無人機機載作動系統技術發展現狀
2015-03-11 05:33:25張新華
導航定位與授時 2015年3期
關鍵詞:系統
張新華
(北京自動化控制設備研究所,北京 100074)
?
無人機機載作動系統技術發展現狀
張新華
(北京自動化控制設備研究所,北京 100074)
首先介紹了高性能無人機機載作動系統組成,國內外應用現狀和技術發展趨勢,在此基礎上分析了多余度電傳飛行和作動系統所涉及的關鍵技術,最后給出研發該類系統的初步思路。
無人機;多余度作動系統控制單元;作動系統
0 引言
高性能無人飛行器是針對高空長航時大中型無人飛機而言,以高空無人偵察機和無人作戰飛機為主,可用于偵察監視、通信中繼、戰區預警、電子對抗、區域導航、空中打擊等方面,應用前景十分廣闊,它的發展和應用將進一步促進空天一體化技術的快速發展。國外具有代表性的高空長航時無人機有全球鷹、捕食者、X-45、X-47等,這些無人機的研究和應用不僅大大牽引了航空領域作動技術的快速發展,同時也為國內相關技術的研究發展提供了很好的借鑒,本文主要針對國外高性能無人機中的作動技術現狀進行分析,尋找差距,確定后續研究重點和需要解決的一些關鍵技術。
1 無人機機載作動系統范圍及功能
高性能無人機作動系統可以分為:主作動系統,主要用于控制和驅動飛行器的方向舵、升降舵及副翼;輔助作動系統,主要用于驅動和控制飛行器增升裝置中的襟翼、縫翼,以及水平安定面的配平操縱、擾流板等;起降裝置作動系統,主要用于起落架收放、轉向、鎖定和相應的艙門開啟等;發動機控制裝置,主要用于發動機燃油控制、節流控制、推力矢量控制等;載荷控制裝置,主要用于載荷艙體口蓋以及釋放裝置開啟等。表1給出了三類典型飛行器作動系統布局和使用情況。
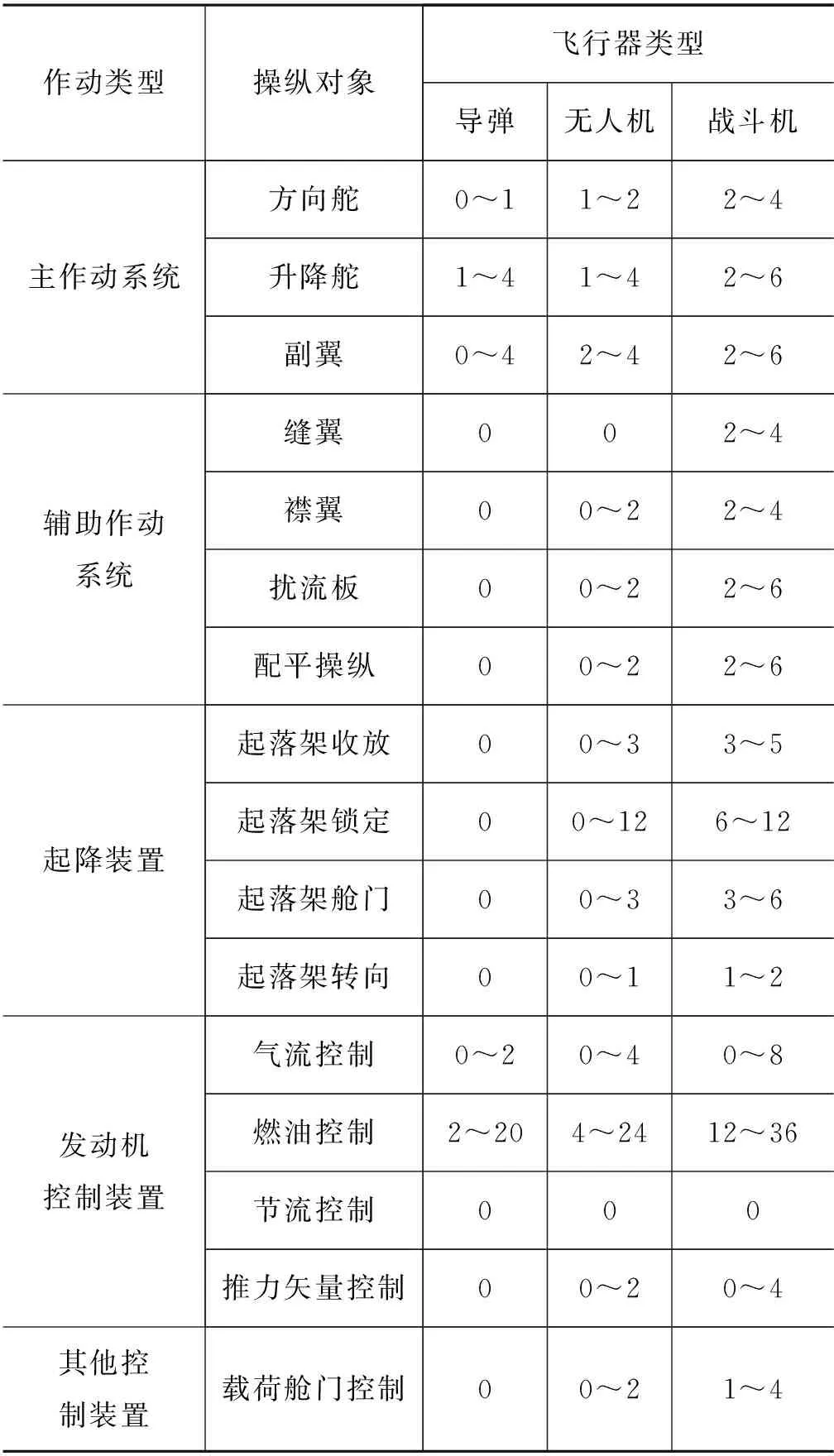
表1 各類飛行器對操縱及作動系統的需求[1]Tab.1 Demand of manipulation and actuation system of various types of aircraft
2 無人機機載作動系統應用現狀
2.1 RQ-4全球鷹無人機的作動系統[2]
RQ-4全球鷹無人機由諾·格公司于1994年10月開始總體集成研制,1998年2月首飛。該無人機可在18000~19000m高度,以0.64馬赫巡航飛行,續航時間超過32h。 如圖1所示,全球鷹采用“V”型50°上反角尾翼和大展弦比下單翼布局,每片尾翼上各有兩片組合的內外方向升降舵面,每個機翼有內側和外側外鉸接式的擾流板,最外側有兩片鉸接的混合副翼。這些操控面的操控裝置采用通用電氣航空機械系統公司研發的飛行控制作動系統。同時采用霍尼韋爾公司的BG1232雙余度綜合飛控系統,即:內外側操縱面作動系統控制單元,余度設計采用不分主次的熱備份方式。該系統具有耦合鏈接和冗余管理功能,可為系統提供兩套功能相同的單元。

圖1 全球鷹操控面布局Fig.1 Control surface layout of the Global Hawk
由于副翼、方向舵、升降舵和擾流板從結構上都被分為兩個相同的獨立部分,每個部分都被雙余度綜合作動系統控制單元中的一個單元控制,當一個單元發生故障時,相應的作動系統和操縱面會鎖定在某個位置,這時作動系統控制單元利用控制冗余,自主調節,保持對飛機的正常控制,使其繼續穩定飛行。耦合鏈接的飛行控制、雙余度控制以及操控面和伺服系統的雙余度設計為全球鷹提供了高可靠性。
全球鷹采用了可收放前三點式起落架。前起落架由赫羅克斯公司(Heroux Devtek)在F-5飛機起落架方案基礎上改進而成,剎車采用古德里奇公司的電動剎車系統,該電動剎車系統也被應用到夢幻787客機等飛行器中;全球鷹Block 20的主起落架采用了F-16的起落架方案和部件,收放仍采用液壓作動方式。
2.2 MQ-9捕食者無人機的作動系統[3]
MQ-9捕食者B(又稱收割者)型無人機由美國通用原子航空公司在MQ-1基礎上改進設計而來,最大飛行高度15.8km,滯空時間可達到36 h。捕食者B同樣為下單翼飛行器,機身細長,采用大展弦比機翼和“V+I”形尾翼(見圖2)。采用與“全球鷹”類似的冗余操控面布局,“V” 形翼中的每片尾翼上各有兩片組合的內外方向升降舵面,“I” 形尾翼上有一個方向舵;每個機翼有內外兩個鉸接的擾流板,最外側有兩片副翼。由于早期的MQ-1全球鷹沒有采用余度設計,因此,在多次參戰過程中損失了10多架,改進后的MQ-9捕食者B采用了三余度綜合作動系統控制單元,以及雙余度伺服系統和雙余度發動機控制系統。

圖2 捕食者無人機操控面布局及起落架裝置Fig.2 Control surface layout and landing gear of Predator UAV
捕食者系列無人飛機的起落架系統也采用前三點式布局。長柔性主起落架主要由單向玻璃纖維樹脂構成,無減震器,其著陸過程中通過復合材料的彈性變形和輪胎摩擦耗散能量,前起落架采用了油氣緩沖裝置。

圖3 X-45A無人機操控面布局Fig.3 Control surface layout of X-45A UAV
2.3 X-45A無人機的作動系統[4]
X-45A無人戰斗機是聯合無人空中作戰系統的一部分,1997年開始由波音公司集成研制,該系列無人機主要有X-45A、X-45B、X-45C。X-45A采用后掠翼隱身無尾翼結構布局設計,翼展10.4m,機長8.1m,滿載總質量6804kg左右。最大飛行高度可達26km,巡航速度0.8馬赫,于2002年進行首飛試驗。該無人機采用六個尾部邊條升降翼和一個航向推力矢量發動機進行飛行控制,每個機翼安定面后面分別布置內側、中部和外側操控翼面,外側和中部操控面位于一個可以拆卸的翼面上(見圖3)。在起飛、巡航和著陸過程中,通過對這些操縱面進行對稱、差動及組合控制,實現飛行姿態的調整。整個無人機采用了18個電動執行機構,分別用于操控面、起落架轉向及收放,所有電動執行機構由HR Textron公司研制。彈藥艙門由穆格公司研制的一個旋轉式電動執行機構進行控制。X-45A無人機也采用了雙余度作動系統控制單元(VMS),VMS包括了柯林斯公司研制的一個GEM III GPS裝置、霍尼韋爾公司研制的一個HG-1700AG27慣性導航裝置、一個HG7805AA03 雷達天線以及2個603E型PowerPC處理板。
2.4 X-47無人機的作動系統[5]

圖4 X-47A無人機多余度飛控與作動系統Fig.4 Redundancy fly and actuation systems of X-47A UAV
X-47無人機由諾·格公司研制,主要型號有X-47A 和X-47B。X-47A 是小尺寸驗證機,X-47B 則是世界上第一種陸基和航空母艦都能使用的無人偵察攻擊機,是X-47A 無人機的發展型。X-47系列無人機同樣采用后掠翼隱身無尾翼結構布局設計,采用4個尾部的邊條升降操控面進行飛行控制,每個機翼安定面后面分別布置內側、外側操控翼面,左右機翼中上部位還分別布置了兩片擾流板。為增加X-47A無人機可靠性,同樣采用了余度技術(見圖4),X-47A無人機也采用了雙余度作動系統控制單元,包括了BAE系統控制公司的2套綜合飛控系統,該系統使用了Power PC 750處理器,具有1553B總線, RS-232以及RS-433等I/O接口,操作系統選用了CsLEOS系統以及BAE 系統公司開發的ARINC-653嵌入式系統。在該環境下諾·格公司自己開發了余度管理、任務管理、導航規律、發動機控制以及液壓、電動及剎車作動裝置的控制等算法和軟件。導航裝置采用了一個SRGPS 和2套霍尼韋爾公司的H-764 GPS/INS單元。受限于開發計劃和重點驗證項目,最初雖考慮了電動作動系統,但基于電能轉換、工作范圍、功率以及響應等限制,仍采用了傳統的液壓作動系統。液壓作動系統包括一個與發動機連接的液壓泵和一個以電驅動液壓泵備份系統,采用MIL-H-83282液壓油,系統壓力可達到3000 psi,液壓作動器是在快鷹(Hawker)水平尾翼作動器基礎上進行改進的,液壓作動器的動作依靠雙余度電液伺服閥進行控制(EHSV)。
X-47的起落架是在A-6E和F/A-18C 基礎上改進而來的,X-47B 還借鑒了F-14 飛機的著艦捕獲鉤方案進行改進設計。
2.5 無人機機載作動系統技術發展趨勢
以上無人機代表著國外最新的研究和應用成果,體現在機載作動系統技術的發展趨勢向著高可靠多余度、智能化、直接力控制、全電傳化等方向發展,具體體現在:
1)高可靠的多余度技術。為保證無人機飛行的可靠性和安全性,大量借鑒了客機及軍機相關技術,作動系統的控制單元均采用多余度,余度配置大都采用雙余度或三余度容錯飛行控制計算機。
2)帶有智能的多功能綜合信息管理。高可靠的多余度控制單元具有任務管理、余度管理、故障診斷及隔離、自主導航等多種功能。
3)多操控面組合控制和直接力控制。非翼身融合的全球鷹和捕食者無人機的“V”形操控面控制,與正常布局的導彈主要區別是,每個方向和升降舵是組合控制,即:每片操控面既起到升降還起到方向控制作用。為增加可靠性,還采用了多個冗余操控面。對于翼身融合的無人飛行器(X-45、X-47),一方面通過機翼后緣的多個內外邊條操控面進行升降和方向控制,為增加飛行器在低空低速下等條件下的機動性和操控性,同時還采用了發動機尾噴管推力矢量控制技術。
4)全電傳化技術。以電傳為主的電動和電靜液作動技術將取代發動機帶動液壓泵單元的液壓作動技術。可以看出:無人機起降裝置、操控面作動系統,采用電動作動技術是可行的。
3 無人飛行器作動系統關鍵技術
3.1 多余度配置及其控制與管理技術 應用余度技術一方面可以使系統達到很高的可靠性,但也會增加飛行系統的復雜性、質量、體積、成本及研制周期,因此,在余度設計時要綜合考慮這些因素,在滿足要求的條件下,系統的余度結構應盡量簡單。從成熟應用的無人機余度配置可以看出,一般采用雙余度和三余度作動系統控制單元。因此,無人機余度配置主要側重研究采用雙余度技術還是三余度技術,同時研究與之對應的操控面余度布局方式以及作動系統余度技術,然后依據冷熱余度工作方式,解決控制過程中的力紛爭問題,以及控制系統中數據和信號傳遞的方式。此外,進行余度配置時還需要考慮采用非相似余度配置技術還是相似余度配置技術。上述全球鷹、捕食者B、X-45、X-47基本都采用了相似余度配置。
多余度飛行控制重點研究多余度計算機的工作方式、計算機與外部接口間的通訊、自檢測系統、作動系統控制和驅動裝置、控制結構與控制律設計等內容。多余度飛行控制技術直接影響系統的可靠性和飛行品質,需要借鑒國內外先進的方案,提高多余度飛行控制技術水平。余度管理的目的是最大程度地提高系統的可靠性,使系統在正常工作時高效率地運行,發生故障后,系統性能降低最小,并對故障瞬態提供保護。
余度管理主要是信號的選擇和故障監控與隔離,在無人機作動系統控制單元中對于信號的選擇可以是中值選擇和平均值選擇。在設計故障監控方法時,主要選擇比較監控和自監控兩種方式。在進行故障隔離與切換時,一般需要研究余度邏輯設計,并采用軟件隔離和硬件切換。
3.2 多操控面組合控制和直接力控制技術
由于高性能無人機飛行操控方式比較復雜,升降和方向控制一般采用控制面的操縱面組合控制,或者是多操縱面與直接力組合的方式。直接力控制技術是對常規飛行器控制技術的發展,它可以直接產生不改變姿態而改變期望航跡的氣動力。這種控制方式通過多個操縱面組合,或多操縱面與發動機推力矢量組合控制實現,直接產生升力和側向力。這些直接力可分為直接升力、直接側向力及推力控制,如圖5所示。在X-45無人機偏航控制過程中,采用了發動機的推力矢量控制及單側機翼上,不同后緣襟翼的組合控制方式,不僅可以有效減小襟翼的偏轉角,還能夠迅速提高機動能力。因此,在研發翼身融合高性能無人機的同時,需要重點解決多個輔助操縱面和推力矢量組合控制的直接力控制技術[6]。

圖5 X-45A無人機的操控面與推力矢量控制方式Fig.5 Control surface layout and thrust vector control method of X-45A UAV
3.3 多余度電動作動器技術
余度技術的另一項核心是要重點研究作動器的余度技術。國內外作動器研制經驗表明:改進作動器各組成單元結構和制造工藝,提高可靠性可挖掘的潛力有限,無法滿足載人航天以及飛機大幅增長的可靠性指標要求。受空間布局和傳統戰術導彈慣性思維的影響,目前國內戰術級飛行器很少采用該技術。隨著高性能無人機等項目的展開,需要開展多余度作動技術的研究,多余度電動作動器將會成為研究重點。主要研究同類及不同種類執行機構余度配置技術、力綜合技術、帶有容錯功能的自身故障診斷與隔離技術、多余度執行機構傳動技術等內容。
3.4 推力矢量機構技術
發展高性能無人機將提出自主起降、機動飛行等多種需求,常規氣動布局操控面控制效率低,一般很難滿足這些要求,需研制新型推力矢量執行機構。采用擺動、二元可調噴管或軸對稱推力矢量技術,推力損失小,非常適合高空、長時間、遠距離飛行的高性能無人飛機自主起降及機動等要求。國內外在中大型導彈與火箭、各種航空飛行器上已經大范圍使用擺動噴管及二元可調節噴管技術,在X-45無人機中也采用了二元可調噴管技術。根據未來高性能無人飛行器的需求,需要并行發展二元以及空間軸對稱推力矢量機構和控制技術。主要研究推力矢量機構構型、動密封與熱防護技術、載荷分配及機構動力學、推力矢量作動系統等方面。
3.5 高可靠起降裝置技術
起落架是高性能無人機起飛著陸的主要裝置,無人機在起飛滑跑、著陸接地和地面運動時起落架應能承受并減輕機體受載。起落架還應使無人機在地面運動時具有良好的操縱性和穩定性。為了減少無人機飛行時的阻力,還應保證其收放的靈活性與可靠性。由此可見起落架是工作性能和可靠性直接影響整機的安全。高性能無人機的起落架也不單純是一個結構,而是一種相當復雜的機械系統,需要重點研究緩沖、收放機構構型、剎車、電氣系統、作動系統等。
4 結論及發展思路
作動系統技術是發展高性能無人機重點解決的關鍵技術之一,開發這類作動系統需要及時、長期、系統地開展國外相關技術情報查詢、整理和分析工作,在對國內外高性能無人機機載作動系統研究和應用分析的基礎上提出一些初步發展思路:
1)盡快完成無人機機載多余度電傳作動系統專業技術的體系研究梳理出該類機載多余度電傳作動系統技術體系。
2)隨著高性能無人飛行器、臨近空間飛行器等高價值裝備的研究逐漸深入,單一形式的作動系統不再能滿足系統性能及可靠性要求,應該緊密結合這些項目需求開展多余度作動系統技術研究工作。
3)多軸操控的推力矢量機構及其控制技術,相比傳統的擾流片和燃氣舵推力矢量技術,作為一種很好的直接力控制方式,具有多軸操控的二元推力矢量和空間軸對稱矢量控制系統,效率更高,操控品質更好,應加快相關技術的發展研究。
[1] Aerospace Actuation 2008, Counterpoint Market Intelligence Limited[R].2009.
[2] 美國高空長航時無人機——RQ-4“全球鷹”[M].北京:航空工業出版社,2011,11.
[3] A NASA UAS SupportingLong Duration Earth Science Missions[R].NASA/TM-2007-214614.
[4] Kevin A Wise. X-45 Program Overview and Flight Test Status[C]//.AIAA 2003-6645.
[5] X-47A PEGASUS FLIGHT AND MISSION SYSTEMS DESIGN AND TEST[C]//.AIAA 2003-6628.
[6] Phu Nguyen,Stanley Mak. Simulation of Landing Events for an Unconventional UAV Landing Gear System Using Transient Dynamics Approach[C]//.AIAA 2006-1762.
Technology Development Status of UAV Actuation System
ZHANG Xin-hua
(Beijing Institute of Automatic Control Equipment,Beijing 100074, China)
This article introduces component, application status at home and abroad and development trend of technology of actuation system of high-performance UAV, and analyses key technology of redundancy fly and actuation system, and givens the preliminary idea of the system.
UAV; Control unit of redundancy actuation system; Actuation system
2015 - 03 - 12;
2015 - 04 - 02。
張新華(1972 - ),男,博士,研究員,主要從事伺服控制方面的研究。
TP273
A
2095-8110(2015)03-0055-06
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
