氣路閉環橫向互聯空氣懸架車身高度調節
2015-03-19 08:24:30江洪楊勇福余鵬飛徐興李美
北京航空航天大學學報 2015年11期
關鍵詞:系統
江洪,楊勇福,余鵬飛,徐興,李美
(1.江蘇大學機械工程學院,鎮江 212013;2.江蘇大學 汽車工程研究院,鎮江 212013;3.海南大學 機電工程學院,海口 570228)
隨著汽車技術的發展,在傳統空氣懸架基礎上出現的新型互聯空氣懸架結構,能更好地滿足人們對乘坐舒適性和操縱穩定性的需求.目前對互聯懸架的研究主要集中于連通式的油氣彈簧懸架[1],而互聯空氣懸架相關的研究與應用卻不多見.互聯空氣懸架將傳統空氣懸架中相鄰的空氣彈簧用氣動管路相連接,當受到路面沖擊時,互聯空氣彈簧間發生氣體交換,可起到緩和路面沖擊、保持車身姿態等作用[2-3].按照管路連接方式的不同,可以分為橫向互聯、縱向互聯等互聯結構形式.對于轎車、越野車等中小型車輛而言,由于車身空間有限,不可能布置較長較粗的管路,橫向互聯結構更容易實現[4].
近年來一些學者對車輛氣動系統的節能方面進行了初步探索,在傳統開環懸架系統的基礎上提出的閉環懸架系統,可以有效地減少能量損失并降低空氣彈簧排氣時造成的噪聲污染[5-6].高低壓罐氣路閉環空氣懸架車身高度調節系統則是在單體儲氣罐的基礎上通過添設低壓罐,將車身高度降低時空氣彈簧排出的高壓氣體儲存起來,避免高壓氣體直接排放到大氣中造成氣體能量的損耗.高壓罐則為空氣彈簧充氣時提供高壓氣源.利用“高壓罐-空氣彈簧-低壓罐-空壓機-高壓罐”的氣路閉環結構,可以有效改善車身高度調節性能,同時減少車身高度調節過程中的能量損耗.
結合橫向互聯空氣懸架系統與高低壓罐氣路閉環空氣懸架系統兩方面的優點,提出氣路閉環橫向互聯空氣懸架系統.目前對車身高度控制的研究多集中在非互聯懸架系統領域,而傳統空氣懸架車身高度控制策略應用于互聯懸架存在移植性缺陷,難以充分發揮氣路閉環橫向互聯空氣懸架系統的優點.本文對傳統比例積分微分(PID)控制策略進行改進,形成專門適用于橫向互聯懸架車身高度調節的比例積分微分-脈沖寬度調制(Proportion Integration Differentiation-Pulse-Width Modulation,PIDPWM)控制策略,用以解決調節時間過長、超調現象明顯等問題.對控制策略的實際控制效果進行驗證,進行仿真與試驗研究,并分析儲氣罐不同初始氣壓對車身高度調節時間與誤差的影響.
1 系統設計
1.1 系統工作原理
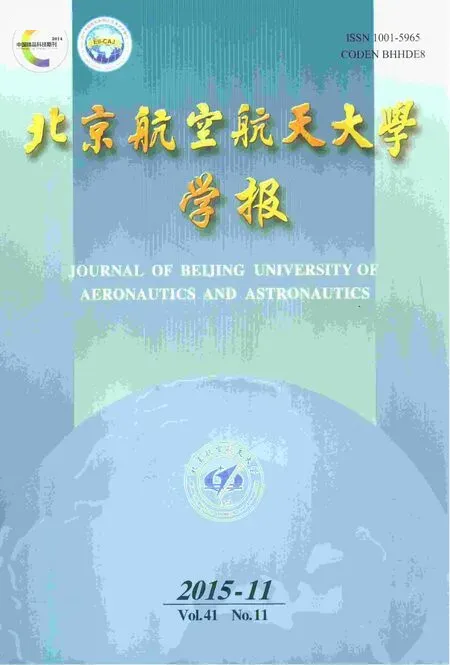
空氣懸架系統根據氣路系統中充放氣回路形式不同,可分為氣路開環和氣路閉環兩種空氣懸架系統類型[7-8].氣路開環空氣懸架系統是將空氣彈簧排出的壓縮氣體直接排放到大氣中,而氣路閉環空氣懸架系統是將空氣彈簧排出的高壓氣體用儲氣罐收集起來,循環使用.高低壓罐氣路閉環空氣懸架系統結構,通過增加蓄能低壓罐的方式實現車身高度調節氣路系統的閉環控制.氣路閉環橫向互聯空氣懸架系統工作原理簡圖如圖1所示.電子控制單元(Electronic Control Unit,ECU)控制不同電磁閥的開閉實現對空氣彈簧的充放氣,從而完成對車身高度的調節.充氣時高壓罐內的高壓氣體依靠高壓罐與空氣彈簧之間的氣壓差通過電磁閥a3和a4流向空氣彈簧中,車身克服自身重力和減振器阻尼力而升高;放氣時空氣彈簧內氣體依靠空氣彈簧與低壓罐之間的氣壓差通過電磁閥a1和a2排放到低壓罐中,空氣彈簧內氣壓減小,車身在自身重力作用下克服空氣彈簧力與減振器阻尼力而降低[9];升壓時啟動空壓機,把低壓罐內氣體壓縮后泵入高壓罐中循環使用.由于空氣彈簧排出的壓縮氣體排放到低壓罐中,系統在減少能耗的同時降低了系統工作時產生的噪聲污染.
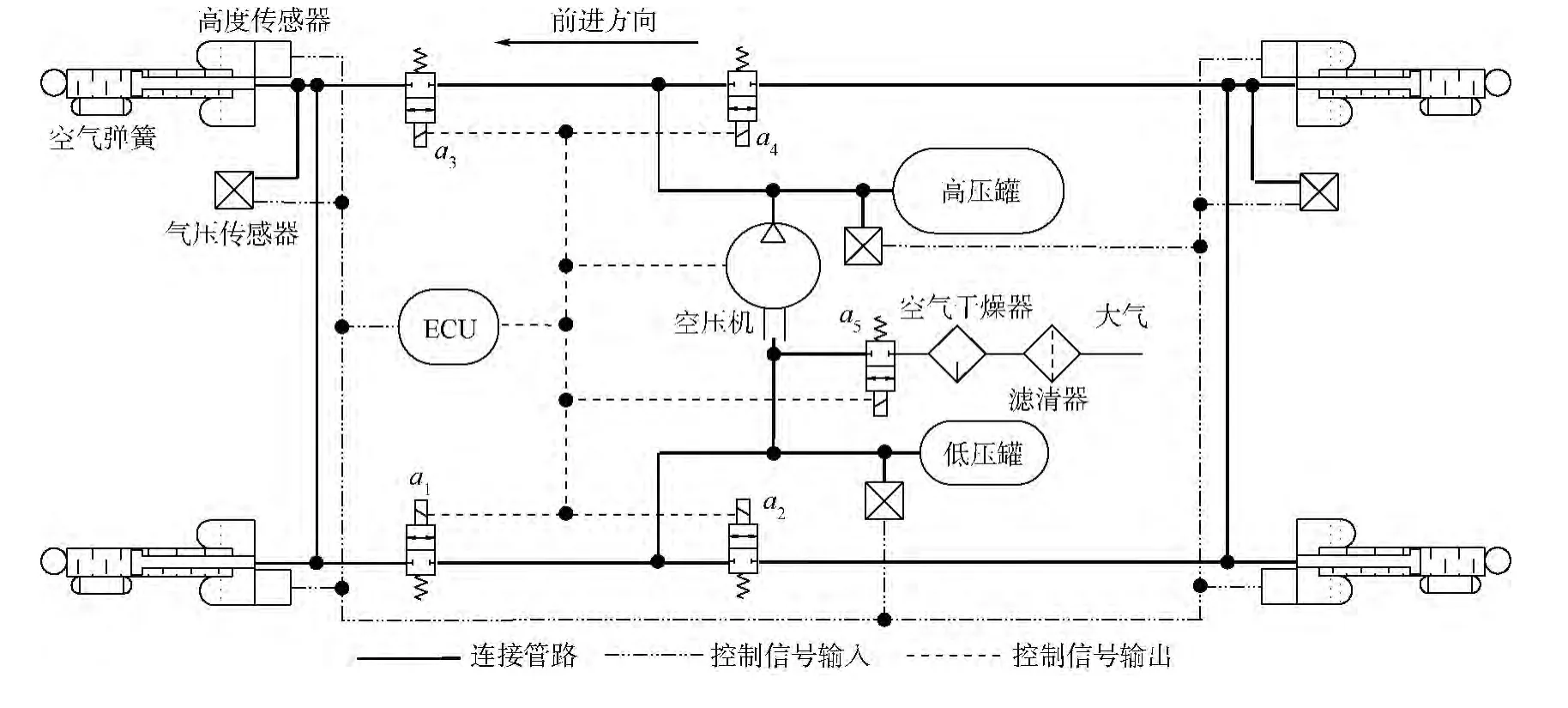
圖1 氣路閉環橫向互聯空氣懸架系統工作原理簡圖Fig.1 Schematic diagram of closed-loop air circuit laterally interconnected air suspension system
1.2 PID-PWM控制策略
在車身高度調節過程中,高度跟蹤系統的非線性及遲滯性是產生“過充”和“過放”現象的主要原因.電控空氣懸架系統最主要的特點是車身高度可根據目標高度做出快速調節,結合氣動理論與控制算法實現對車身高度的有效控制[10].通過控制PWM的占空比可控制質量流量的大小[11],其中,占空比為電磁閥打開時間與控制周期之比.PID控制器運用于車輛懸架系統的半主動控制,具有原理簡單、穩定性好、易于實現、參數的選定比較簡單等優點,在工程應用中受到廣泛的歡迎[12].PID控制策略多用于傳統非互聯空氣懸架系統車身高度調節[13-14],將傳統PID控制與PWM控制相結合,形成專門適用于互聯懸架車身高度調節的PID-PWM控制策略.ECU通過傳感器對實際車身高度跟蹤監測,判斷是否充放氣,根據高度傳感器采集到的4個空氣彈簧高度值得到車身俯仰角大小:

式中:θ為車身俯仰角;Z1為前左空氣彈簧高度;Z2為前右空氣彈簧高度;Z3為后左空氣彈簧高度;Z4為后右空氣彈簧高度;a為前軸到車身質心處的距離;b為后軸到車身質心處的距離.
根據車身俯仰角大小,分配前后兩端空氣彈簧不同的車身姿態修正系數,可通過調節PID控制算法中前后兩端空氣彈簧不同比例系數的方法達到車身姿態修正系數分配的目的.PID控制中,比例系數的作用是減小實際高度與目標高度之間的偏差,其取值大小直接影響車身高度調節速度的快慢;積分環節用于消除系統的靜差,提高車身高度調節精度;微分環節根據偏差的變化趨勢預先給出適當的糾正,防止產生超調現象.PID控制器通過電磁閥間接實現對氣體質量流量輸出大小的控制,然而電磁閥只有打開和關閉兩種狀態,不能實現氣體質量流量的無級可調,為此需要通過控制PWM的方式調節充放氣的平均氣體質量流量大小.
電磁閥的頻繁切換會影響其使用壽命,故電磁閥通電時間不能太短.當車身高度非常接近目標高度時,不能無限制地減小占空比來使車身實際高度準確達到目標高度,需根據允許的高度偏差范圍、電磁閥最短通電時間來確定控制算法中的高度死區.其中,高度死區指輸入信號變化而輸出信號沒有相應變化的高度區間.當高度偏差位于此高度死區范圍內時,即可停止車身高度調節[6].
設定空氣彈簧有低位、中位和高位3個工作位置,駕駛員可根據不同的路面狀況及車速選擇不同行駛高度.當車輛在不良路面上行駛時,抬升車身高度,從而提高車輛的通過性;當車輛高速行駛時,降低車身高度從而降低質心位置,提高車輛行駛安全性,減小側翻風險.當目標高度選定后,ECU開始自動調節車身高度.圖2為車身高度控制流程圖.
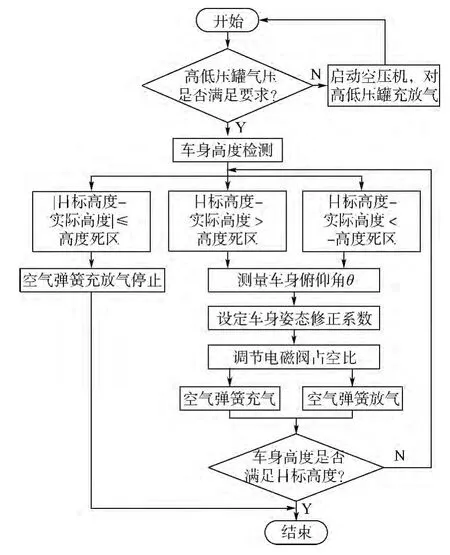
圖2 車身高度控制流程圖Fig.2 Flowchart of vehicle height control strategy
2 系統建模與仿真分析
2.1 整車模型建立
氣路閉環橫向互聯空氣懸架系統車身高度調節數學模型具有復雜的非線性特點,車身高度調節更多關注的是空氣彈簧、減振器和簧載質量構成的高度調節系統,而忽略簧下質量和路面等級等干擾信息[10].整車物理模型簡化如圖3所示.
圖3 空氣懸架系統整車模型Fig.3 Whole vehicle model of air suspension system
在分析橫向互聯空氣懸架系統的基礎上利用車輛系統動力學和牛頓運動學定律建立整車數學模型,得到整車數學模型運動方程:
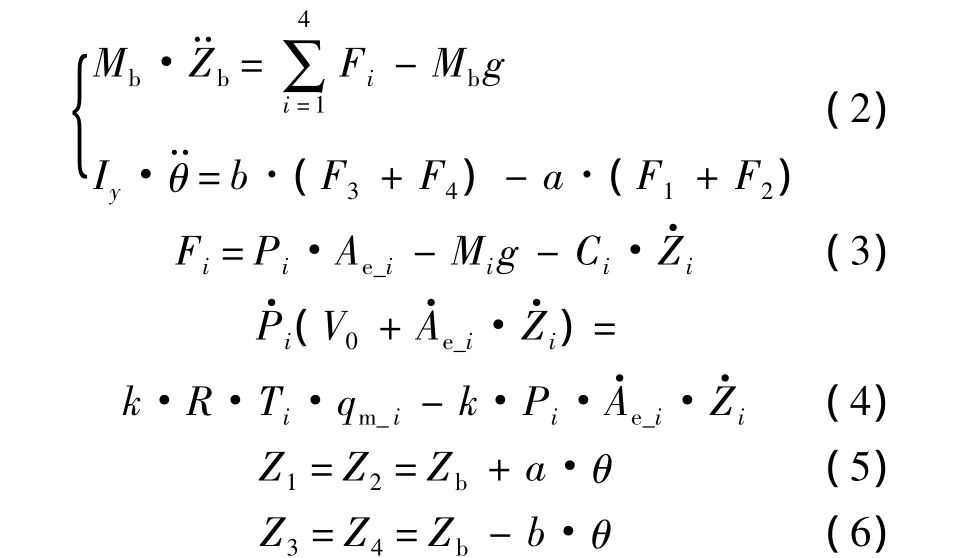
式中:Fi為 4 個懸架受到的作用力,i=1,2,3,4;Iy為關于y軸轉動慣量;Pi為4個空氣彈簧相對氣壓;V0為空氣彈簧初始容積;k為絕熱指數;R為常數;Ti為4個空氣彈簧內部氣體溫度;qm_i為4個空氣彈簧氣體質量流量;Ae_i為4個空氣彈簧的有效面積;Mi為4個空氣彈簧處的簧載質量;Ci為4個減振器阻尼系數;g為重力加速度.
在滿足工程應用的前提下,可以將管路與電磁閥等零件的節流作用等效為節流孔,節流孔主要對管路中流量起到限制與阻礙作用,根據節流孔上游壓力與下游壓力可得到一維均熵流動下流經小孔的質量流量[15]為

式中:qm為質量流量;A為節流孔有效流通面積;Pup為上游氣體絕對壓力;Pdn為下游氣體絕對壓力;Tup為上游氣體溫度;k為絕熱指數;β為臨界壓力比,β=0.528,當 Pdn/Pup≤β 時,管路流量屬于聲速流狀態,當β<Pdn/Pup≤1時,管路流量屬于亞聲速流狀態.
2.2 仿真分析
在MATLAB/Simulink中建立車身高度調節系統模型,通過仿真分析驗證控制策略的可行性.整車仿真參數參考某型轎車的尺寸參數,見表1.
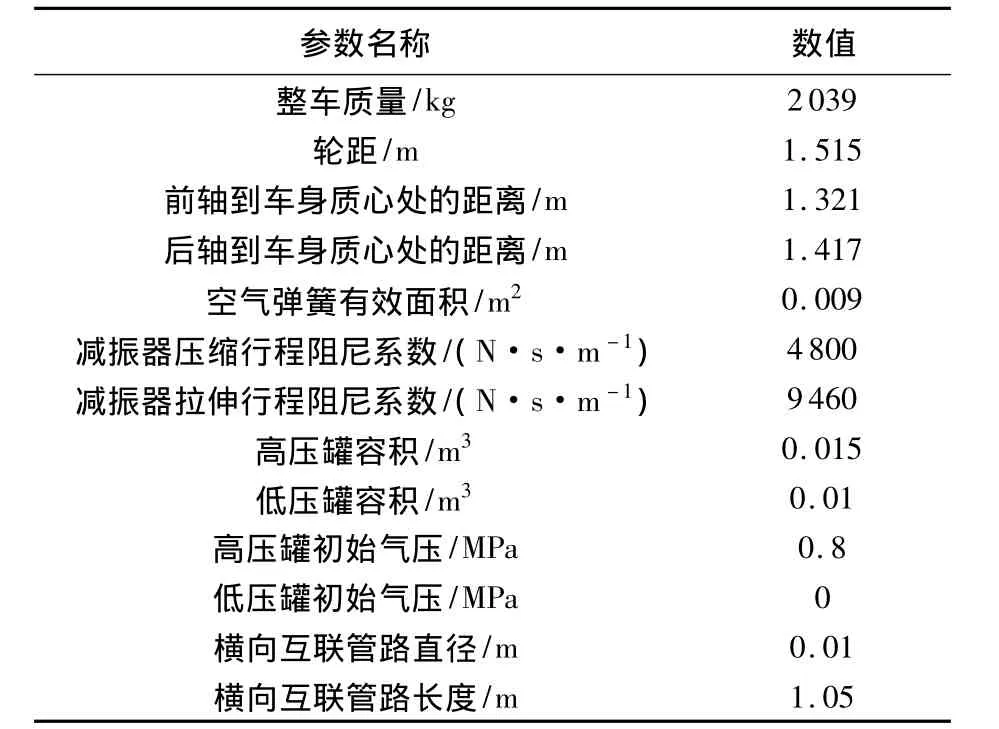
表1 整車參數Table 1 Whole vehicle parameters
氣路閉環橫向互聯空氣懸架系統中,前左與前右空氣彈簧相互連通,故前左與前右空氣彈簧在同一時刻高度變化可視為一致,將前左、前右空氣彈簧不同時刻的高度變化示數取平均值,統一為一條高度變化曲線:前空氣彈簧高度變化曲線.后左與后右空氣彈簧高度變化做類似處理.空氣彈簧位移與車身高度位移近似相等,通過控制空氣彈簧位移變化可得到車身高度不同工作位置的切換.
設低位模式坐標為-20mm,中位模式為0,高位模式為20mm.圖4為駐車工況下車身高度在低位與中位間的調節結果.由于中位與高位、低位與高位間的調節機理與低位至中位相同,故全文僅以低位與中位間的調節為例進行分析.從仿真結果可以看出,利用PID-PWM控制策略順利實現了車身高度的調節,該控制策略作動及時,響應迅速,調節后的實際高度準確達到了目標高度,且避免了超調現象.
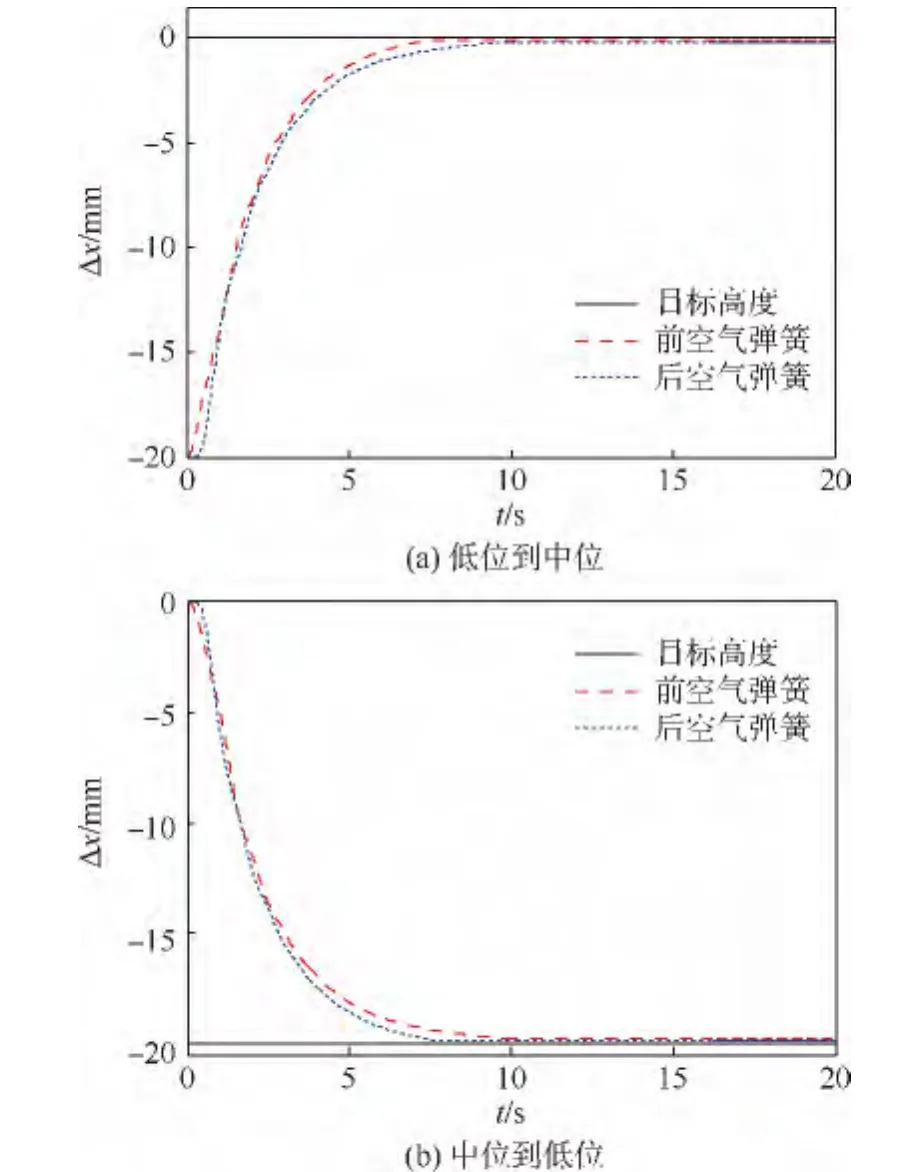
圖4 低位到中位和中位到低位車身高度調節仿真結果Fig.4 Simulation results of vehicle height adjustment from low mode to normal mode and from normal mode to low mode
3 試驗臺架及試驗結果與分析
3.1 試驗臺架簡介
試驗所用整車臺架根據某型轎車的尺寸參數搭建而成.整車臺架的長度、寬度、軸距等參數均按照參考車型設計,試驗參數與仿真參數一致.搭建的氣路閉環橫向互聯空氣懸架系統整車試驗臺架如圖5所示.
3.2 車身高度調節試驗結果與分析
這里主要分析駐車工況下車身高度在低位與中位間的調節結果.圖6和圖7分別為低位到中位車身高度隨時間的變化曲線與相應占空比信號隨時間變化曲線.調節過程中,ECU根據控制算法實時調節占空比大小.當車身高度與目標高度距離偏差較大時,ECU控制發出較大的占空比信號,加快充氣速度;當車身高度與目標高度距離偏差較小時,ECU控制發出較小的占空比信號,減緩充氣速度.
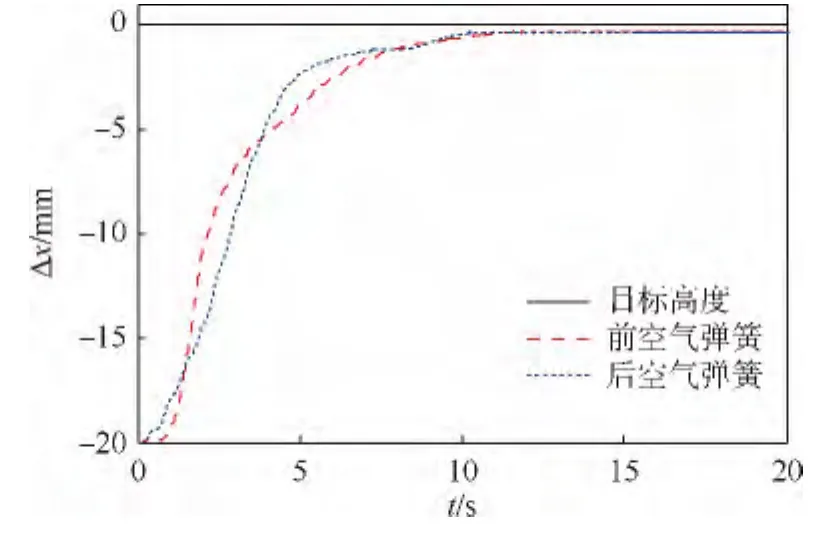
圖6 低位到中位車身高度調節試驗結果Fig.6 Test results of vehicle height adjustment from low mode to normal mode
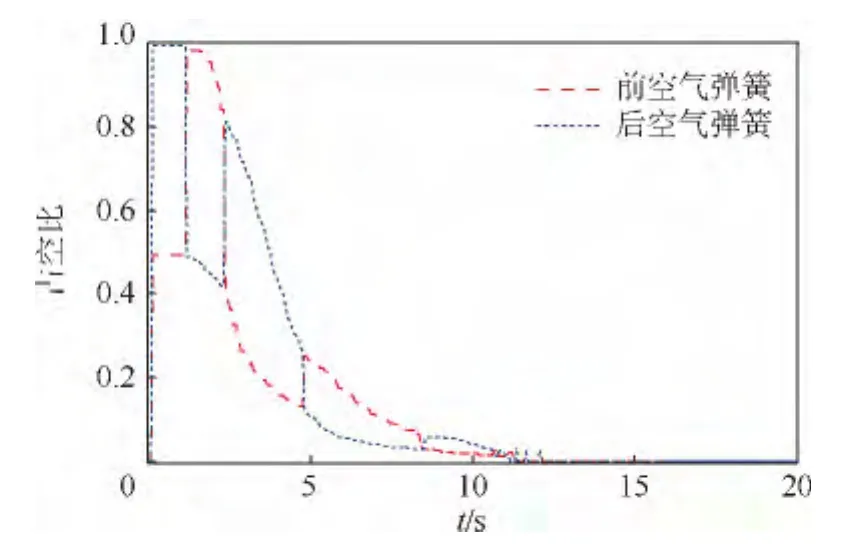
圖7 低位到中位車身高度調節占空比信號試驗結果Fig.7 Test results of the duty cycle signal during vehicle height adjustment from low mode to normal mode
為保持調節過程中車身姿態的穩定性,同一時刻分配給前后空氣彈簧充氣電磁閥不同大小的占空比.如圖7所示,以前空氣彈簧占空比信號為例,其占空比大小在車身高度調節過程中出現了幾次突變,且數值變化趨勢和后空氣彈簧剛好相反.前空氣彈簧和后空氣彈簧在不同時段的脈沖長度也不相同,從而更加精確地控制氣體質量流量大小,使實際車身高度更加接近目標高度.從調節結果可知,車身高度從低位準確迅速升至中位,且穩定后的高度與目標高度偏差很小.
車身高度從中位降至低位時,由于車身受力差異及電磁閥兩端壓差對進排氣質量流量的影響等因素的作用,其調節過程與車身高度從低位抬升至中位略有不同.從圖8可知,相比于車身高度從低位抬升至中位車身高度調節所耗時間長3 s左右.圖9與圖7比較可知,車身高度降低過程中會更加頻繁地調整占空比大小.
對比車身高度調節仿真結果(圖4)與試驗結果(圖6和圖8)可知,車身高度調節效果基本吻合,但相比于車身高度調節仿真過程,試驗調節的響應時間相對較長(3~5 s).這是由于建模仿真時沒有考慮氣體湍流效應等因素,導致所建模型不能完全真實地模擬車輛懸架系統.
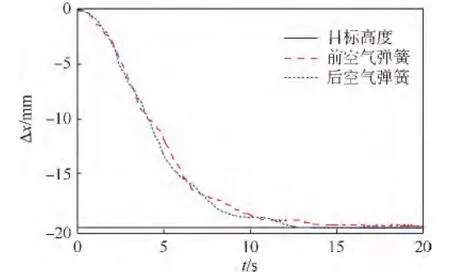
圖8 中位到低位車身高度調節試驗結果Fig.8 Test results of vehicle height adjustment from normal mode to low mode

圖9 中位到低位車身高度調節占空比信號試驗結果Fig.9 Test results of the duty cycle signal during vehicle height adjustment from normal mode to low mode
3.3 儲氣罐初始氣壓影響分析
儲氣罐初始氣壓的合理選擇對車身高度調節過程的順利實現至關重要.試驗中為能順利實現車身高度的切換,要求車身高度抬升至中位時高壓罐最低初始氣壓為0.75MPa,同時由于氣動管路承壓范圍的限制,高壓罐最高氣壓不能超過1MPa;車身高度降至低位時低壓罐最高初始氣壓為0.35MPa.為研究儲氣罐不同初始氣壓對車身高度調節的影響,試驗中高壓罐初始氣壓分為0.75、0.80、0.85、0.90 和0.95MPa 5 種情況,低壓罐初始氣壓分為 0、0.05、0.10、0.15、0.20、0.25、0.30 和0.35MPa 8 種情況.其中,調節時間指車身高度開始作動至車身高度達到高度死區范圍(高度偏差2%以內)所耗時間.調節誤差指高度調節穩定后的偏差與目標高度的百分比.
圖10(a)為車身高度在從低位抬升至中位時高壓罐不同初始氣壓對調節時間t與調節誤差δ的影響.從圖中可以看出,隨著高壓罐初始氣壓的增大,車身高度調節時間越來越快,調節誤差也有所改善.由此可見車身高度抬升過程中空氣彈簧與高壓罐間的氣壓差越大越有利于車身高度調節過程的實現.
圖10(b)為車身高度在從中位降至低位時低壓罐不同初始氣壓對調節時間與調節誤差的影響.從圖中可以看出,低壓罐不同初始氣壓對車身高度調節時間與調節誤差影響不顯著.當低壓罐初始氣壓超過0.30MPa時高度調節時間將會變長,這是由于車身高度降低過程中空氣彈簧氣壓與低壓罐氣壓差逐漸減小導致調節時間增加.
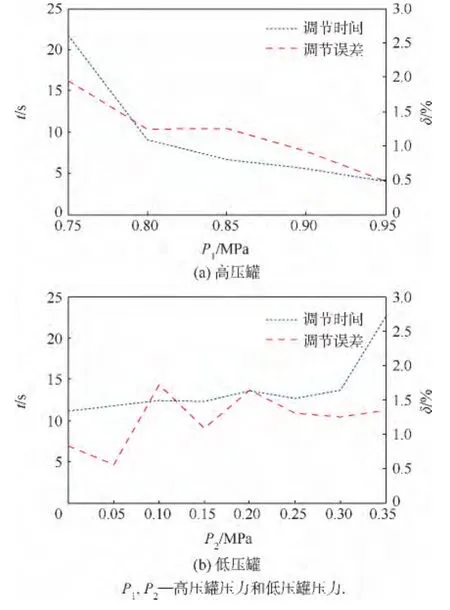
圖10 高壓罐和低壓罐不同初始氣壓對車身高度調節的影響Fig.10 Impact of different initial pressure of high low pressure chambers on vehicle height adjustment
基于儲氣罐初始氣壓影響分析可知,高壓罐初始氣壓在0.85~0.95MPa范圍,低壓罐初始氣壓在0~0.05MPa范圍時車身高度調節時間相對較短,調節誤差相對較小.但進一步研究可知,高壓罐初始氣壓越低,低壓罐初始氣壓越高越有利于能耗經濟性.實際應用中應根據車身高度調節性能與能耗性能要求合理選擇儲氣罐初始氣壓參數.
4 結論
1)結合互聯懸架與高低壓罐氣路閉環車身高度調節系統兩者優勢,設計了高低壓罐氣路閉環橫向互聯空氣懸架車身高度控制系統,并對傳統PID-PWM空氣懸架車身高度控制策略進行改進,形成了專用于互聯懸架系統的車身高度控制策略.建立了整車數學模型,搭建高低壓罐氣路閉環橫向互聯空氣懸架車身高度控制試驗平臺.
2)對控制策略的實際控制效果進行仿真與試驗驗證.仿真與試驗結果基本吻合,所設計的控制策略能快速準確地調節車身高度至目標高度,解決了采用傳統車身高度控制策略時存在的調節時間過長及超調現象等問題,驗證了所建模型的正確性以及控制策略的有效性.
3)對儲氣罐不同初始氣壓影響進行分析.試驗結果表明,隨著高壓罐初始氣壓的增大,車身高度調節時間顯著加快,調節誤差也有所減小.但低壓罐不同初始氣壓對車身高度調節時間與調節誤差影響不顯著.
References)
[1]郭孔輝,陳禹行,莊曄,等.油氣耦連懸架系統的建模與仿真研究[J].湖南大學學報:自然科學版,2011,38(3):29-33.Guo K H,Chen Y H,Zhuang Y,et al.Modeling and simulation study of hydro-pneumatic interconnected suspension system[J].Journal of Hunan University:Natural Sciences,2011,38(3):29-33(in Chinese).
[2] Cao D,Rakheja S,Su C Y.Dynamic analyses of heavy vehicle with pitch-interconnected suspensions[J].International Journal of Heavy Vehicle Systems,2008,15(2):272-308.
[3] Kat C J,Els PS.Interconnected air spring model[J].Mathematical and Computer Modelling of Dynamical Systems,2009,15(4):353-370.
[4]李仲興,崔振,徐興,等.互聯式空氣懸架動態特性試驗研究[J].科學技術與工程,2014,14(14):82-86.Li Z X,Cui Z,Xu X,et al.Experimental study on the dynamic performance of pneumatically interlinked air suspension[J].Science Technology and Engineering,2014,14(14):82-86(in Chinese).
[5] Roemer M,Scheerer H,Schweickhardt F.Air suspension having a closed compressed-air system:U.S.,Patent 6,698,778[P].2004-03-02.
[6]何二寶.電控閉環空氣懸架系統車高控制與節能研究[D].廣州:華南理工大學,2012.He E B.Research on vehicle height control and energy saving of electrically controlled closed loop air suspension system[D].Guangzhou:South China University of Technology,2012(in Chinese).
[7] Behmenburg C,Westerkamp H.Closed level control system for a vehicle:U.S.,Patent6,685,174[P].2004-02-03.
[8]陳玲,佘亮,車玲玲.基于AMESim的封閉式空氣懸架系統車高控制研究[J].機床與液壓,2013,41(11):86-88.Chen L,She L,Che L L.Research on vehicle height control of closed loop air suspension system based on AMESim[J].Machine Tool& Hydraulics,2013,41(11):86-88(in Chinese).
[9]竇輝,陳龍,汪少華,等.電控閉式空氣懸架車高調節控制研究[J].機械設計與制造,2014(9):171-174.Dou H,Chen L,Wang SH,et al.Research on vehicle height adjustment control of electronically controlled closed loop air suspension[J].Machinery Design & Manufacture,2014(9):171-174(in Chinese).
[10]徐興.ECAS客車車身高度非線性系統控制的研究[D].鎮江:江蘇大學,2010.Xu X.Study on control of ride height nonlinear system for bus with ECAS[D].Zhenjiang:Jiangsu University,2010(in Chinese).
[11]馮元元,杜群貴.半掛車電控空氣懸架車高調節模糊與PWM控制研究[J].科學技術與工程,2010,10(32):7974-7979.Feng Y Y,Du Q G.Investigation on body height adjustment for semi-trailer with electrically controlled air suspension and design of fuzzy/PWM controller[J].Science Technology and Engineering,2010,10(32):7974-7979(in Chinese).
[12]王偉達,丁能根,徐向陽,等.汽車DYC模糊PID控制方法[J].北京航空航天大學學報,2009,35(7):873-876.Wang W D,Ding NG,Xu X Y,et al.Fuzzy-PID control method of vehicular DYC[J].Journal of Beijing University of Aeronautics and Astronautics,2009,35(7):873-876(in Chinese).
[13]宋宇.空氣懸架車輛車身高度PID控制的仿真研究[J].湖北汽車工業學院學報,2007,21(2):1-4.Song Y.Study on ride height PID control technology of air suspension vehicle[J].Journal of Hubei Automotive Industries Institute,2007,21(2):1-4(in Chinese).
[14]曾潔如,谷正氣,李偉平,等.基于遺傳算法的半主動懸架模糊 PID 控制研究[J].汽車工程,2010,32(5):429-433.Zeng JR,Gu ZQ,LiW P,et al.A research on the fuzzy PID control for vehicle semi-active suspension based on genetic algorithm[J].Automotive Engineering,2010,32(5):429-433(in Chinese).
[15]SMC(中國)有限公司.現代實用氣動技術[M].2版.北京:機械工業出版社,2003:45-51.SMC(China)Ltd.Modern practical pneumatic technology[M].2nd ed.Beijing:China Machine Press,2003:45-51(in Chinese).
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32