證
該文將柔性驅(qū)動器用于外骨骼機器人髖關(guān)節(jié)的轉(zhuǎn)動。
圖5為人體正常行走時髖關(guān)節(jié)的角度、力矩以及功率(設(shè)定步態(tài)周期為3.5 s,人體體重為80 kg)
分析髖關(guān)節(jié)的步態(tài),在人正常行走過程中,髖關(guān)節(jié)角度值呈正弦曲線變化,髖關(guān)節(jié)力矩在支撐初期為負值,而在支撐階段后期以及擺動階段初期為正值,是因為髖關(guān)節(jié)要產(chǎn)生正的力矩用以推動腿部前進進入擺動階段,在擺動階段后期,髖關(guān)節(jié)力矩為負值,則是由于髖關(guān)節(jié)要實現(xiàn)腿部減速完成腳跟著地動作。根據(jù)髖關(guān)節(jié)功率圖可知,髖關(guān)節(jié)在支撐階段儲存能量,在腳尖離地后釋放能量推動身體前行,其動作的兩個峰值功率分別出現(xiàn)在足跟著地前后和腳尖離地前后。但整個步態(tài)周期中,平均功率為正值。
根據(jù)公式,對于該文中的柔性機構(gòu),和屬于選定后就無法改變的量。
并且有兩個變量,若要實現(xiàn)在整個步態(tài)過程中的最優(yōu)化,必須選定其中的一個變量,現(xiàn)選定=3000,那么通過合理選擇就可以實現(xiàn)在整個步態(tài)過程中的最優(yōu)化,從而使得電機的峰值功率達到最小。endprint
圖6為電機功率峰值達到最小時和正常行走的髖關(guān)節(jié)功率對比圖。
分析圖6,正常行走的髖關(guān)節(jié)功率峰值為36 w、-13.5 w,如果采用傳統(tǒng)直流無刷電機加減速器直接驅(qū)動的方式,那么電機輸出的功率
最小為36 w,而采用柔性機構(gòu)后,驅(qū)動電機所需的輸出最大功率為25 w,減小了31%。電機所需的最大功率的減小,將會使得所選電機的尺寸更小。
采用柔性機構(gòu)后,一個步態(tài)周期的電機耗能對應(yīng)電機功率曲線下方的面積,為30 J,而傳統(tǒng)的直驅(qū)方式,一個步態(tài)周期的電機耗能為直驅(qū)電機功率絕對值曲線的面積,耗能為38 J,因此采用柔性機構(gòu)后耗能減小21%,由于外骨骼機器人一般均采用電池供電,那么這將有助于延長外骨骼機器人的使用時間。
4 結(jié)語
對于一個理想的柔性關(guān)節(jié)驅(qū)動機構(gòu),能夠消減外界沖擊、減小電機能耗以及輔助出力屬于最重要的特征。該文中所設(shè)計的柔性機構(gòu),相對于傳統(tǒng)的電機加減速器直接驅(qū)動的剛性驅(qū)動模式,電機峰值功率減小了31%,能耗減小了21%,并且彈簧能夠?qū)ν饨鐩_擊進行有效的緩沖,外骨骼機器人關(guān)節(jié)驅(qū)動器的以上這些特點,將極大地延長外骨骼機器人的工作時間以及增大外骨骼的活動范圍,提高外骨骼機器人在未知環(huán)境下的安全性。
參考文獻
[1] 蔡兆云,肖湘江.外骨骼機器人技術(shù)研究綜述[J].國防科技,2008(12):6-8.
[2] 柯顯信,陳玉亮,唐文彬.人體下肢外骨骼機器人的發(fā)展及關(guān)鍵技術(shù)分析[J]. 機器人技術(shù)與應(yīng)用,2009(6):28-32.
[3] Zoss A B, Kazerooni H,Chu A. Biomechanical design of the Berkeley lower extremity exoskeleton (BLEEX)[J]. Mechatronics,IEEE/ASME Transactions on,2006,11(2):128-138.
[4] Sankai Y. Hal: Hybrid assistive limb based on cybernics[M]//Robotics Research. Springer Berlin Heidelberg, 2011:25-34.
[5] Jezernik S, Colombo G, Keller T, et al. Robotic orthosis lokomat: A rehabilitation and research tool[J]. Neuromodulation:Technology at the neural interface,2003,6(2):108-115.
[6] 樊曉平,徐建閩.柔性機器人的動力學(xué)建模及其控制[J].控制理論與應(yīng)用, 1997,14(3):318-329.
[7] 黃則兵,葛文杰,馬利娥.柔性機構(gòu)的研究現(xiàn)狀及其在仿生領(lǐng)域的應(yīng)用前景[J].機械設(shè)計與研究,2004(z1):279-282.
[8] 張英會,劉輝航,王德成.彈簧手冊[M].北京:機械工業(yè)出版社,1997.
[9] Hollander K W, Sugar T G, Herring D E. Adjustable robotic tendon using a'JackSpring'[C]//Rehabilitation Robotics, 2005. ICORR 2005.9th International Conference on.IEEE,2005:113-118.
[10] 楊祖孝.進給滾珠絲杠副傳動剛度的計算[J].制造技術(shù)與機床,1999(7):12-14.endprint
