一種適于典型發(fā)動(dòng)機(jī)故障的自適應(yīng)制導(dǎo)方法
2015-03-13 02:56:45王繼平魏詩卉林紅斌王安民
固體火箭技術(shù) 2015年3期
王繼平,魏詩卉,林紅斌,王安民
(第二炮兵裝備研究院,北京 100094)
?
一種適于典型發(fā)動(dòng)機(jī)故障的自適應(yīng)制導(dǎo)方法
王繼平,魏詩卉,林紅斌,王安民
(第二炮兵裝備研究院,北京 100094)
為盡可能避免導(dǎo)彈固體發(fā)動(dòng)機(jī)故障引發(fā)全彈自毀造成飛行失敗,針對(duì)固體發(fā)動(dòng)機(jī)噴管和喉襯故障常出現(xiàn)在關(guān)機(jī)附近的情況,采用子級(jí)彈體自毀方案,提出一種適用此方案的自適應(yīng)制導(dǎo)方法,對(duì)導(dǎo)彈上面級(jí)發(fā)動(dòng)機(jī)能量進(jìn)行最優(yōu)管理,在能量充足時(shí)確保導(dǎo)彈仍能成功完成打擊任務(wù)。仿真結(jié)果表明,該自適應(yīng)制導(dǎo)能量管理有效,方法誤差小,證明了方法的正確性。
安全自毀;自適應(yīng)制導(dǎo);發(fā)動(dòng)機(jī)能量
0 引言
目前,彈道導(dǎo)彈的自毀控制主要采用姿態(tài)失穩(wěn)安全自毀方案,一旦導(dǎo)彈姿態(tài)失穩(wěn),允許自毀,就引爆整個(gè)導(dǎo)彈[1]。彈道導(dǎo)彈飛行成功率不能進(jìn)一步提高的原因主要是導(dǎo)彈常出現(xiàn)飛行故障,且一旦出現(xiàn)故障就進(jìn)行全彈自毀。為了更大程度地提高導(dǎo)彈飛行成功率,可從導(dǎo)彈出現(xiàn)的主要故障入手,對(duì)某些典型故障,不一定采用全彈自毀方案,只要能達(dá)到打擊目標(biāo)要求,可只將故障子級(jí)彈體自毀。
彈道導(dǎo)彈常出現(xiàn)的故障主要有動(dòng)力系統(tǒng)、控制系統(tǒng)、戰(zhàn)斗部等方面的問題。其中動(dòng)力系統(tǒng)主要是發(fā)動(dòng)機(jī)噴管和喉襯出現(xiàn)故障,且常在臨近關(guān)機(jī)時(shí)出現(xiàn)故障。在這種故障情況下,若只對(duì)故障子級(jí)彈體實(shí)施切割爆毀,提前分離,導(dǎo)彈損失的能量并不大。彈道導(dǎo)彈在攻擊非最大射程的目標(biāo)時(shí),一般采用高彈道來耗完能量,若采用最小能量彈道,實(shí)現(xiàn)最佳能量管理就可節(jié)省能量。因此對(duì)上面級(jí)彈體的飛行控制程序經(jīng)過重新規(guī)劃,實(shí)現(xiàn)最小能量彈道飛行,導(dǎo)彈就還有可能完成飛行任務(wù)。基于此思想,可在一定程度上提高導(dǎo)彈的飛行成功率。
本文基于上述背景,研究導(dǎo)彈發(fā)動(dòng)機(jī)發(fā)生故障、故障子級(jí)彈體實(shí)施切割爆毀后,導(dǎo)彈上面級(jí)飛行的制導(dǎo)控制方法,確保導(dǎo)彈上面級(jí)飛行滿足導(dǎo)彈的射程和精度要求。該方面的研究國內(nèi)外尚無文獻(xiàn)報(bào)道,但文獻(xiàn)[2]在發(fā)射飛行安全智能決策方面開展了相關(guān)研究,可為本文的安全控制思想作一鋪墊。彈道導(dǎo)彈動(dòng)力系統(tǒng)發(fā)生故障提前分離時(shí),導(dǎo)彈可能已經(jīng)偏離射面很大,采取提前轉(zhuǎn)級(jí)控制后,導(dǎo)彈上面級(jí)控制系統(tǒng)未必還有能力將導(dǎo)彈導(dǎo)引回標(biāo)準(zhǔn)射面飛行,這有可能導(dǎo)致上面級(jí)的姿態(tài)失穩(wěn),最可行的導(dǎo)引方案是將導(dǎo)彈直接導(dǎo)向目標(biāo)。另外,導(dǎo)彈故障子級(jí)彈體提前分離,導(dǎo)彈該子級(jí)飛行獲得的能量不足,關(guān)機(jī)速度達(dá)不到標(biāo)準(zhǔn)關(guān)機(jī)速度,若上面級(jí)按射前裝訂的飛行程序飛行,將無法達(dá)到要求的射程。為了達(dá)到攻擊目標(biāo)所要求的射程,需要重新計(jì)算上面級(jí)飛行程序,優(yōu)化發(fā)動(dòng)機(jī)能量分配。為此,提出了一種適于安全控制的自適應(yīng)制導(dǎo)方法,進(jìn)行上面級(jí)發(fā)動(dòng)機(jī)能量優(yōu)化管理,實(shí)現(xiàn)非射面內(nèi)的制導(dǎo)控制,提高導(dǎo)彈飛行成功率。
1 自適應(yīng)制導(dǎo)思想
適于安全控制的自適應(yīng)制導(dǎo)方法,以慣性彈道落點(diǎn)的等高偏差點(diǎn)[3]作為虛擬目標(biāo)點(diǎn)、以最佳再入彈道傾角作為約束量進(jìn)行需要速度求取,進(jìn)行上面級(jí)發(fā)動(dòng)機(jī)能量判斷與管理,自動(dòng)適應(yīng)下面級(jí)發(fā)動(dòng)機(jī)出現(xiàn)故障后的飛行,最后采用耗盡閉路制導(dǎo)[4-6],實(shí)現(xiàn)精確打擊。
基本思想:對(duì)于二級(jí)或三級(jí)固體發(fā)動(dòng)機(jī)導(dǎo)彈,若Ⅰ級(jí)發(fā)動(dòng)機(jī)或Ⅱ級(jí)發(fā)動(dòng)機(jī)或者兩者同時(shí)發(fā)生故障,則對(duì)故障級(jí)彈體進(jìn)行切割爆毀,此后導(dǎo)彈的上面級(jí)采用閉路制導(dǎo)方法進(jìn)行發(fā)動(dòng)機(jī)能量判斷與分配,以最小能量彈道的再入彈道傾角為約束量,實(shí)時(shí)迭代計(jì)算虛擬目標(biāo)點(diǎn),精確計(jì)算導(dǎo)彈由當(dāng)前狀態(tài)飛到再入點(diǎn)的需要速度,并預(yù)測(cè)關(guān)機(jī)點(diǎn)需要速度VKR,計(jì)算速度增量ΔV,若上面級(jí)發(fā)動(dòng)機(jī)提供的速度小于ΔV,則上面級(jí)能量不足,全彈實(shí)施自毀;若上面級(jí)發(fā)動(dòng)機(jī)提供的速度大于或等于ΔV,則導(dǎo)彈能量充足,上面級(jí)采用閉路+能量管理的制導(dǎo)方法即耗盡閉路制導(dǎo),對(duì)多余的能量進(jìn)行管理,并保證導(dǎo)彈能夠精確命中目標(biāo)。
可見,適于安全控制的自適應(yīng)制導(dǎo)方法關(guān)鍵是研究最小能量彈道再入傾角確定、虛擬目標(biāo)點(diǎn)的實(shí)時(shí)計(jì)算、基于閉路制導(dǎo)的能量判斷與管理方法。目前最佳彈道傾角的計(jì)算是針對(duì)最大射程的關(guān)機(jī)點(diǎn)彈道傾角[7],對(duì)任意射程的最小能量彈道再入傾角計(jì)算未見公開報(bào)道。虛擬目標(biāo)點(diǎn)一般在射前根據(jù)標(biāo)準(zhǔn)彈道確定,跟彈道高低、關(guān)機(jī)點(diǎn)參數(shù)有關(guān),為適應(yīng)發(fā)動(dòng)機(jī)故障,彈道高低發(fā)生變化,關(guān)機(jī)點(diǎn)參數(shù)也發(fā)生變化[8],精度不能保證,因而文中提出了虛擬目標(biāo)點(diǎn)的彈上實(shí)時(shí)計(jì)算方法以提高精度,其中需要速度計(jì)算是以當(dāng)前位置與慣性落點(diǎn)位置和再入點(diǎn)傾角為約束,傳統(tǒng)方法一般以飛行時(shí)間或關(guān)機(jī)點(diǎn)彈道傾角為約束[4,9],其迭代計(jì)算方法不適應(yīng),張志健給出了一種基于再入傾角約束的需要速度計(jì)算方法[10],此處可使用,文中也提出了另一種迭代計(jì)算方法,計(jì)算相對(duì)簡單一些。由于設(shè)計(jì)彈道時(shí)發(fā)動(dòng)機(jī)能量留有余量,只考慮對(duì)多余能量的管理[4-6,11],而未考慮發(fā)動(dòng)機(jī)能量是否充足判斷。為此,文中對(duì)能量管理方法進(jìn)行了改進(jìn)。
2 最小能量彈道再入傾角的確定
首先,根據(jù)射程按最小能量彈道估算關(guān)機(jī)點(diǎn)速度[7]:
式中kL為全射程與被動(dòng)段射程之比,稱為射程估算系數(shù),由標(biāo)準(zhǔn)彈道近似確定;L為導(dǎo)彈射程;R-為地球平均半徑,為6 371 004 m;rk為關(guān)機(jī)點(diǎn)地心距。
按標(biāo)準(zhǔn)彈道給定關(guān)機(jī)點(diǎn)地心距rk,可計(jì)算出最小能量彈道關(guān)機(jī)點(diǎn)能量參數(shù):
式中fM為引力常數(shù)。
關(guān)機(jī)點(diǎn)最佳彈道傾角[5]:
橢圓半通徑:
p=rkvkcos2Θk,opt
橢圓彈道偏心率:
橢圓長半軸:
再入點(diǎn)速度:
式中rc=R-+80 000 m。
最小能量彈道再入點(diǎn)能量參數(shù):
最小能量彈道再入點(diǎn)彈道傾角:
最小能量彈道再入點(diǎn)彈道傾角即為最佳再入傾角,下面以此傾角為約束量進(jìn)行閉路制導(dǎo)的虛擬目標(biāo)點(diǎn)和需要速度的彈上實(shí)時(shí)計(jì)算。
3 虛擬目標(biāo)點(diǎn)的實(shí)時(shí)計(jì)算方法
發(fā)動(dòng)機(jī)產(chǎn)生故障后,動(dòng)力不足,導(dǎo)彈可能大幅偏離射面,射前若按標(biāo)準(zhǔn)彈道計(jì)算虛擬目標(biāo)點(diǎn),其精度不能保證,因而提出了彈上實(shí)時(shí)迭代計(jì)算虛擬目標(biāo)點(diǎn)的方法,來提高虛擬目標(biāo)點(diǎn)的計(jì)算精度,實(shí)時(shí)計(jì)算虛擬目標(biāo)點(diǎn)需要采用自由飛行彈道的快速解算方法計(jì)算地球扁率對(duì)落點(diǎn)的影響,以減輕彈上計(jì)算負(fù)擔(dān)。同時(shí)為節(jié)省能量的需要,采用最小能量彈道傾角進(jìn)行需要速度和虛擬目標(biāo)點(diǎn)的迭代計(jì)算。此處,虛擬目標(biāo)點(diǎn)是指對(duì)應(yīng)于慣性彈道落點(diǎn)的虛擬目標(biāo)點(diǎn),若導(dǎo)彈再入段為慣性彈道,需要考慮再入阻力對(duì)虛擬目標(biāo)點(diǎn)的影響[4],為了研究的方便,再入段計(jì)算時(shí),忽略再入阻力;若導(dǎo)彈為再入機(jī)動(dòng)彈道,可通過再入機(jī)動(dòng)距離折算到慣性落點(diǎn)。
3.1 需要速度計(jì)算模型
為實(shí)現(xiàn)導(dǎo)彈當(dāng)前位置與慣性落點(diǎn)位置以及再入點(diǎn)傾角Θre為約束的需要速度計(jì)算,設(shè)計(jì)了以下迭代算法:
ξK,j=ξre,j-βj
ξM,j=ξre,j+βreM,j
[γM,j-γK,j+ej(sinγM,j-sinγK,j)]

根據(jù)以上各式進(jìn)行需要速度迭代,當(dāng)|pj+1-pj|<ε=1.0時(shí),結(jié)束迭代,取
ΘK,i=arctan(tanξK,j+1·(1-rk/pj+1))
式中 下標(biāo)i代表閉路制導(dǎo)計(jì)算到第幾步;ΘK,i為關(guān)機(jī)點(diǎn)彈道傾角。
可求得需要速度大小VRi:
從而可求出需要速度在發(fā)射慣性坐標(biāo)系下的分量[4]VRxa,i、VRya,i、VRza,i。
3.2 自由飛行彈道的快速計(jì)算方法
自由飛行彈道的快速計(jì)算方法常用的有自由段彈道解析解的非正交分解法、中間軌道法、基于狀態(tài)空間攝動(dòng)的自由段彈道解析法等,其中非正交分解法的落點(diǎn)偏差精度在百米左右,中間軌道法、基于狀態(tài)空間攝動(dòng)的自由段彈道解析法落點(diǎn)偏差計(jì)算精度都在40 m以內(nèi)[3]。可根據(jù)需要選擇相應(yīng)的自由段彈道快速計(jì)算方法,分別令地球扁率系數(shù)J=常值和J=0,計(jì)算落點(diǎn)偏差,即為地球扁率對(duì)落點(diǎn)的影響。
3.3 彈上迭代實(shí)時(shí)計(jì)算方法與步驟
導(dǎo)彈虛擬目標(biāo)點(diǎn)的彈上實(shí)時(shí)迭代計(jì)算,以虛擬目標(biāo)點(diǎn)經(jīng)緯度LM、BM為迭代參數(shù),采用自由飛行彈道的快速計(jì)算方法確定地球扁率影響,進(jìn)行需要速度迭代計(jì)算。
其彈上迭代實(shí)時(shí)計(jì)算方法與步驟如下:
(1)以真實(shí)目標(biāo)點(diǎn)為虛擬目標(biāo)點(diǎn)LM1、BM1計(jì)算需要速度VRxa,i、VRya,i、VRza,i;
(2)以需要速度和當(dāng)前位置、時(shí)間為當(dāng)前狀態(tài),采用自由飛行彈道的快速計(jì)算方法計(jì)算地球扁率引起的落點(diǎn)等高偏差ΔLM1、ΔBM1;
(3)對(duì)地球扁率引起的等高偏差進(jìn)行修正,獲得虛擬目標(biāo)點(diǎn):LM2=LM1-ΔLM1,BM2=BM1-ΔBM1;
(4)當(dāng)|LM j+1-LM j|<ε1,|BM j+1-BM j|<ε2(ε1,ε2為要求小量,j=1,2,…)時(shí),停止迭代。否則以虛擬目標(biāo)點(diǎn)LM2、BM2計(jì)算需要速度VRxa,i、VRya,i、VRza,i,轉(zhuǎn)入(2)。
4 基于閉路制導(dǎo)的能量判斷與管理方法
4.1 基于閉路制導(dǎo)的能量判斷方法
發(fā)動(dòng)機(jī)發(fā)生故障時(shí),需要判斷上面級(jí)提供的能量是否足以將導(dǎo)彈導(dǎo)向目標(biāo)點(diǎn)。下面對(duì)幾種故障情況的能量判斷方法進(jìn)行闡述。
(1)當(dāng)Ⅰ級(jí)發(fā)動(dòng)機(jī)發(fā)生故障時(shí),能量是否滿足要求的判斷方法

當(dāng)Ⅰ級(jí)切割分離后,進(jìn)行一次能量判斷,設(shè)導(dǎo)彈當(dāng)前位置速度為Vxa、Vya、Vza,引力加速度分量為gxa、gya、gza,到關(guān)機(jī)點(diǎn)的時(shí)間為T。按閉路制導(dǎo)方法進(jìn)行虛擬目標(biāo)點(diǎn)和需要速度的迭代計(jì)算,得導(dǎo)彈當(dāng)前位置需要速度VRxa、VRya、VRza,并預(yù)測(cè)關(guān)機(jī)點(diǎn)需要速度VKRxa、VKRya、VKRza,則導(dǎo)彈需要速度增量:
所需視速度增量大小為
當(dāng)導(dǎo)彈為二級(jí)固體發(fā)動(dòng)機(jī)導(dǎo)彈,上面級(jí)由Ⅱ級(jí)發(fā)動(dòng)機(jī)提供動(dòng)力。Ⅱ級(jí)發(fā)動(dòng)機(jī)能量能提供的速度為
VⅡ
式中Isp2為Ⅱ級(jí)發(fā)動(dòng)機(jī)真空比沖;M20為第2級(jí)導(dǎo)彈總質(zhì)量;M21為第2級(jí)導(dǎo)彈熄火質(zhì)量。
對(duì)于三級(jí)固體發(fā)動(dòng)機(jī)導(dǎo)彈,上面級(jí)由Ⅱ、Ⅲ級(jí)發(fā)動(dòng)機(jī)提供動(dòng)力。設(shè)導(dǎo)彈Ⅲ級(jí)發(fā)動(dòng)機(jī)提供的速度:
VⅢ
式中Isp3為Ⅲ級(jí)發(fā)動(dòng)機(jī)真空比沖;M30為第3級(jí)導(dǎo)彈總質(zhì)量;M31為第3級(jí)導(dǎo)彈熄火質(zhì)量。
導(dǎo)彈為兩級(jí)發(fā)動(dòng)機(jī)時(shí),如果VⅡ>ΔV1,則導(dǎo)彈能量足夠,否則能量不足,實(shí)施自毀;導(dǎo)彈為三級(jí)發(fā)動(dòng)機(jī)時(shí),如果VⅡ+VⅢ>ΔV1,則導(dǎo)彈能量足夠,否則能量不足,實(shí)施自毀。
由于Ⅰ級(jí)分離在大氣層內(nèi),虛擬目標(biāo)點(diǎn)的計(jì)算忽略了Ⅱ級(jí)飛行氣動(dòng)力影響,存在誤差,在導(dǎo)彈飛出大氣層后,虛擬目標(biāo)點(diǎn)計(jì)算相當(dāng)精確,此時(shí)對(duì)能量進(jìn)行一次精確判斷,設(shè)需要視速度增量為ΔV2,Ⅱ級(jí)發(fā)動(dòng)機(jī)剩余的能量:
V2m=VⅡ

導(dǎo)彈為兩級(jí)發(fā)動(dòng)機(jī)時(shí),如果V2m>ΔV2,則導(dǎo)彈能量足夠;否則能量不足,實(shí)施自毀;導(dǎo)彈為三級(jí)發(fā)動(dòng)機(jī)時(shí),如果V2m+VⅢ>ΔV2,則導(dǎo)彈能量足夠,否則能量不足,實(shí)施自毀。
(2)當(dāng)Ⅱ級(jí)發(fā)動(dòng)機(jī)發(fā)生故障時(shí),能量是否滿足要求的判斷方法
當(dāng)Ⅱ級(jí)切割分離后,后面級(jí)由Ⅲ級(jí)發(fā)動(dòng)機(jī)提供動(dòng)力。設(shè)需要視速度增量為ΔV3,求取方法同(1),如果VⅢ>ΔV3,則導(dǎo)彈能量足夠,否則能量不足,實(shí)施自毀;
(3)當(dāng)Ⅰ、Ⅱ級(jí)發(fā)動(dòng)機(jī)都發(fā)生故障時(shí),能量是否滿足要求的判斷方法
此種情況適于三級(jí)發(fā)動(dòng)機(jī)的導(dǎo)彈,當(dāng)I級(jí)切割分離后,按(1)的方法進(jìn)行一次能量判斷;當(dāng)Ⅱ級(jí)切割分離后,按(2)的方法進(jìn)行一次能量判斷。若2次判斷導(dǎo)彈能量都足夠,則導(dǎo)彈繼續(xù)飛行,攻擊目標(biāo),否則實(shí)施自毀。
4.2 基于閉路制導(dǎo)的能量管理方法
固體發(fā)動(dòng)機(jī)導(dǎo)彈一般采用耗盡關(guān)機(jī)方案,經(jīng)安全控制判斷,導(dǎo)彈能量足夠時(shí),需要對(duì)導(dǎo)彈發(fā)動(dòng)機(jī)能量進(jìn)行管理,在滿足關(guān)機(jī)條件的同時(shí),消耗多余的視速度模量。
導(dǎo)彈發(fā)動(dòng)機(jī)視速度模量ΔWD的定義如下[8]:
式中Isp i為第i級(jí)發(fā)動(dòng)機(jī)的比沖;mi0,mik分別為第i級(jí)子彈體的點(diǎn)火點(diǎn)質(zhì)量和停火點(diǎn)質(zhì)量;g0為標(biāo)準(zhǔn)引力加速度。
導(dǎo)彈耗盡關(guān)機(jī)能量管理分為閉路制導(dǎo)初段、姿態(tài)調(diào)制段、耗盡閉路導(dǎo)引段3段;可將發(fā)動(dòng)機(jī)視速度模量ΔWD分為3個(gè)部分:閉路制導(dǎo)初段為ΔWⅠ(占8%~10%),耗盡閉路導(dǎo)引段為ΔWⅢ(占10%~15%),其余部分為ΔWⅡ,留給能量管理姿態(tài)調(diào)制段。
當(dāng)導(dǎo)彈為兩級(jí)發(fā)動(dòng)機(jī)時(shí),在Ⅱ級(jí)發(fā)動(dòng)機(jī)工作時(shí)進(jìn)行能量管理。Ⅱ級(jí)發(fā)動(dòng)機(jī)開始工作時(shí)還處于大氣層內(nèi),為避免大氣的影響,導(dǎo)彈飛出大氣層后進(jìn)行能量管理。設(shè)導(dǎo)彈飛出大氣層時(shí),消耗的視速度模量為ΔWZ,經(jīng)歷的時(shí)間為tΔWz,導(dǎo)彈需要管理的總視速度模量為
閉路制導(dǎo)初段、姿態(tài)調(diào)制段、耗盡閉路導(dǎo)引段的能量管理與制導(dǎo)控制方法參見文獻(xiàn)[4,11]。
5 仿真算例
5.1 仿真條件
為了進(jìn)行仿真驗(yàn)證,設(shè)計(jì)了二級(jí)固體發(fā)動(dòng)機(jī)導(dǎo)彈,一級(jí)點(diǎn)火質(zhì)量32 030.5 kg,一級(jí)熄火質(zhì)量9 139.6 kg,地面比沖2 349.3 m/s,平均秒耗量308.4 kg/s,工作時(shí)間74.2 s;二級(jí)點(diǎn)火質(zhì)量6 575.7kg,二級(jí)熄火質(zhì)量1 771.9 kg,真空比沖3 397.3 m/s,平均秒耗量56.5 kg/s,工作時(shí)間85 s。最大射程7 000 km左右,最佳再入傾角為-30°。
現(xiàn)在用該導(dǎo)彈打擊射程3 781 517.6 m的目標(biāo)。發(fā)射點(diǎn)緯度為32°,發(fā)射點(diǎn)經(jīng)度為114°,射擊方位角50°,目標(biāo)點(diǎn)緯度46.746 894 6°,目標(biāo)點(diǎn)經(jīng)度154.397 579 9°。由于該射程非最大射程,為了耗完發(fā)動(dòng)機(jī)能量,采用高彈道,再入點(diǎn)彈道傾角-60°,關(guān)機(jī)點(diǎn)高程346 430.6 m,飛行時(shí)間為1 880.2 s。可求得該射程對(duì)應(yīng)的最小能量彈道最佳再入傾角為-37°。
設(shè)置Ⅰ級(jí)發(fā)動(dòng)機(jī)故障時(shí)間63 s,需要速度迭代計(jì)算βreM初值設(shè)為0 rad,tf初值設(shè)為800 s;虛擬目標(biāo)點(diǎn)地球扁率影響采用自由段彈道解析解的非正交分解法計(jì)算,以此條件進(jìn)行適于安全控制的自適應(yīng)制導(dǎo)仿真。
5.2 仿真結(jié)果
經(jīng)過仿真計(jì)算與分析,需要速度迭代計(jì)算4次以內(nèi)達(dá)到收斂要求,虛擬目標(biāo)點(diǎn)迭代計(jì)算3次內(nèi)達(dá)到收斂性要求,二級(jí)發(fā)動(dòng)機(jī)可提供速度4 455 m/s,故障時(shí)刻需要速度為4 184 m/s,可知導(dǎo)彈按最小能量彈道還可打到目標(biāo)點(diǎn)。若采用原始飛行程序和基于標(biāo)準(zhǔn)射面的制導(dǎo)方法,即使導(dǎo)彈不失穩(wěn),因一級(jí)發(fā)動(dòng)機(jī)提供能量不足,導(dǎo)彈將產(chǎn)生落點(diǎn)偏差為:縱向-1 242 655 m,橫向-71 033 m,不能完成打擊目標(biāo)的目的。采用自適應(yīng)制導(dǎo)方法對(duì)上面級(jí)進(jìn)行制導(dǎo)控制,仿真結(jié)果如圖1~圖5所示。
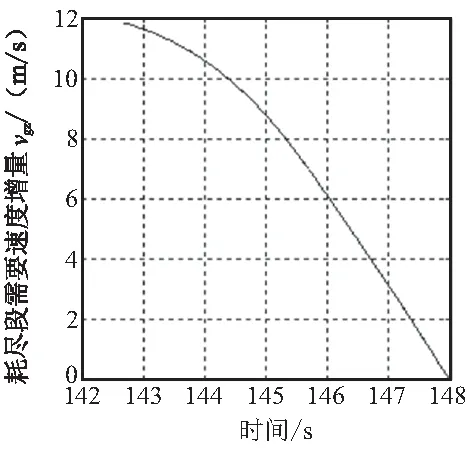
由圖1~圖5可見,從俯仰、偏航程序隨時(shí)間變化過程看,上面級(jí)能量管理有效地進(jìn)行了能量分配與運(yùn)用;從虛擬目標(biāo)點(diǎn)的變化曲線看,彈上虛擬目標(biāo)點(diǎn)計(jì)算與導(dǎo)彈的飛行狀態(tài)緊密相聯(lián),達(dá)到了準(zhǔn)確計(jì)算的目的,耗盡段虛擬目標(biāo)點(diǎn)時(shí)間變化曲線有些波動(dòng),是由于耗盡段能量耗盡預(yù)測(cè)控制引起;從需要速度增量變化趨勢(shì)看,“能量管理+閉路制導(dǎo)”的自適應(yīng)制導(dǎo)方法是有效的,當(dāng)需要速度增量趨近于0時(shí),達(dá)到關(guān)機(jī)條件進(jìn)行精確關(guān)機(jī)。
(a)俯仰角 (b)偏航角
(a)經(jīng)度 (b)緯度
(a)經(jīng)度 (b)緯度
適于安全控制的自適應(yīng)制導(dǎo)方法由于采用最小能量彈道,彈道傾角相比高彈道較小,從而飛行時(shí)間也短,約為1 165.09 s;由于該制導(dǎo)方法為顯式制導(dǎo)方法,方法誤差較小,方法誤差的計(jì)算考慮了起飛質(zhì)量偏差、發(fā)動(dòng)機(jī)推力偏差、秒耗量偏差、推力線偏斜、比推力偏差、風(fēng)干擾、壓力偏差和重心偏差共8種主要干擾的影響,干擾偏差取實(shí)際飛行最大可能值,確定該射程制導(dǎo)方法誤差為135 m(3σ)。綜上結(jié)果,證明了自適應(yīng)制導(dǎo)方法適于子級(jí)彈體自毀安全控制方案,并具有較高的制導(dǎo)精度。
(a)vgx (b)vgy
(c)vgz
(a)vgx (b)vgy
(c)vgz
6 結(jié)束語
為進(jìn)一步提高導(dǎo)彈的飛行成功率,提出了一種自適應(yīng)制導(dǎo)方法,該方法能夠適應(yīng)故障子級(jí)彈體自毀方案的安全控制,并按最小能量彈道進(jìn)行制導(dǎo),最大程度的節(jié)省能量,同時(shí)采用“能量管理+閉路制導(dǎo)”方法,有效管理剩余的能量,確保了導(dǎo)彈制導(dǎo)精度。由于采用了虛擬目標(biāo)點(diǎn)實(shí)時(shí)迭代計(jì)算方法,增加了計(jì)算量,對(duì)彈上計(jì)算機(jī)的計(jì)算能力提出了更高的要求,但隨著彈載計(jì)算機(jī)的發(fā)展,實(shí)時(shí)計(jì)算已不成問題。
[1] 龍樂豪.彈道導(dǎo)彈與航天叢書——總體設(shè)計(jì)(中)[M].北京:中國宇航出版社,2005:10.
[2] 李尚福,黃席樾,魏洪波.航天器發(fā)射飛行安全智能決策研究與實(shí)現(xiàn)[J].宇航學(xué)報(bào),2010,31(3):862-867.
[3] 鄭偉.地球物理攝動(dòng)因素對(duì)遠(yuǎn)程彈道導(dǎo)彈命中精度的影響分析及補(bǔ)償方法研究[D].長沙:國防科技大學(xué),2006.
[4] 陳世年.彈道導(dǎo)彈與航天叢書-控制系統(tǒng)設(shè)計(jì) [M].北京:中國宇航出版社,2005.
[5] 鄒毅,張洪波,湯國建,等.RLV 離軌制動(dòng)耗盡關(guān)機(jī)制導(dǎo)方法研究[J].固體火箭技術(shù),2013,36(5):575-579.
[6] 周軍,潘彥鵬,呼衛(wèi)軍.固體火箭的魯棒自適應(yīng)耗盡關(guān)機(jī)制導(dǎo)方法研究[J].航天控制,2013,31(3):34-39.
[7] 張毅,肖龍旭,王順宏.彈道導(dǎo)彈彈道學(xué)[M].長沙:國防科技大學(xué)出版社,2005.
[8] 王芳,劉新學(xué),王順宏,等.基于空間網(wǎng)格的制導(dǎo)方法研究[J].現(xiàn)代防御技術(shù),2013,41(2):84-90.
[9] 馬瑞萍,肖凡,張濤.一種基于速度傾角的閉路制導(dǎo)方法[J].航天控制,2012,30(1):6-9.
[10] 張志健,王小虎.約束最大高度和再入傾角的耗盡關(guān)機(jī)閉路制導(dǎo)[J].航天控制,2014,32(2):68-72.
[11] 李新國,王晨曦,王文虎.基于修正Newton 法的固體火箭能量管理彈道設(shè)計(jì)[J].固體火箭技術(shù),2013,36(1):1-6.
(編輯:呂耀輝)
An adaptive guidance method of the typical engine fault
WANG Ji-ping,WEI Shi-hui,LIN Hong-bin,WANG An-min
(The Second Artillery Equipment Institute,Beijing 100094,China)
Self-destruction of whole missile and flight failures resulted from by the fault of the solid engine of missile should be avoided to the largest extent.In the paper,for the nozzle and throat insert fault of the solid engine,a safety self-destruction project of the missile substage body and the adaptive guidance method for it were put forward,by optimization of energy management for the upper stage engine,which ensue that the missile can still accomplish the impact task when the engine energy of the upper stage engine is enough.The results show the energy management of the adaptive guidance method is valid and there is little error by simulation calculation.
safety self-destruction;adaptive guidance;engine energy
2014-06-09;
2014-10-09。
宇航智能控制技術(shù)國家級(jí)重點(diǎn)實(shí)驗(yàn)室開放基金。
王繼平(1977—),男,博士后,研究方向?yàn)閷?dǎo)航、制導(dǎo)與控制。E-mail:wjpzj111@hotmail.com
V448
A
1006-2793(2015)03-0308-06
10.7673/j.issn.1006-2793.2015.03.002
猜你喜歡
汽車維修與保養(yǎng)(2019年7期)2020-01-06 03:30:42
民用飛機(jī)設(shè)計(jì)與研究(2019年2期)2019-08-05 01:33:40
汽車維護(hù)與修理(2016年10期)2016-07-10 08:17:41
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
汽車維修與保養(yǎng)(2015年6期)2015-04-17 03:31:50
汽車維護(hù)與修理(2015年2期)2015-02-28 12:15:39
汽車與新動(dòng)力(2015年1期)2015-02-27 12:11:01
汽車與新動(dòng)力(2013年5期)2013-03-11 16:08:17