高動態下慣性加速度輔助三階鎖相環性能分析
2015-03-11 05:15:59李育龍左啟耀
導航定位與授時 2015年3期
關鍵詞:信息
李育龍,左啟耀,李 峰
(北京自動化控制設備研究所,北京 100074)
?
高動態下慣性加速度輔助三階鎖相環性能分析
李育龍,左啟耀,李 峰
(北京自動化控制設備研究所,北京 100074)
針對高階跟蹤環路穩定性比低階環路差,大帶寬帶來測量誤差大的問題。研究在高動態環境下,慣導加速度信息輔助衛星接收機三階載波鎖相環跟蹤算法,以及不同環路參數下跟蹤環路的性能。對載體高動態場景、加速度信息延遲進行建模,并對算法進行了數學仿真。仿真分析結果表明,在加速度信息輔助下,即使壓縮載波跟蹤環路等效噪聲帶寬到3Hz,在高達1200g/s的加速度動態下,環路跟蹤同樣穩定可靠。
高動態;加速度;鎖相環;慣性輔助
0 引言
衛星接收機常用鎖相環和鎖頻環實現對衛星信號的穩定跟蹤,由于鎖相環具有更高的跟蹤精度,因此衛星接收機一般先用鎖頻環牽引,減小跟蹤多普勒頻率誤差,之后轉為采用純鎖相環對信號進行跟蹤。
盡管鎖相環具有更高的跟蹤精度,然而鎖相環的動態性能不如鎖頻環,鎖相環為了穩定跟蹤高動態信號,需要采用較大的帶寬。但是增大帶寬勢必引入更多的熱噪聲,降低了環路的跟蹤性能;同時鎖相環在高動態環境下,容易發生相位失鎖或相位翻轉等現象。所以鎖相環和鎖頻環跟蹤高動態信號性能都存在不足。
利用慣性信息對載波跟蹤環進行輔助是一種提高接收機高動態環境適應性的有效手段[1]。依靠慣性導航系統(INS)的測量信息對于接收機跟蹤環路的輔助,跟蹤環路中大部分動態應力被消除。在采用鎖相環對信號進行跟蹤時,不用放大帶寬,即可實現對高動態信號的跟蹤,同時還不降低跟蹤性能。慣性信息輔助跟蹤環路屬于慣性/衛星深組合技術范疇,同樣有助于組合導航系統性能提高。
國內外很多文獻針對慣性信息輔助二階鎖相環路進行了研究。文獻[1]分析了慣性信息輔助二階鎖相環的環路跟蹤性能;文獻[2]研究了如何通過INS的加速度信息計算多普勒變化率,以輔助GPS載波環,提高GPS接收機的跟蹤性能;文獻[3]分析了GPS/INS不同層次的組合結構,給出了多普勒頻移和時鐘誤差頻率的外部估計方法,提出了一種基于跟蹤環的GPS/INS深組合方法,即通過外部或INS信息來調整載波頻率,從而減少甚至消除動態應力的影響,同時減小環路帶寬,提高抗干擾性能。
對于組合導航系統,慣性信息的處理、傳輸必定會產生延時,達不到實時輔助跟蹤環路的期望,導致環路中的動態應力不能完全抵消跟蹤環路需要跟蹤殘余的動態應力。通常三階鎖相環比二階鎖相環具有更好的動態跟蹤性能,所以慣性信息輔助跟蹤環路方案中,采用三階鎖相環更適合于殘余動態應力的跟蹤。本文研究了慣性加速度信息輔助三階載波鎖相環的數學模型,針對嚴酷的動態環境,及不同的加速度信息輔助時延,就輔助下環路的跟蹤穩定性進行仿真分析,并給出了環路關鍵參數的最優取值。
1 衛星接收機跟蹤環路
衛星接收機主要有碼環和載波環兩個跟蹤環路。其中碼環具有一定的魯棒性,不易失鎖,在采用載波輔助偽碼方法后,主要靠載波環對接收機高速運動引起的動態進行跟蹤,為了提高跟蹤精度,在跟蹤穩定后,采用純鎖相環進行跟蹤。

圖1 鎖相環的基本構成Fig.1 The basic structure of the phase locked loop
典型的鎖相環主要由鑒相器、環路濾波器和壓控振蕩器三部分組成[5],如圖1所示。輸入信號ui(t)與輸出信號uo(t)進行鑒相,得到鑒相誤差ud(t),鑒相誤差經環路濾波器濾波后得到濾波結果uf(t),根據濾波結果uf(t)調節壓控振蕩器,使得輸出信號uo(t)保持對輸入信號ui(t)穩定跟蹤。
圖2描述了整個鎖相環在拉氏變換域的函數傳遞關系。其中θi(s)與θo(s)分別作為系統的輸入與輸出,Kd為鑒相器增益,包含環路濾波器增益Kf在內的環路濾波器的傳遞函數為F(s),壓控振蕩器增益為Ko,鎖相環系統傳遞函數H(s)為
(1)
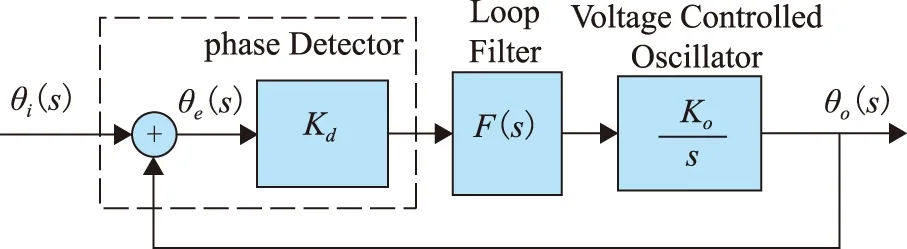
圖2 鎖相環s域模型Fig.2 The model of the phase locked loop
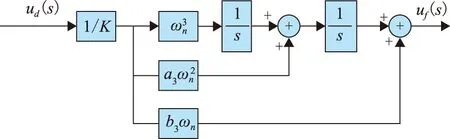
圖3 三階鎖相環濾波器Fig.3 The loop filter of the third order PLL
從鎖相環系統傳遞函數可以看出,環路濾波器F(s)基本上決定了鎖相環的性能,可見環路濾波器設計的重要性。鎖相環按階數來分主要有一階、二階和三階鎖相環,階數更高的鎖相環不太穩定,參數比較難以設計。三階鎖相環的環路濾波器結構如圖3所示,K為環路增益,ωn為特征頻率,a3、b3為濾波器系數,a3=1.1,b3=2.4,濾波器的傳遞函數為
(2)
將式(2)帶入式(1)可得三階鎖相環系統傳遞函數為
(3)
鎖相環帶寬BL=0.7845ωn,鎖相環為了跟蹤大的動態應力,通常需要較大的帶寬,越大的帶寬引入的噪聲越多,使相位測量精度變差,所以高動態跟蹤與高測量精度是矛盾的關系。通過慣性信息輔助,在跟蹤高動態信號時,大部分動態應力已被消除掉,環路不存在大動態跟蹤的問題,此時可以減小環路濾波器帶寬,提高測量精度,有效解決上述矛盾。
2 基于慣導加速度輔助跟蹤環路算法
有兩種慣性信息可用于輔助載波跟蹤環路,一種是多普勒頻率信息,另一種是加速度信息。加速度信息一般精度在10E-4量級左右,加速度信息經積分處理可以得到載體速度,根據載體速度和載體相對衛星的位置,可以計算出多普勒頻率信息。由于加速度信息精度很高,且比多普勒頻率信息的實時性要好,本文重點研究加速度信息輔助跟蹤環路算法。
利用慣性加速度信息輔助三階鎖相環的原理,直接用加速度信息輔助跟蹤環路,加速度信息通過無源低通濾波器后,直接與三階鎖相環的第一級積分器輸出相加,再經下一級積分器后,輸出信息直接控制壓控振蕩器輸出特定頻率載波信號。如圖4所示。
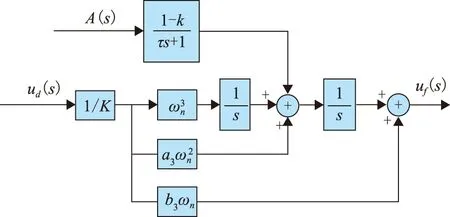
圖4 慣導加速度輔助鎖相環框圖Fig.4 The structure of the phase locked loop aided by inertial acceleration
慣導實際輸出的加速度信息具有一定的延時和更新率,典型更新率為500Hz、200Hz、100Hz,相對應產生的時延約為2ms、5ms、10ms。
為了推導慣性輔助后的系統傳遞函數特性,建模如圖 5所示。將系統輸入相位分為兩個部分,理想相位θi(s)和測量噪聲ei(s),理想相位經兩次微分后得到信號理想的加速度,由于慣導的加速度測量精度很高,所以慣導輔助量A(s)近似等于理想相位的兩次微分,如圖 5中虛線部分所示,并沒有真正連接,只是為了推導系統傳遞函數。模型可等效成兩個跟蹤環路,一個跟蹤環路跟蹤相位測量誤差ei(s),另一個跟蹤環路跟蹤輸入相位θi(s)。
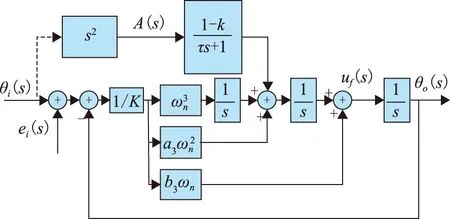
圖5 慣導加速度輔助鎖相環模型Fig.5 The model of the phase locked loop aided by inertial acceleration
跟蹤相位測量誤差的系統傳遞函數為
(4)
跟蹤輸入相位的系統傳遞函數為
(5)
在無慣性加速度信息輔助時,式(4)的系統傳遞函數就是整個系統的系統函數,當有慣性加速度信息輔助時,系統等效成兩個系統傳遞函數,接收機動態應力主要由跟蹤輸入相位的環路承受,系統傳遞函數為式(5),相位測量誤差部分主要由跟蹤相位測量誤差的環路承受,系統傳遞函數為式(4)。
分析系統傳遞函數Hθ(s)可知,當k、τ等于0時,即慣導測量無誤差且輔助無延遲時,Hθ(s)=1,帶寬無窮大,能夠承受任何動態;實際中,慣導輔助會有一定的時延和測量誤差,Hθ(s)等效為帶寬很大的低通濾波器,能夠跟蹤并消除大部分動態應力引起的載波相位變化量。
在慣性加速度信息輔助消除大部分動態應力的情況下,三階鎖相環可以采用更小的帶寬進行跟蹤,減小熱噪聲對系統的影響,提高相位測量精度,從而提高系統性能。
慣導輔助加速度信息的精度、時延和更新率決定著環路性能,由于慣導加速度精度很高,時延和更新率成為了關鍵參數。下面針對高動態場景,在不同時延和更新率條件下,仿真分析慣導加速度信息輔助的系統性能。
4 仿真分析
首先設定仿真的基本動態場景,加速度隨時間變化曲線如圖6所示,在13s時,有持續50ms時間的1200g/s的加加速度,30s時有持續5s的10g/s的加加速度,35s時有持續5s的-10g/s的加加速度,50s時有持續5s的-30g/s的加加速度,55s時有持續5s的30g/s的加加速度。
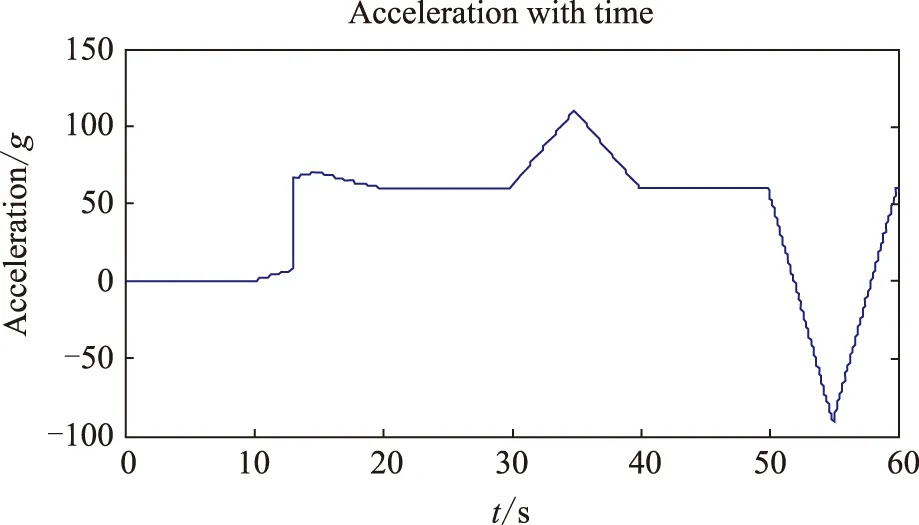
圖6 加速度隨時間變化曲線Fig.6 Acceleration versus time curve
在上述加速度的基礎上,首先仿真不加輔助的情況。設定信號載噪比為43dB·Hz,鎖相環帶寬為30Hz,仿真結果如圖 7、圖 8所示,鎖相環鎖定值在1200g/s加速度時發生一段時間失鎖現象,頻率誤差有較大跳動。
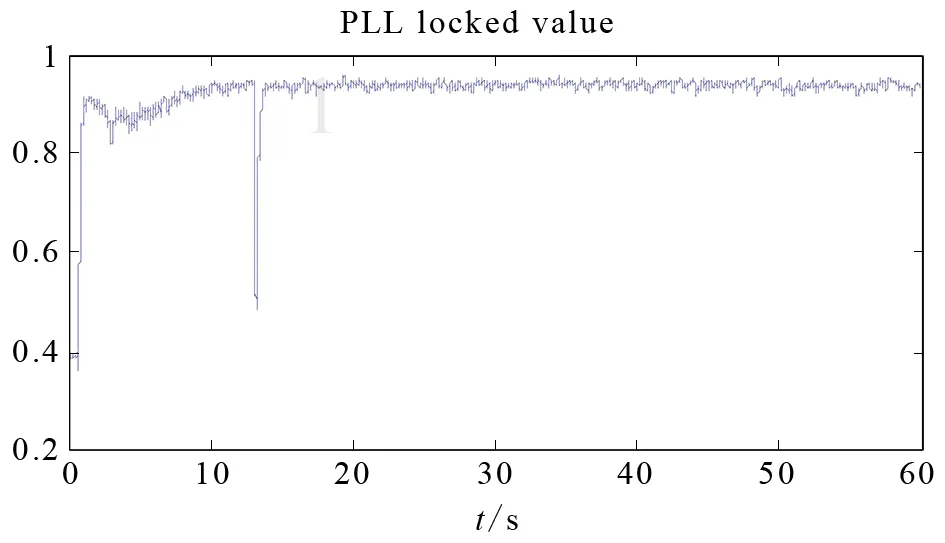
圖7 鎖相環鎖定值(30Hz,no aided)Fig.7 PLL locked value(30Hz,no aided)

圖 8 頻率誤差(30Hz,no aided)Fig.8 Frequency error(30Hz,no aided)
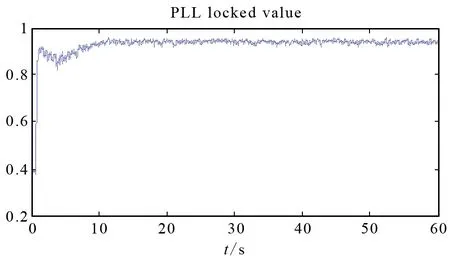
圖9 鎖相環鎖定值(30Hz,aided,5ms)Fig.9 PLL locked value(30Hz,aided,5ms)
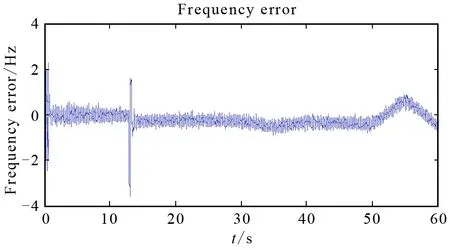
圖10 頻率誤差(30Hz,aided,5ms)Fig.10 Frequency error(30Hz,aided,5ms)
載噪比和鎖相環帶寬不變,增加慣性加速度信息輔助,輔助更新率200Hz,延時為5ms,結果如圖 9、圖 10所示。有輔助后,鎖相環鎖定值一直在0.8以上,鎖相環不再失鎖,頻率誤差最大抖動范圍為4Hz左右,明顯比不加輔助時的抖動范圍小,可見在帶寬相同的情況下,通過輔助,提高了環路的動態性能。
載噪比不變,輔助更新率200Hz,輔助延時為5ms,減小鎖相環帶寬為5Hz,結果如圖 11、圖 12所示,減小環路帶寬到5Hz時,鎖相環仍能夠正常跟蹤信號,在加加速度為0時,頻率誤差抖動范圍比帶寬為30Hz時要小,提高了測量精度。
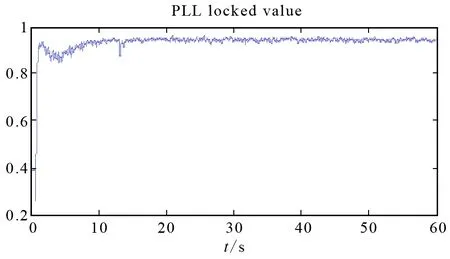
圖11 鎖相環鎖定值(5Hz,aided,5ms)Fig.11 PLL locked value(5Hz,aided,5ms)
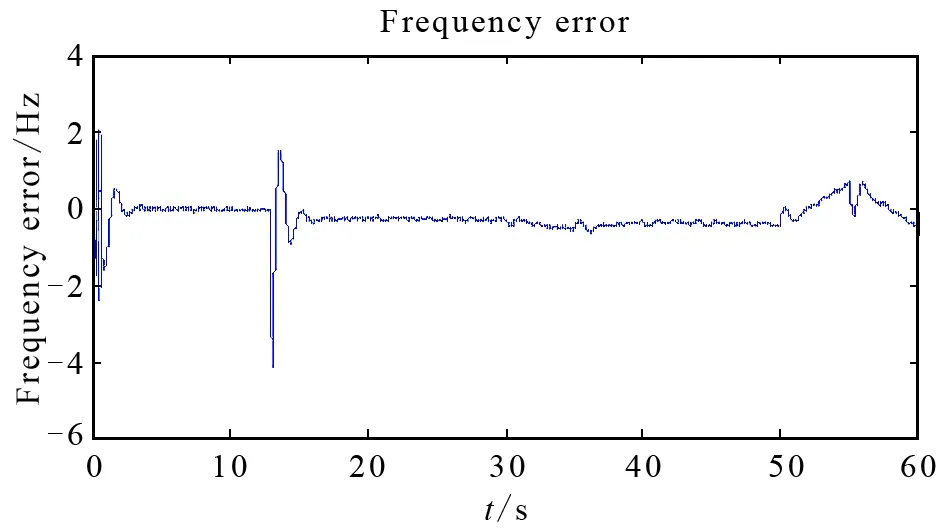
圖12 頻率誤差(5Hz,aided,5ms)Fig.12 Frequency error(5Hz,aided,5ms)
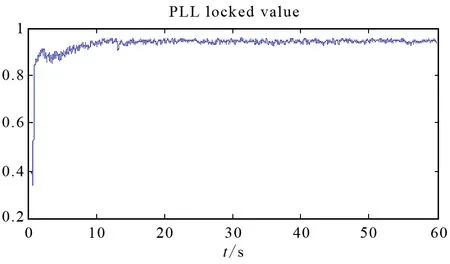
圖13 鎖相環鎖定值(3Hz,aided,2ms)Fig.13 PLL locked value(3Hz,aided,2ms)
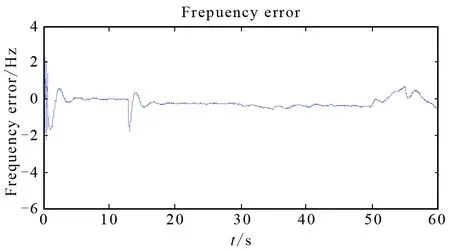
圖14 頻率誤差(3Hz,aided,2ms)Fig.14 Frequency error(3Hz,aided,2ms)
載噪比不變,輔助更新率500Hz,輔助延時為2ms,減小鎖相環帶寬為3Hz,結果如圖 13、圖 14所示,減小環路帶寬到3Hz時,鎖相環仍能夠正常跟蹤信號,在加加速度為0時,頻率誤差抖動范圍更小,測量精度進一步提高。
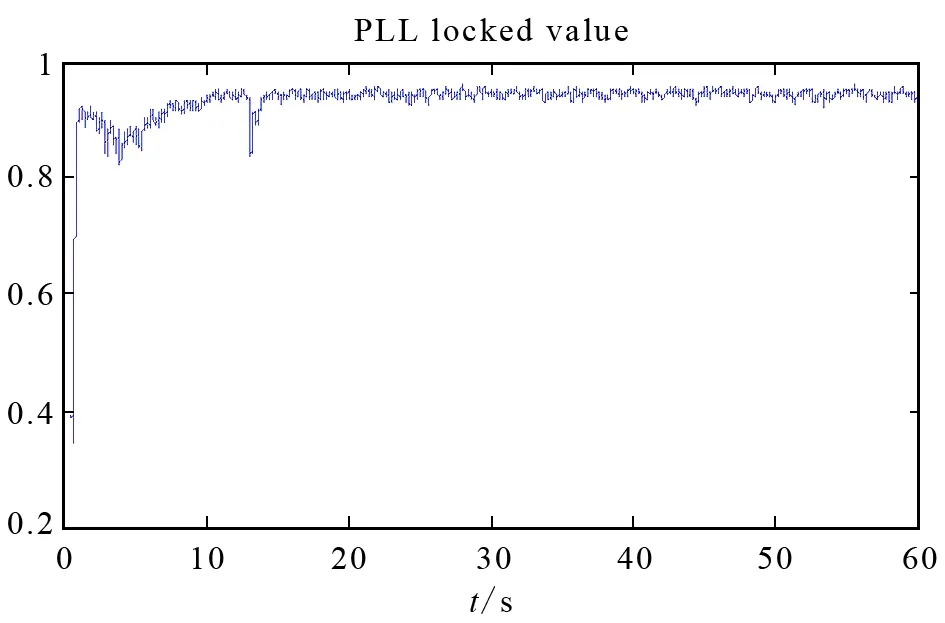
圖15 鎖相環鎖定值(7Hz,aided,10ms)Fig.15 PLL locked value(7Hz,aided,10ms)
載噪比不變,輔助更新率100Hz,延時為10ms,減小鎖相環帶寬到7Hz,結果如圖 15、圖 16所示,有輔助后,鎖相環不再失鎖,頻率誤差最大抖動范圍為10Hz以內,可見在輔助延時較大時,仍能有效提高環路性能。
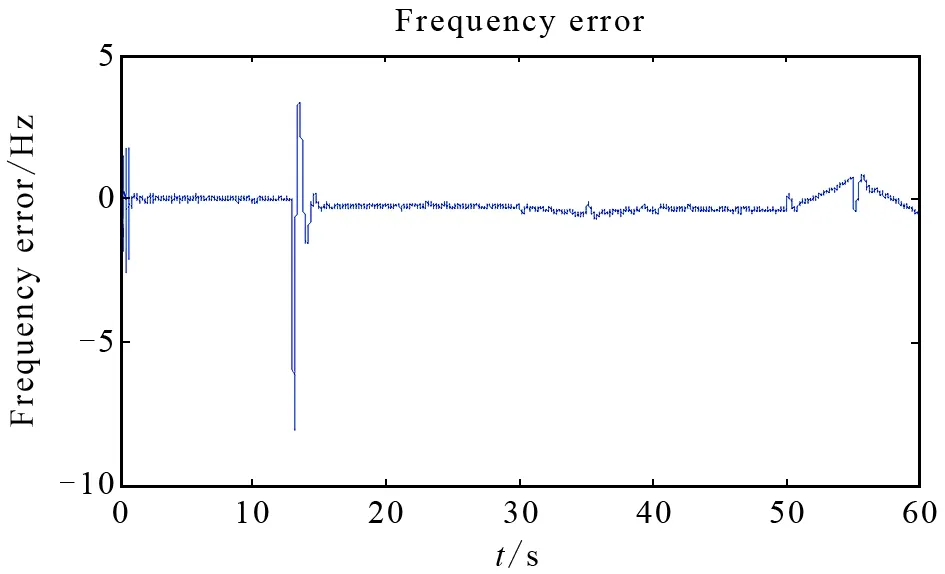
圖16 頻率誤差(7Hz,aided,10ms)Fig.16 Frequency error(7Hz,aided,10ms)
通過對比以上仿真結果可見,輔助更新率越高,輔助延時越小,輔助效果越好。
4 結論
本文提出了慣導加速度信息輔助三階鎖相環的模型,分析了其系統傳遞函數特性。針對持續時間為50ms,加加速度達到1200g/s的高動態應用場景進行了仿真,不輔助時,即使鎖相環采用30Hz的大帶寬,鎖相環也會有一段時間失鎖;采用輔助后,輔助更新率100Hz,輔助延遲為10ms時,鎖相環帶寬可以減小到7Hz,輔助更新率200Hz,輔助延遲為5ms時,鎖相環帶寬可以減小到5Hz,輔助更新率500Hz,輔助延遲為2ms時,鎖相環帶寬可以減小到3Hz,輔助信息具有高的更新率和較小的延時,鎖相環可以采用更小的帶寬,減小帶寬后,提高了相位測量精度。仿真分析結果表明,在加速度信息輔助下,即使壓縮載波跟蹤環路等效噪聲帶寬到3Hz,在高達1200g/s加加速度動態下,環路跟蹤同樣穩定可靠。采用慣性加速度信息輔助三階鎖相環的方法,能在跟蹤高動態信號的同時,具有更高的相位測量精度。
[1] 韓慧珍,陳紅林,王海勃.INS輔助GPS載波跟蹤環分析[J]. 電光與控制,2010,18(10): 59-63.
[2] 叢麗,鄭智毅,金天等.INS加速度信息輔助GPS載波跟蹤方法研究[J]. 計算機工程與設計,2012,33(11):4356-4361.
[3] 趙剡,易驍驍,張曉明.INS輔助的GPS接收機跟蹤環結構和性能分析[J]. 宇航計測技術,2007,27(6): 45-48.
[4]DemozGebre-Egziabher,AlirezaRazavi.DopplerAidedTrackingLoopsforSRGPSIntegrityMonitoring[A].In:ProceedingsofIONGPS/GNSS2003[C]//.FairfaxVA:USAInstituteofNavigation,Inc.,2003,2561-2571.
[5] 謝鋼.GPS原理與接收機設計[M]. 電子工業出版社,2009.7.
PerformanceAnalysisoftheThirdOrderPLLAidedbyInertialAccelerationunderHighDynamicConditions
LI Yu-long,ZUO Qi-yao,LI Feng
(Beijing Institute of Automatic Control Equipment,Beijing 100074,China)
This paper presents the arithmetic of 3rdorder carrier PLL assisted by acceleration information from INS(Inertial Navigation System),also introduces the performance of tracking loop with different parameter of loop. The model for high dynamic condition and accelerates information delay are built,based on the model,the arithmetic is simulated. The result indicates that,with accelerate information auxiliary,tracking loop is stable under 1200g/sconditionevencompressingthenoisebandwidthofcarriertrackingloopdownto3Hz.
High dynamic; Acceleration; Phase locked loop; Inertial assistance
2015 - 03 - 10;
2015 - 04 - 07。
李育龍(1988 - ),男,碩士,主要從事衛星導航技術方面的研究。
E-mail: 845983665@qq.com
TP
A
2095-8110(2015)03-0074-06
猜你喜歡
中華手工(2017年2期)2017-06-06 23:00:31
中外會展(2014年4期)2014-11-27 07:46:46
大眾創業(2009年10期)2009-10-08 04:52:00
數字社區&智能家居(2009年7期)2009-09-29 08:16:48
數字社區&智能家居(2009年11期)2009-06-25 04:30:34
數字社區&智能家居(2009年3期)2009-04-21 03:09:04
數字社區&智能家居(2009年2期)2009-03-27 04:33:44
數字社區&智能家居(2009年12期)2009-02-03 07:50:48
建筑創作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32
