圓柱凸輪的四軸聯動加工與仿真技術
2015-03-15 08:12:57劉偉淋
新技術新工藝 2015年1期
劉偉淋,程 璋
(中航工業南方航空工業(集團)有限公司,湖南 株洲 412002)
圓柱凸輪的四軸聯動加工與仿真技術
劉偉淋,程璋
(中航工業南方航空工業(集團)有限公司,湖南 株洲 412002)
摘要:圓柱凸輪是空間曲面結構,采用實體建模方式編程,建模過程復雜,編制時間長。研究了一種新的四軸聯動編程加工技術,該方法利用CAM軟件MasterCAM的纏繞功能,直接用二維曲線生成三維加工軌跡,程序后置處理后可直接送入機床進行加工具有簡單實用的特點。加工實踐表明,零件各項技術指標均達到設計要求,驗證了該編程方法的可行性。
關鍵詞:圓柱凸輪;四軸聯動;仿真技術
凸輪機構具有結構簡單、緊湊和從動件任意預期運動的特點,被廣泛應用于機床設備和零部件的裝配中,在各行各業中發揮著巨大的作用,在航空發動機中的應用較為廣泛。圓柱凸輪的構件數較少,結構簡單,制造難點主要在圓柱凸輪的輪廓曲線加工上,只要加工出高精度的凸輪曲線,就可以使從動件獲得各種預期的運動規律。圓柱凸輪與從動件之間的相對運動為空間運動, 所以零件的加工比平面凸輪復雜,傳統的普通設備已無法滿足設計精度要求。目前,圓柱凸輪主要是在多軸數控機床上通過聯動的方式加工成形,數控程序的編制是圓柱凸輪加工的關鍵。圓柱凸輪的編程方式主要有手動計算編程和通過軟件實體建模編程2種,由于手動編程不利于控制凸輪輪廓精度,已較少使用,在主流工程CAD/CAM軟件中, CATIA、Pro/E、UG和CIMCO都能實現圓柱凸輪的數控程序編制,編制過程分為實體建模、多軸加工路線和后置處理,但不管圓柱凸輪是實體建模還是多軸加工,除了需要一定的軟件建模基礎,還應掌握軟件的多軸加工策略,即使對該軟件非常熟悉的程編人員,也需要較長的時間來編制數控程序。CAM軟件MasterCAM在圓柱凸輪程序的編制上有較大的優勢,MasterCAM具有方便、直觀和運行速度快的特點,在二維繪圖、軌跡選擇和刀具路徑模擬方面也有其獨到之處[1-4]。
1圓柱凸輪數控程序編制
1.1建立圓柱凸輪輪廓曲線
圓柱凸輪輪廓展開圖如圖1所示,根據圓柱凸輪圓周角度與高度的對應關系,在MasterCAM中繪制出二維樣條曲線。樣條長度為凸輪周長,樣條曲線是從動件滾子中心線,所以凸輪輪廓線需向下偏移一個從動件滾子半徑。
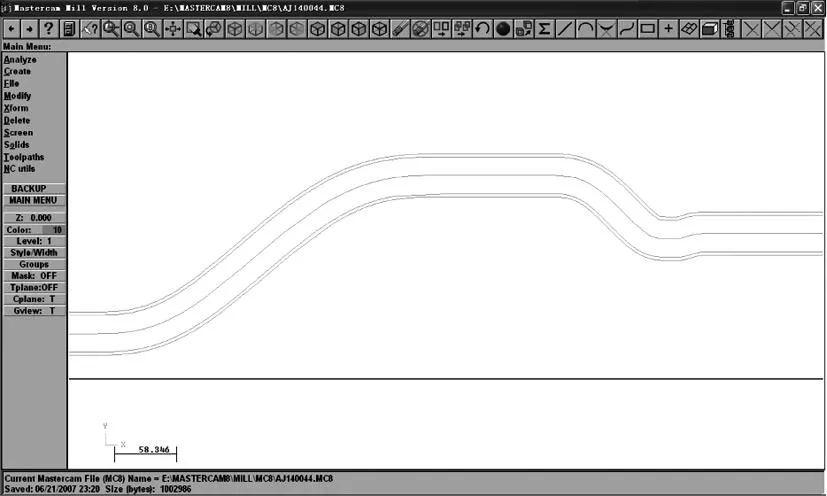
圖1 圓柱凸輪輪廓展開圖
1.2用二維樣條曲線生成三維圓柱凸輪軌跡
在刀具參數設置中打開滾動軸功能,該功能可以把1根二維的直線或曲線以坐標原點為圓心,按某一設定直徑值圍繞1圈,以圖1所示二維曲線為凸輪展開周長,圍繞圓心繞成1圈,形成閉合曲線,即為凸輪輪廓軌跡。開啟曲線纏繞功能如圖2所示。
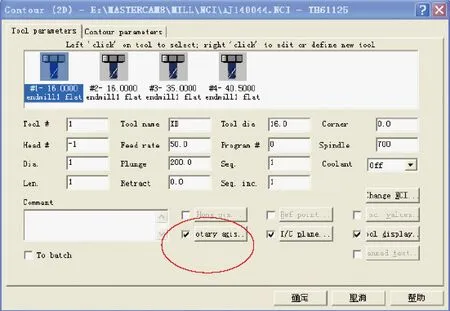
圖2 開啟曲線纏繞功能
在旋轉功能中根據數控機床的類型設置旋轉軸,臥式四軸加工中心圍繞Y軸旋轉,立式3+1數控加工中心圍繞X軸旋轉。以旋轉方向確定采用順銑還是逆銑的加工方式,順銑方式精加工能得到較好的輪廓表面粗糙度。根據凸輪周長計算出圓柱凸輪回轉直徑。旋轉參數設置如圖3所示。
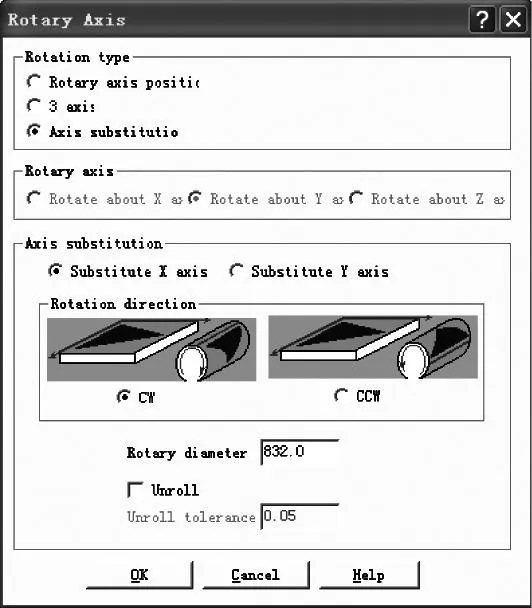
圖3 旋轉參數設置
1.3圓柱凸輪加工路徑的生成
在加工參數中設置加工深度、安全高度、刀具補償、進刀方向和加工精度后(見圖4),得到如圖5所示的圓柱凸輪實際加工軌跡。
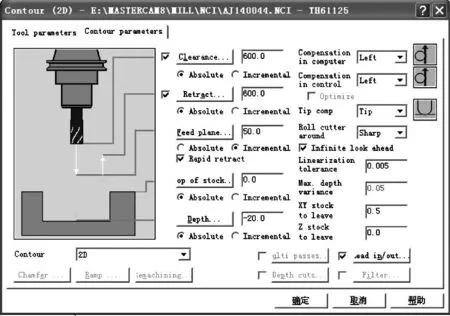
圖4 加工參數設置

圖5 圓粒凸輪實際加工軌跡
1.4后置處理生成數控程序
將三維數控軌跡經多軸數控機床后置處理文件后置處理(見圖6)后,可得到數控程序如下。
;(T01 XD D=16.)
N1T1
N2LTC
N3G00G90G54X0.Y178.580.S700M3
N4G00Z10.16.
N5G00Z466.
N6G01Z396.F200
N7G01G64G41D1Y128.5F50
N8G01B.1
N9G01B.201
N10G01Y128.499B.301
N11G01B.402
N12G01Y128.497B.503
N13G01Y128.495B.603
N14G01Y128.493B.705
N15G01Y128.489B.807
N16G01Y128.484B.908
N17G01Y128.479B1.01
N18G01Y128.472B1.112
N19G01Y128.463B1.214
N20G01Y128.453B1.317
N21G01Y128.442B1.419
N22G01Y128.428B1.523
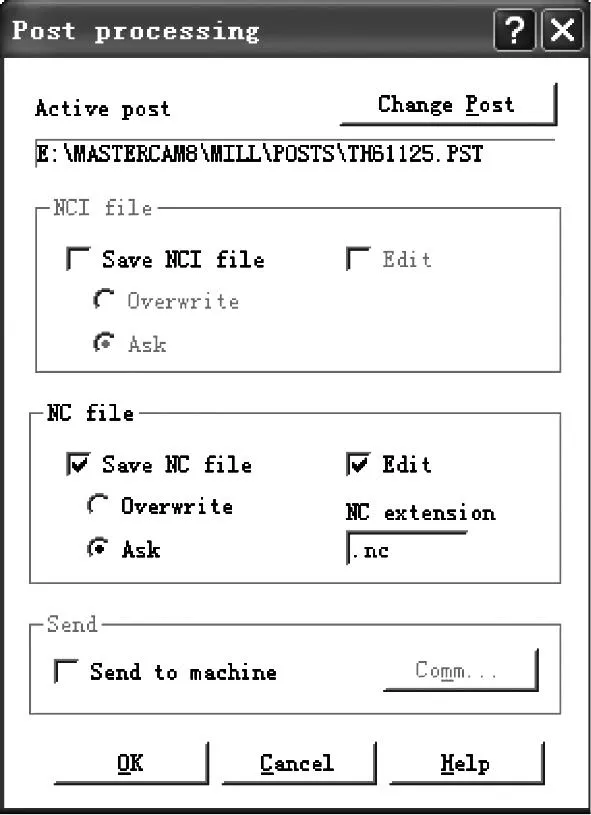
圖6 后置處理
2加工方法控制點
2.1加工方案的確定
圓柱凸輪加工是在凸輪外圓圓周面上沿著從動件的空間運動軌跡加工1條寬度為從動件滾子直徑的凸輪槽,其槽寬與從動件滾子直徑一致,由于凸輪運動屬于磨耗運動,從動件與凸輪之間是滾動摩擦,為了保證凸輪機構有較高的運動精度和使用壽命,應提高凸輪槽的加工精度和表面粗糙度。確定采用粗銑→半精銑→精銑的加工方案,如圖7所示。

圖7 粗、半精、精加工展開路線
2.2粗加工
對于槽寬為22 mm的圓柱凸輪,為避免粗加工過程中出現打刀現象而損壞輪廓面,兩側各留1 mm余量,選用φ20玉米銑刀,沿著凸輪槽中心線進行深度分層銑削,去除凸輪槽中間余量,因為粗加工以提高加工效率為主要目的,在刀具保持足夠剛度的情況下,采用了低轉速高進給的加工方式,轉速為500 r/min,進給量為150 mm/min,較高的每轉進給(0.3 mm/r)保證了加工效率,同時較低的線速度(30 m/min)提高了刀具壽命。
2.3半精加工
采用φ16 mm合金銑刀高速銑的方式半精銑銑削凸輪兩側,僅留0.3 mm精加工余量,減少了凸輪槽精加工過程刀具的磨損,使精加工過程中1把數控刀具能夠1次將凸輪槽加工完成,避免中途換刀造成的凸輪面接刀痕。
2.4精加工
為保證凸輪槽的型面精度和槽寬尺寸,采用范成法,選用與從動件滾子直徑相同的φ22 mm合金銑刀,刀具與滾子的幾何特征一致,保證了刀具與工件的嚙合關系同滾子與凸輪的嚙合關系是相同的,因此可以準確加工出圓柱凸輪的輪廓面。精加工余量為0.3 mm,可以采用高速銑的方法,轉速為2 000 r/min、進給量為300 mm/min,較高的轉速和進給量在提高加工效率的同時保證了圓柱凸輪面的表面粗糙度。
3數控程序的實體加工仿真
凸輪槽為多軸聯動加工,加工過程中刀軸矢量不斷發生,在CAM軟件中對其進行仿真,只能驗證其前置軌跡是否正確,無法對后置處理后的NC程序的實際加工效果進行檢測。經過軟件生成的NC程序較為復雜,為準確檢查數控程序的正確性,切削過程的可靠性,現采用VERICUT仿真軟件對其NC程序和機床的實際加工狀態進行仿真,這有利于準確發現數控程序中的過切問題及機床碰撞現象。
3.1凸輪槽加工仿真過程
在Vericut實體仿真軟件中建立與實際加工對應的數控設備、實體模型和刀具庫,設定加工零點,導入數控程序即可進行仿真。TH61125昆機虛擬機床對凸輪槽粗加工去除余量如圖8所示,圓柱凸輪槽精加工到如圖9所示的尺寸。
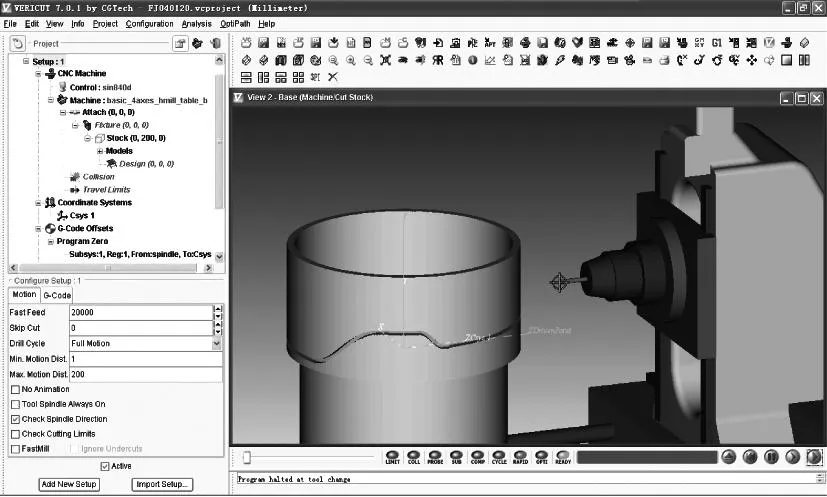
圖8 TH61125昆機虛擬機床對凸輪槽粗加工去除余量

圖9 凸輪槽精加工尺寸
3.2程序檢查
利用VERICUT軟件中的實體分析功能可對已模擬的圓柱凸輪槽寬和槽深進行測量,準確了解零件實際加工中的效果。選擇凸輪槽一側面,即可測出槽寬尺寸,如圖10所示。
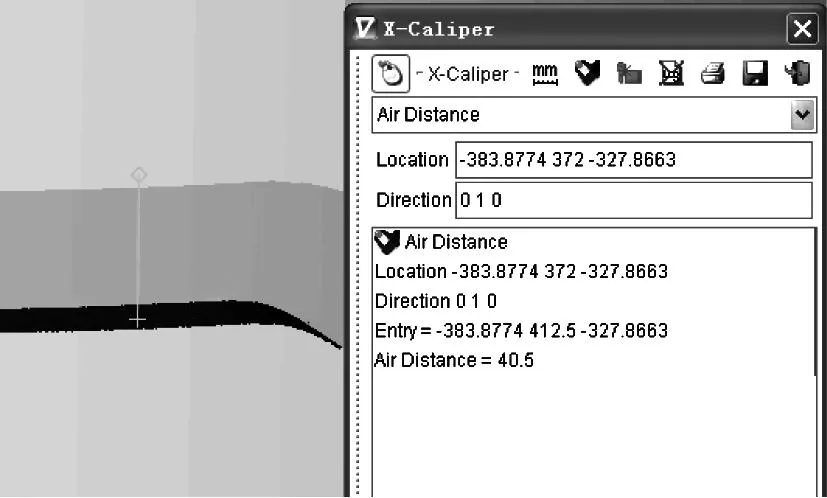
圖10 得到槽寬尺寸
3.3切削效果比較
對于已完成仿真的零件,可將其與設計模型進行對比,分析零件過切的部位及最大過切量和最大欠切量,及時調整數控程序。VERICUT對比功能如圖11所示,實際對比效果如圖12所示。
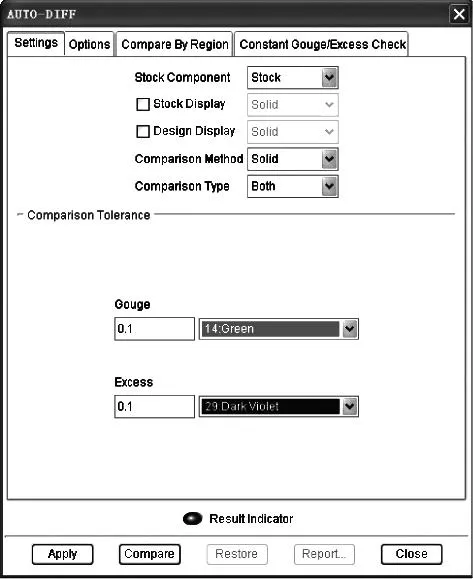
圖11 VERICUT對比功能
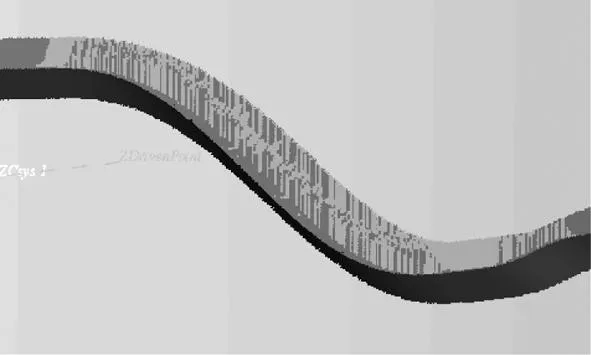
圖12 實際對比效果
4結語
本文介紹了圓柱凸輪的編程及加工方法,利用MasterCAM軟件的旋轉軸功能編制圓柱凸輪程序,該方法不需要建立實體模型,可直接通過曲線得到數控程序,具有方法簡單、快捷和精度高的特點,能將復雜的三維建模過程簡單化,在實際生產中表現出良好的效果。
參考文獻
[1] 吳長德.MasterCAM系統學習與實訓[M].北京:機械工業出版社,2003.
[2] 張磊.UG后處理技術[M]. 北京:清華大學出版社, 2007.
[3] 韓容第,周明.金屬切削原理與刀具[M].哈爾濱:哈爾濱工業大學出版社,1998.
[4] 陳宏鈞. 機械加工工藝手冊[M]. 北京:機械工業出版社,2004.
責任編輯李思文
Four-axis Linkage Machining and Simulating Technology for Cylindrical Cam
LIU Weilin,CHENG Zhang
(AVIC South Aviation Industry Co., Ltd, Zhuzhou 412002, China)
Abstract:Cylindrical cam is the dimensional curved surface structure, it would be a complicated and time-consuming process if adopting the entity modeling. There is a innovative programming approach based on four-axis linkage motion which makes it possible to generate 3D tool path directly by a two-dimensional curve through winding function in MasterCAM. It is very simple and practical for programmer after post-processing sent directly into the machine with no modification. Throughout practical machining, all the technical indicators of the part satisfy with the demand for designer, which means that the approach is feasible.
Key words:cylindrical cam, four-axis linkage, simulation technology
收稿日期:2014-03-11
作者簡介:劉偉淋(1974-),男,工程師,主要從事多軸數控編程與加工等方面的研究。
中圖分類號:TP 391
文獻標志碼:A