船舶翼帆回轉(zhuǎn)速度的非線性補(bǔ)償控制
2015-03-23 06:56:48趙志強(qiáng)閆亞勝黃連忠馬冉祺馮寶輝
哈爾濱工程大學(xué)學(xué)報(bào) 2015年10期
關(guān)鍵詞:實(shí)驗(yàn)
趙志強(qiáng),閆亞勝,黃連忠,馬冉祺,馮寶輝
(大連海事大學(xué)輪機(jī)工程學(xué)院,遼寧大連116026)
風(fēng)力作為帆船的驅(qū)動力,在帆船自產(chǎn)生到發(fā)展過程中一直扮演著重要的角色。國內(nèi)外對風(fēng)帆助航技術(shù)的實(shí)用化和新型風(fēng)帆的探索研究取得了長足的進(jìn)步,如“新愛德丸”號的圓弧形硬質(zhì)帆、Alcyone號的渦輪帆、“白鯨天帆”等,而與新帆型匹配的驅(qū)動機(jī)構(gòu)要完成精確、穩(wěn)定和安全的轉(zhuǎn)帆功能,其設(shè)計(jì)和研究具有十分重要的意義[1-4],如“新愛德丸”號硬質(zhì)帆采用計(jì)算機(jī)控制,通過桅桿中的電磁閥精確調(diào)整帆角到最佳狀態(tài),從而輔助推動船舶[5]。
為實(shí)現(xiàn)控制其精確回轉(zhuǎn)到最佳帆向角從而給船舶提供最佳輔助推力,設(shè)計(jì)并搭建翼帆回轉(zhuǎn)液壓實(shí)驗(yàn)臺進(jìn)行實(shí)驗(yàn)研究[2-3,6]。在實(shí)驗(yàn)中翼帆回轉(zhuǎn)的起動加速、制動減速過程具有嚴(yán)重的非線性,造成難以精確控制、轉(zhuǎn)帆精度不高等問題。因此,將對液壓實(shí)驗(yàn)臺驅(qū)動翼帆回轉(zhuǎn)的閥控型開式液壓系統(tǒng)建模分析,采用對比例調(diào)速閥進(jìn)行非線性補(bǔ)償控制的實(shí)驗(yàn)研究方法,使翼帆回轉(zhuǎn)升、降速過程轉(zhuǎn)速均趨于線性,有利于實(shí)現(xiàn)精確控制轉(zhuǎn)帆機(jī)構(gòu)。
1 翼帆回轉(zhuǎn)實(shí)驗(yàn)臺結(jié)構(gòu)及工作原理
翼帆(風(fēng)洞試驗(yàn)襟翼帆模型如圖1)回轉(zhuǎn)是全方位精確旋轉(zhuǎn),實(shí)驗(yàn)臺采用低速大扭矩馬達(dá)-減速齒輪-加載器(模擬翼帆受力)的結(jié)構(gòu)[7],如實(shí)物圖2所示,其結(jié)構(gòu)原理如圖3所示。
圖1 襟翼帆模型Fig.1 Wing-sail model
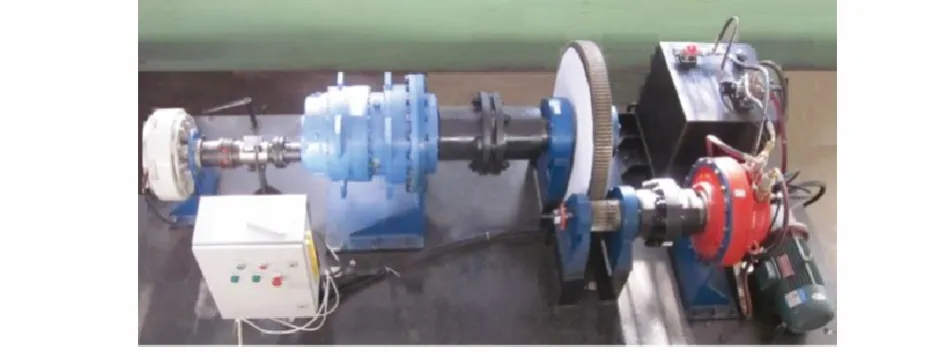
圖2 翼帆回轉(zhuǎn)液壓實(shí)驗(yàn)臺Fig.2 Wing-sail slewing hydraulic experimental table
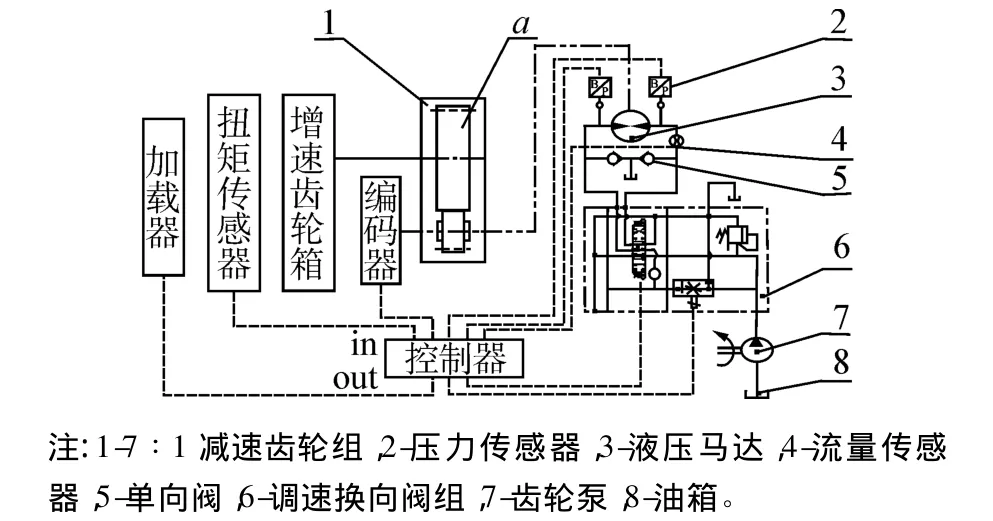
圖3 翼帆回轉(zhuǎn)實(shí)驗(yàn)臺原理圖Fig.3 Wing-sail slewing table schematic diagram
工作原理為:閥控開式液壓系統(tǒng)中定量泵為動力源,定量馬達(dá)為執(zhí)行元件,換向閥控制翼帆回轉(zhuǎn)平臺的左右回轉(zhuǎn);通過對比例調(diào)速閥施加一定的控制信號,調(diào)節(jié)系統(tǒng)液壓油流量改變翼帆回轉(zhuǎn)轉(zhuǎn)速;翼帆所受的回轉(zhuǎn)力矩由加載器模擬施加。
2 調(diào)速閥非線性補(bǔ)償控制
2.1 補(bǔ)償算法分析
首先對液壓馬達(dá)轉(zhuǎn)速和調(diào)速閥電流的關(guān)系進(jìn)行數(shù)學(xué)分析,液壓馬達(dá)的轉(zhuǎn)速ω和轉(zhuǎn)角θ為
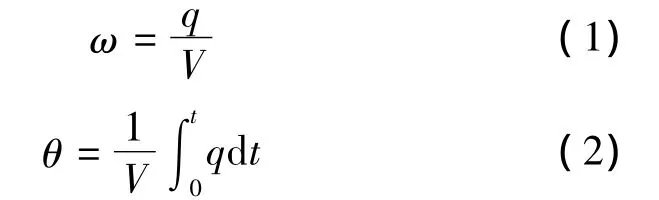
式中:q為馬達(dá)液壓油流量,V為馬達(dá)單位轉(zhuǎn)角排量。
流量控制閥是在一定的工作壓差Δp下,通過閥口(節(jié)流口)通流面積A(x)的改變來實(shí)現(xiàn)對流量q的控制,遵照閥口流量公式:

式中:aD為流量系數(shù),可以近似為常數(shù);A(x)為通流面積;ρ為油液密度。
作為壓力補(bǔ)償器的定差溢流閥,保持節(jié)流閥口的工作壓差近似為一定值,使三通比例流量閥的輸出流量q僅與通流面積A(x)有關(guān):

式中:x為閥芯位移,d為節(jié)流孔直徑。
由比例電磁鐵直接驅(qū)動閥芯時,如果忽略電磁鐵和閥芯運(yùn)動時所受的摩擦阻力及液壓卡緊力,則其穩(wěn)態(tài)平衡方程如下:

式中:KI、Kx為電磁鐵的電流力增益和位移力增益,I、Ia為控制電流及起始電流,Krx為復(fù)位彈簧剛度,x0為預(yù)壓縮量,F(xiàn)f為穩(wěn)態(tài)液動力。
通常情況下,Kx?Krx,因此式(5)可改寫為

若不計(jì)液動力Ff,則閥芯位移x與輸入控制電流成正比。
由以上分析及數(shù)學(xué)計(jì)算[8],比例調(diào)速閥的磁滯現(xiàn)象、閥口流通面積等非線性因素均可以導(dǎo)致轉(zhuǎn)速非線性的產(chǎn)生,通過上述分析最終可以歸納為轉(zhuǎn)速ω與控制電流I具有一定的非線性函數(shù)關(guān)系(如圖4)。
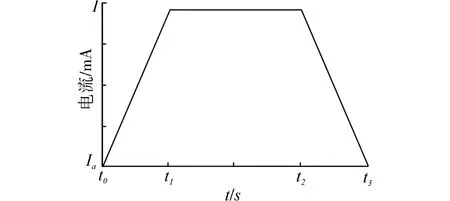
圖4 控制信號形式Fig.4 Control signal on speed regulating valve
實(shí)驗(yàn)設(shè)計(jì)采用線性控制信號起動和制動的方式[9],對翼帆的起動、制動轉(zhuǎn)速和對應(yīng)的調(diào)速閥電流進(jìn)行多次測量,得到如圖5所示的轉(zhuǎn)速與調(diào)速閥電流關(guān)系曲線。
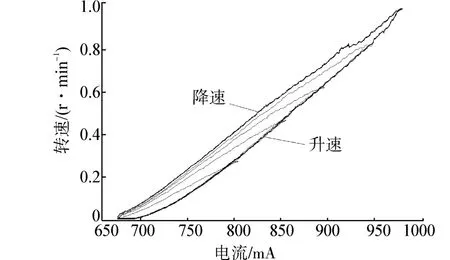
圖5 轉(zhuǎn)速-電流關(guān)系曲線Fig.5 Slewing speed against current curves
從圖中5條不同折返曲線中可以看出,升速曲線明顯呈非線性增長;各降速曲線基本呈線性狀態(tài),然而同一控制電流對應(yīng)的轉(zhuǎn)速均高于升速工況。實(shí)驗(yàn)表明,如果輸入電流是從最小值開始,直至升速結(jié)束,那么不同折返轉(zhuǎn)速的升速曲線合而為一且唯一確定,其數(shù)學(xué)模型可以表示為

實(shí)驗(yàn)也表明,如果降速過程是從某一折返點(diǎn)開始,則其降速曲線也是唯一確定的,其數(shù)學(xué)模型可以表示為

式中:φk、γk、φ、γ為各項(xiàng)系數(shù),由實(shí)驗(yàn)確定;m為階數(shù)[10-11]。
通過實(shí)驗(yàn)得到各個轉(zhuǎn)速工況下的升速、降速曲線數(shù)學(xué)模型,對系統(tǒng)采用開環(huán)控制,利用逆函數(shù)方法對其進(jìn)行線性化補(bǔ)償,如圖6所示,設(shè)目標(biāo)轉(zhuǎn)速為R(I),實(shí)際輸出為R'(I),ω(I)為轉(zhuǎn)速模型函數(shù),ω-1(I)為其逆函數(shù),則補(bǔ)償電流可以表示為

系統(tǒng)實(shí)際輸出

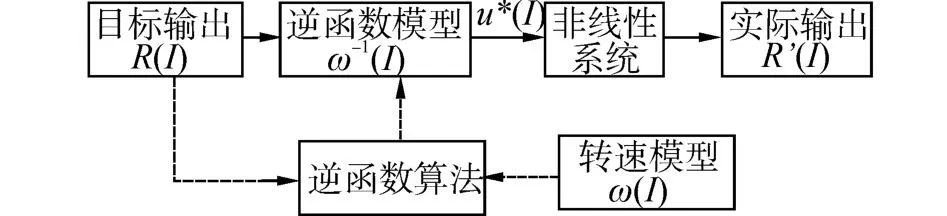
圖6 轉(zhuǎn)速-電流關(guān)系曲線Fig.6 Slewing speed against current curves
根據(jù)轉(zhuǎn)速的期望輸出R(I)反求系統(tǒng)輸入u*(I),使轉(zhuǎn)速在該補(bǔ)償電流作用下的實(shí)際輸出R'(I)盡量接近期望輸出R(I)[12]。
2.2 調(diào)速閥非線性補(bǔ)償控制實(shí)驗(yàn)
實(shí)驗(yàn)液壓控制系統(tǒng)總框架圖如圖7所示,上位機(jī)(PC機(jī))將程序下載到下位機(jī)控制器并向控制器發(fā)出啟動指令;下位機(jī)控制器將輸出控制電流信號傳輸給調(diào)速器電磁閥,調(diào)節(jié)調(diào)速閥的閥芯位移,改變流量,進(jìn)而改變馬達(dá)轉(zhuǎn)速;編碼器將馬達(dá)輸出端角度編碼值傳回控制器,經(jīng)過運(yùn)算得到角速度值,在上位機(jī)程序中顯示并存儲。

圖7 實(shí)驗(yàn)控制框架圖Fig.7 Frame diagram of control experiment
實(shí)驗(yàn)中對翼帆最高回轉(zhuǎn)速度為2、4、6(°)·s-13種工況進(jìn)行升速、降速的補(bǔ)償控制,得到3種速度在不同時域內(nèi)(3.5 s和20 s)的升速、降速曲線如圖8~10所示。
運(yùn)用MATLAB中向量相關(guān)度corrcoef函數(shù),求得各轉(zhuǎn)速在起動、制動時間為20 s的補(bǔ)償前后轉(zhuǎn)速曲線與直線y=x(起動)或y=-x(制動)的線性相關(guān)度結(jié)果如表1所示,從各個圖中及表1的結(jié)果中可以得出如下結(jié)論:
1)經(jīng)過非線性補(bǔ)償控制的升速曲線,不論最高轉(zhuǎn)速是多大,不論升速/降速用時多長,都趨近于直線增長,線性相關(guān)度(基本大于0.998 0)均高于未補(bǔ)償?shù)纳偾€,完全優(yōu)于未補(bǔ)償?shù)纳龠^程;
2)降速過程補(bǔ)償前后轉(zhuǎn)速曲線的線性度相差無幾,補(bǔ)償后略高;但原轉(zhuǎn)速下降緩慢,最終在調(diào)速閥關(guān)閉時陡降;補(bǔ)償后降速曲線斜率絕對值變大,速度下降更快,改善了制動結(jié)束時速度陡降。

圖8 2(°)·s-1補(bǔ)償前后起動和制動過程轉(zhuǎn)速對比Fig.8 2(°)·s-1starting and braking process slewing speed comparison before and after compensation
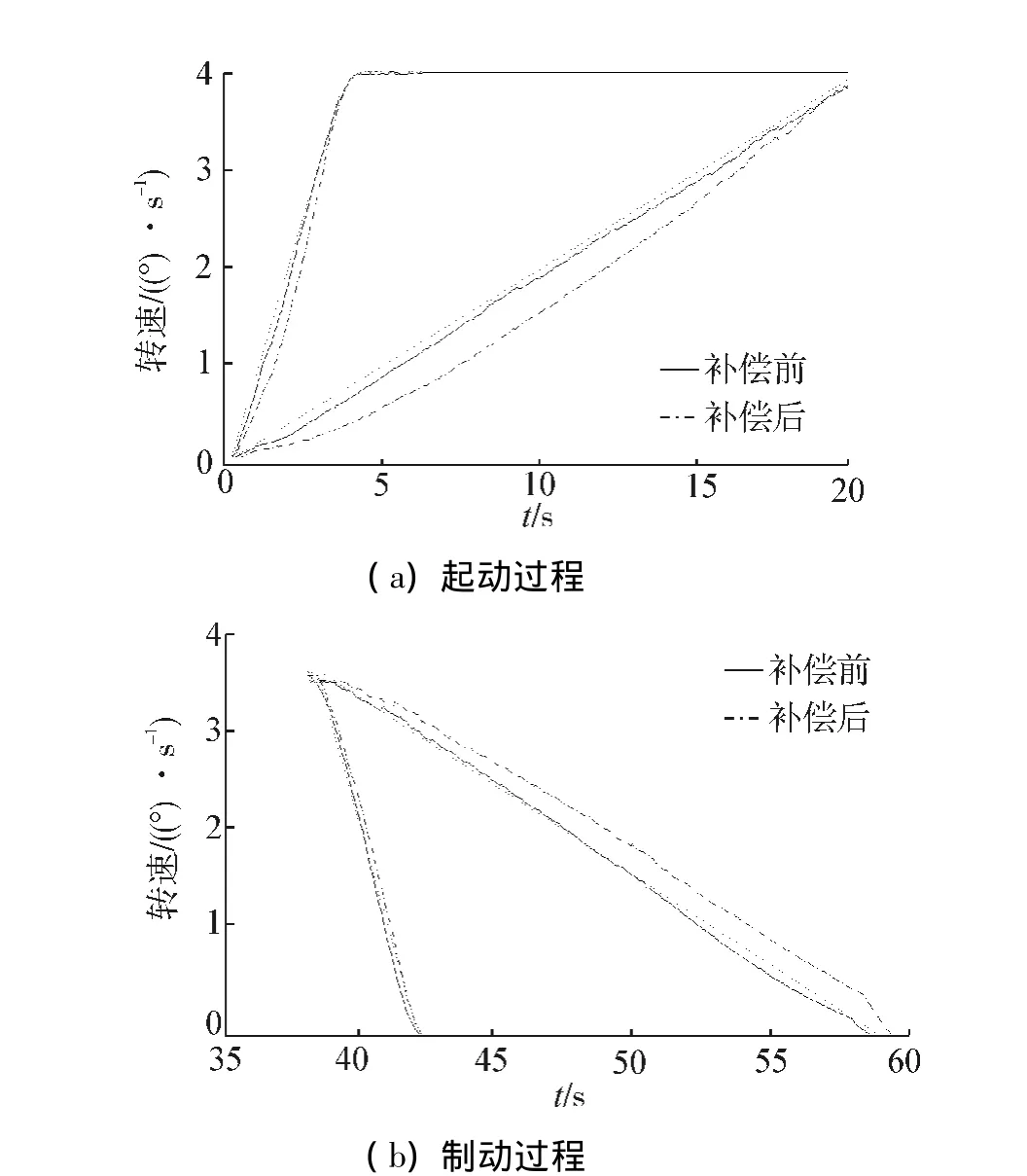
圖9 4(°)·s-1補(bǔ)償前后起動和制動過程轉(zhuǎn)速對比Fig.9 4(°)·s-1starting and braking process slewing speed comparison before and after compensation
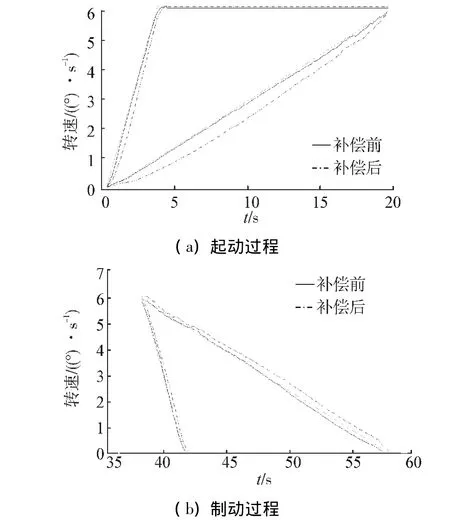
圖10 6(°)·s-1補(bǔ)償前后起動和制動過程轉(zhuǎn)速對比Fig.10 6(°)·s-1starting and braking process slewing speed comparison before and after compensation

表1 時域20 s補(bǔ)償前后轉(zhuǎn)速直線相關(guān)度Table 1 20 s time-domain slewing speed linear correlation before and after compensation
此外,對調(diào)速閥電流信號進(jìn)行補(bǔ)償后,提高了轉(zhuǎn)帆精度,補(bǔ)償前后轉(zhuǎn)帆角度對比如表2所示。從表中數(shù)據(jù)可以看出,未補(bǔ)償?shù)目刂七^程,轉(zhuǎn)帆誤差在-2.93~-0.56°,大部分工況的誤差都已經(jīng)高出1°;經(jīng)過補(bǔ)償控制的轉(zhuǎn)帆誤差,介于-0.99°和-0.26°之間,大大提高了轉(zhuǎn)帆精度。
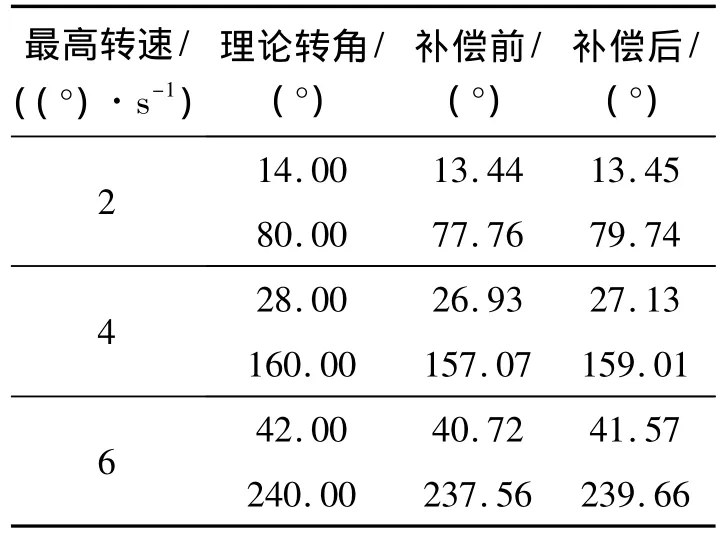
表2 補(bǔ)償前后轉(zhuǎn)帆角度數(shù)據(jù)表Table 2 Slewing angle accuracy comparison before and after compensation
2.3 補(bǔ)償控制后壓力特性實(shí)驗(yàn)
經(jīng)過前期仿真、實(shí)驗(yàn)研究,風(fēng)翼回轉(zhuǎn)液壓實(shí)驗(yàn)臺的起動、制動控制采用正弦控制信號,即控制電流應(yīng)以正弦規(guī)律增長/減小,其起動、制動過程壓力特性最佳,對液壓系統(tǒng)沖擊最小[3]。對調(diào)速閥進(jìn)行非線性補(bǔ)償控制后,其起動、制動壓力特性分別如圖11所示。
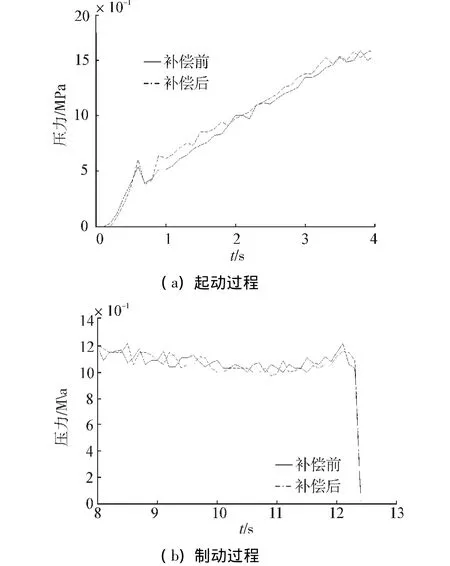
圖11 補(bǔ)償前后起動和制動特性Fig.11 Starting and braking process feature comparison
3 結(jié)論
1)通過對翼帆回轉(zhuǎn)實(shí)驗(yàn)臺的閥控調(diào)速開式液壓系統(tǒng)的分析及實(shí)驗(yàn)研究,得到了翼帆轉(zhuǎn)速與比例調(diào)速閥電流的非線性函數(shù)關(guān)系,并通過實(shí)驗(yàn)數(shù)據(jù)分別建立了升速、降速過程的轉(zhuǎn)速-電流數(shù)學(xué)模型及其逆模型;
2)采用逆模型前饋非線性補(bǔ)償方法對調(diào)速閥的控制電流進(jìn)行補(bǔ)償控制,使用開環(huán)控制系統(tǒng)對翼帆回轉(zhuǎn)速度非線性補(bǔ)償進(jìn)行實(shí)驗(yàn)研究,結(jié)果表明,該方法提高了轉(zhuǎn)速的直線度和轉(zhuǎn)帆精度,直線度誤差在2‰以內(nèi),翼帆轉(zhuǎn)角誤差均在1°以內(nèi);
3)使用補(bǔ)償手段,在正弦信號控制下,起動加速、制動減速過程中系統(tǒng)壓力特性基本不變;
4)本文采用的逆函數(shù)補(bǔ)償控制是前饋補(bǔ)償控制的關(guān)鍵步驟,經(jīng)過分析和實(shí)驗(yàn)研究,這種補(bǔ)償控制對于翼帆回轉(zhuǎn)精度的提高,乃至閥控調(diào)速型液壓系統(tǒng)的精度的提高都具有十分重要的意義。為了使轉(zhuǎn)帆過程更加精確,可對前饋、反饋或者兩者混合控制進(jìn)行深入研究。
[1]李元奎,張英俊,孫培廷,等.船舶典型遠(yuǎn)洋航線上風(fēng)力資源時空分布特征[J].大連海事大學(xué)學(xué)報(bào),2010,36 (2):39-41,46.
LI Yuankui,ZHANG Yingjun,SUN Peiting,et al.Temporal and spatial distribution of wind resources around the typical ocean routes[J].Journal of Dalian Maritime University,2010,36(2):39-41,46.
[2]王宏明,孫培廷,黃連忠,等.基于翼型理論的風(fēng)帆助航技術(shù)分析[J].船舶工程,2011,33(3):34-37.
WANG Hongming,SUN Peiting,HUANG Lianzhong,et al.The analysis of sail-assisted ship based on aerofoil theory[J].Ship Engineering,2011,33(3):34-37.
[3]劉緒儒.風(fēng)翼回轉(zhuǎn)液壓系統(tǒng)特性研究[D].大連:大連海事大學(xué),2013:2-3,46-48.
LIU Xuru.Characteristic research on slewing hydraulic system of wing-sail[D].Dalian:Dalian Maritime University,2013:2-3,46-48.
[4]林煜翔.風(fēng)力助航船舶襟翼帆的設(shè)計(jì)研究[D].大連:大連海事大學(xué),2013:2-5,13-15.
LIN Yuxiang.Design and research of flap wing sail for windassisted vessel[D].Dalian:Dalian Maritime University,2013:2-5,13-15.
[5]入沢登美男,王寶姊.裝帆商船“新愛德丸”的液壓系統(tǒng)[J].國外艦船技術(shù):特輔機(jī)電設(shè)備類,1985(5):25-28,41.
TOMIO I,WANG Baozi.The hydraulic system of sail-assisted merchant ship"New AiToku Maru"[J].Foreign Ship Technology:Special Auxiliary Electro-mechanical Equipment,1985(5):25-28,41.
[6]王國峰,趙永生,范云生.風(fēng)速風(fēng)向測量誤差補(bǔ)償算法的研究[J].儀器儀表學(xué)報(bào),2013,34(4):786-790.
WANG Guofeng,ZHAO Yongsheng,F(xiàn)AN Yunsheng.Research on error compensation algorithm for wind speed and direction measurement[J].Chinese Journal of Scientific Instrument,2013,34(4):786-790.
[7]劉緒儒,黃連忠,林煜翔,等.基于AMESim船舶風(fēng)翼回轉(zhuǎn)液壓系統(tǒng)仿真分析[J].液壓氣動與密封,2013(4): 30-34.
LIU Xuru,HUANG Lianzhong,LIN Yuxiang,et al.Analysis of wing-sail hydraulic slewing system based on AMESim[J].Hydraulics Pneumatics and Seals,2013(4):30-34.
[8]吳根茂,王慶豐,魏建華,等.新編實(shí)用電液比例技術(shù)[M].杭州:浙江大學(xué)出版社,2006:24,155-157.
WU Genmao,WANG Qingfeng,WEI Jianhua,et al.Electrohydraulic proportional technique in theory and application[M].Hangzhou:Zhejiang University Press,2006:24,155-157.
[9]趙志強(qiáng),馬冉祺,馮寶輝,等.基于AMESim風(fēng)翼回轉(zhuǎn)液壓系統(tǒng)動態(tài)響應(yīng)分析[J].大連海事大學(xué)學(xué)報(bào),2014,40 (1):66-69.
ZHAO Zhiqiang,MA Ranqi,F(xiàn)ENG Baohui,et al.Dynamic response of wing-sail slewing hydraulic system based on AMESim[J].Journal of Dalian Maritime University,2014,40(1):66-69.
[10]JUNG S B,KIM S W.Improvement of scanning accuracy of PZT piezoelectric actuators by feed-forward model-reference control[J].Precision Engineering,1994,16(1): 49-55.
[11]張?jiān)迹瑒⑿溃郊訉殻?壓電陶瓷的磁滯現(xiàn)象對位移精度的影響[J].制造技術(shù)與機(jī)床,1998(4):7-8,39.
ZHANG Yuanliang,LIU Xin,F(xiàn)ANG Jiabao,et al.Hysteresis effect of piezoelectric ceramics on displacement accuracy[J].Manufacturing Technology&Machine Tool,1998(4):7-8,39.
[12]舒亮,陳定方,盧全國.一種新的磁滯非線性前饋補(bǔ)償算法[J].自動化學(xué)報(bào),2009,35(7):953-958.
SHU Liang,CHEN Dingfang,LU Quanguo.A novel algorithm of nonlinear hysteresis feedforward compensation[J].Acta Automatica Sinica,2009,35(7):953-958.
猜你喜歡
作文·小學(xué)低年級(2025年2期)2025-02-13 00:00:00
小雪花·小學(xué)生快樂作文(2024年11期)2024-12-31 00:00:00
作文·小學(xué)低年級(2024年2期)2024-04-29 00:00:00
作文·小學(xué)低年級(2023年3期)2023-04-29 00:00:00
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
小主人報(bào)(2022年4期)2022-08-09 08:52:06
中學(xué)生數(shù)理化·中考版(2022年11期)2022-02-16 07:01:20
小哥白尼(趣味科學(xué))(2019年6期)2019-10-10 01:01:50
發(fā)明與創(chuàng)新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
