一種基于線性近似的非線性系統(tǒng)模型預(yù)測(cè)控制方法*
2015-03-10 10:33:44蓋俊峰趙國(guó)榮周大旺
航天控制 2015年5期
蓋俊峰 趙國(guó)榮 周大旺
海軍航空工程學(xué)院,煙臺(tái)264001
模型預(yù)測(cè)控制(Model Predictive Control,MPC)是近年來(lái)崛起的一種成功的控制策略。MPC針對(duì)的是有優(yōu)化需求的控制問(wèn)題[1],通過(guò)對(duì)某一性能指標(biāo)的最優(yōu)化來(lái)確定未來(lái)的控制作用[2]。由于現(xiàn)代工業(yè)生產(chǎn)過(guò)程的控制對(duì)象大多具有非線性特征,非線性系統(tǒng)的模型預(yù)測(cè)控制已成為當(dāng)前的研究熱點(diǎn)。而非線性系統(tǒng)預(yù)測(cè)控制的關(guān)鍵問(wèn)題在于如何處理非線性和降低在線計(jì)算量[1]。
非線性系統(tǒng)的設(shè)計(jì)和分析往往比線性系統(tǒng)困難得多,非線性微分方程通常不可能得到封閉形式的解析解,除非經(jīng)過(guò)特殊處理,而傅里葉變換、拉普拉斯變換和疊加原理等適用于線性系統(tǒng)的強(qiáng)有力的數(shù)學(xué)工具都不再適用于非線性系統(tǒng)的控制問(wèn)題。因此,對(duì)于實(shí)際工程操作人員來(lái)說(shuō),最簡(jiǎn)單的方法就是把非線性動(dòng)態(tài)特性線性化,然后再用成熟的線性系統(tǒng)設(shè)計(jì)方法完成對(duì)控制系統(tǒng)的分析和綜合[3]。
文獻(xiàn)[4]用中值定理將非線性系統(tǒng)進(jìn)行線性化處理,用三次樣條函數(shù)來(lái)逼近線性系統(tǒng)的時(shí)變參數(shù),并對(duì)樣條函數(shù)的常值參數(shù)進(jìn)行了辨識(shí);文獻(xiàn)[5]針對(duì)只含輸出非線性環(huán)節(jié)的系統(tǒng)沿期望的輸出軌跡用Taylor級(jí)數(shù)一階展開(kāi)近似線性化,但是該方法不能處理含有輸入非線性環(huán)節(jié)的系統(tǒng)。運(yùn)用Taylor級(jí)數(shù)展開(kāi)法對(duì)非線性系統(tǒng)進(jìn)行線性近似時(shí),要求表征系統(tǒng)模型的輸入輸出函數(shù)必須連續(xù)可導(dǎo),但有些物理系統(tǒng)并不滿(mǎn)足這一假設(shè),因此Taylor級(jí)數(shù)展開(kāi)法對(duì)此不再適用。文獻(xiàn)[6]指出,利用Stirling插值公式對(duì)非線性函數(shù)進(jìn)行線性化處理的精度要高于Taylor一階近似,且不需對(duì)其進(jìn)行求導(dǎo)運(yùn)算,因此對(duì)不滿(mǎn)足連續(xù)可導(dǎo)假設(shè)的非線性系統(tǒng),Stirling插值公式依然適用。
本文受文獻(xiàn)[6]的啟發(fā),針對(duì)一類(lèi)非線性系統(tǒng)(尤其是系統(tǒng)模型的輸入輸出函數(shù)不滿(mǎn)足連續(xù)可導(dǎo)條件的非線性系統(tǒng))設(shè)計(jì)了一種基于線性近似的MPC方案。首先運(yùn)用Stirling插值公式對(duì)非線性函數(shù)進(jìn)行線性近似處理,并將模型預(yù)測(cè)控制性能指標(biāo)重構(gòu)為一個(gè)二次型最優(yōu)化問(wèn)題。最后,通過(guò)對(duì)二次型最優(yōu)化問(wèn)題的求解得到了模型預(yù)測(cè)控制的最優(yōu)控制序列。為了減少計(jì)算量,忽略了線性近似過(guò)程中產(chǎn)生的非線性高階項(xiàng)。仿真結(jié)果表明,該方案能達(dá)到滿(mǎn)意的控制效果,且具有降低控制能量消耗和縮短控制時(shí)間的優(yōu)點(diǎn)。
1 系統(tǒng)模型與問(wèn)題描述
考慮如下的非線性離散系統(tǒng):

其中,x(k)∈Rn為狀態(tài)向量,u(k)∈Rm為控制輸入向量,y(k)∈Rp為輸出向量。f(·)為一連續(xù)的非線性函數(shù),C(k)為一常數(shù)矩陣。
實(shí)際的工業(yè)過(guò)程中,受設(shè)備條件的限制,對(duì)系統(tǒng)的控制量和控制增量都有一定限制,需服從如下的約束條件:
同時(shí),為了避免系統(tǒng)輸出超過(guò)限制量,給出以下的輸出約束:

其中,umin≤umax,Δumin≤Δumax和ymin≤ymax分別為各向量的下界和上界。
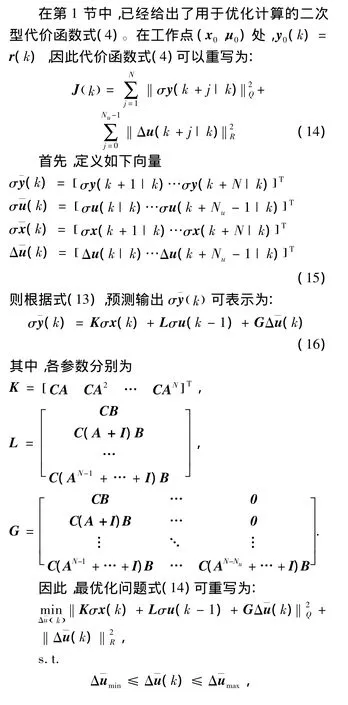
模型預(yù)測(cè)控制是一種迭代最優(yōu)化方法:在每個(gè)采樣時(shí)刻k,測(cè)量或估計(jì)當(dāng)前狀態(tài),然后通過(guò)對(duì)一個(gè)控制代價(jià)函數(shù)的最優(yōu)化來(lái)獲得最優(yōu)輸入向量。對(duì)模型(1),給出以下滿(mǎn)足有限時(shí)域二次型規(guī)則的代價(jià)函數(shù):
2 系統(tǒng)的線性近似
當(dāng)非線性系統(tǒng)式(1)中的f(·)為一連續(xù)可微的非線性函數(shù)時(shí),對(duì)于某些不太嚴(yán)重的非本質(zhì)非線性特性,用Taylor近似方法進(jìn)行分析和設(shè)計(jì),在工作點(diǎn)的某一鄰域大體是正確的,產(chǎn)生的誤差也往往為工程上所接受。而當(dāng)f(·)為一不可微的非線性函數(shù)時(shí),由于不能對(duì)其進(jìn)行求導(dǎo)運(yùn)算,Taylor近似方法在此不再適用。區(qū)別于Taylor級(jí)數(shù)展開(kāi)線性近似方法,用Stirling插值公式對(duì)非線性函數(shù)進(jìn)行線性近似時(shí)無(wú)需進(jìn)行求導(dǎo)運(yùn)算,只需用有限線性運(yùn)算來(lái)逼近該非線性函數(shù)[7-8]。由于Stirling插值公式能對(duì)余項(xiàng)直接進(jìn)行控制,這使得在某些應(yīng)用中其比Taylor近似更具吸引力。如果能選取合適的區(qū)間長(zhǎng)度,可以確保Stirling余項(xiàng)能接近完整Taylor級(jí)數(shù)的高階項(xiàng)[9]。鑒于上述優(yōu)點(diǎn),本節(jié)采用Stirling插值公式法作為線性近似處理的數(shù)學(xué)工具。
下面用Stirling插值公式對(duì)非線性系統(tǒng)(1)進(jìn)行線性近似。首先定義如下函數(shù):


至此,當(dāng)非線性函數(shù)f()·不可微時(shí),非線性系統(tǒng)式(1)可以通過(guò)Stirling插值公式法線性近似為如式(13)的形式。這種形式可為構(gòu)造二次型最優(yōu)化問(wèn)題提供方便,將在下節(jié)詳細(xì)說(shuō)明。
3 二次型最優(yōu)化問(wèn)題的重構(gòu)
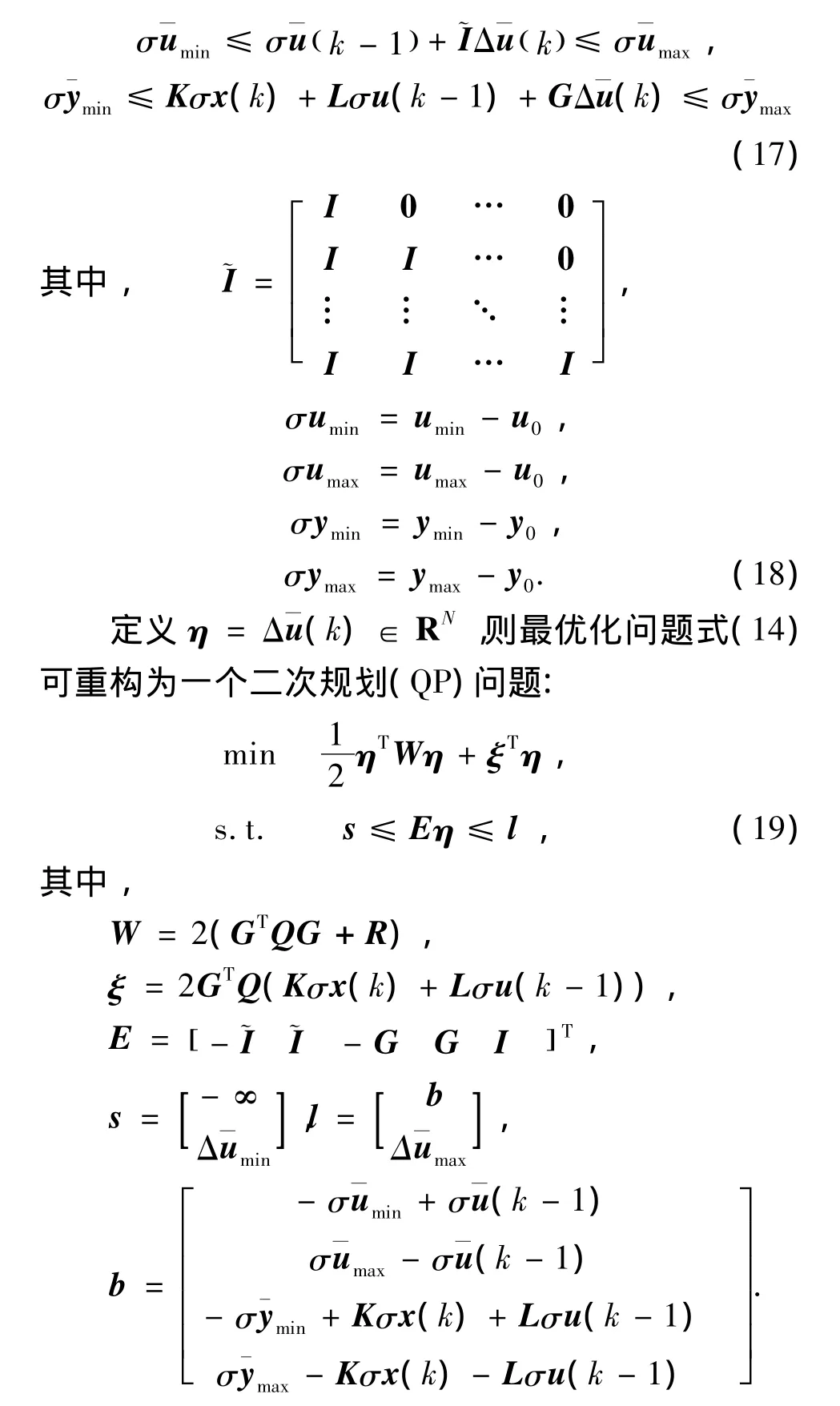
此處,由于Q和R為正定陣,矩陣W也為正定陣,且所有的可行域都為凸的,因此最優(yōu)化問(wèn)題式(19)為一個(gè)凸二次規(guī)劃問(wèn)題。對(duì)二次規(guī)劃問(wèn)題式(19)求解,得到一個(gè)在控制域N上的控制增量向量Δˉu(k),從而可計(jì)算出k時(shí)刻的最優(yōu)控制輸入。
4 仿真分析
本節(jié)選取某非線性對(duì)象系統(tǒng),其非線性函數(shù)f(·)不滿(mǎn)足連續(xù)可微條件,Taylor級(jí)數(shù)展開(kāi)法不再適用于此處,故用Stirling插值公式法對(duì)其進(jìn)行線性近似處理。所選非線性對(duì)象系統(tǒng)描述如下:
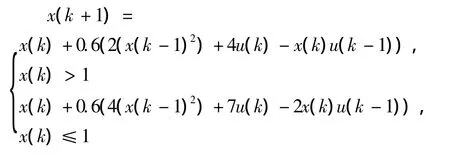
其中,預(yù)測(cè)域N=10,控制域Nu=3,控制時(shí)長(zhǎng)為t=100s。權(quán)值矩陣Q=2.5I,R=0.5I。輸入約束為 -35≤u(k)≤35,控制增量約束為 -40≤Δu(k)≤40,輸出約束為-10≤y(k)≤10。本例的參考輸出軌跡設(shè)置為一個(gè)方波信號(hào)。
本例對(duì)直接基于原非線性模型的情況和基于近似線性模型的情況分別進(jìn)行了仿真,結(jié)果如圖1~3所示。圖1中,Ref為參考輸出軌跡,y1為采用基于原非線性模型的MPC方案時(shí)系統(tǒng)的輸出軌跡,y2為采用基于本文近似線性模型的MPC方案時(shí)系統(tǒng)的輸出軌跡;圖2為2種不同情況下的控制輸入量曲線,其中u1為采用基于原非線性模型的MPC方案時(shí)的控制輸入,u2為采用基于本文近似線性模型的MPC方案時(shí)的控制輸入;圖3中,e1=y1-Ref,e2=y2-Ref,分別表示了采用2種MPC方案時(shí)的系統(tǒng)對(duì)參考輸出軌跡的跟蹤誤差。
仿真過(guò)程中,分別對(duì)2種方法進(jìn)行100步優(yōu)化計(jì)算所消耗的時(shí)間進(jìn)行統(tǒng)計(jì)求均值,可得到2種方法平均每步優(yōu)化計(jì)算所消耗的時(shí)間。
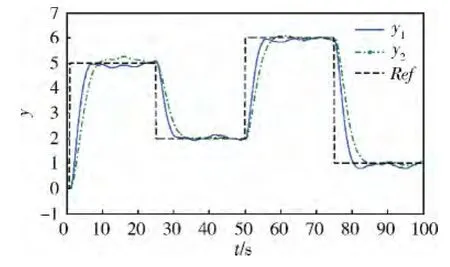
圖1 系統(tǒng)輸出跟蹤曲線
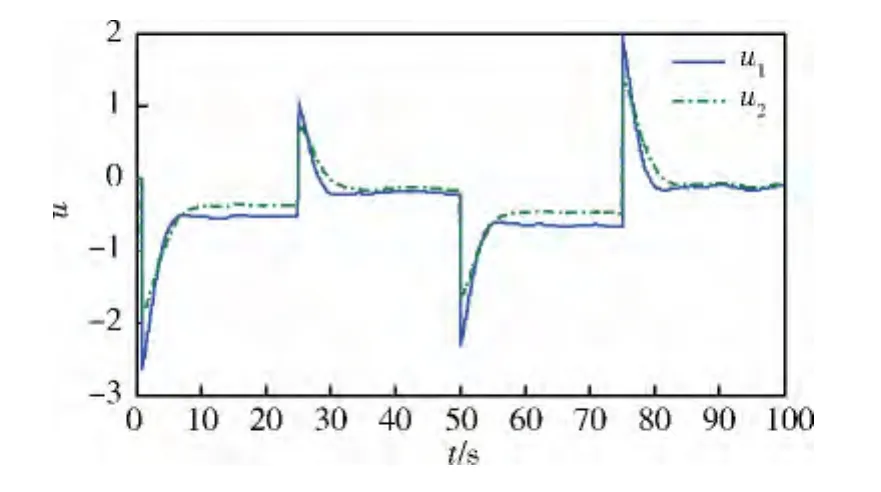
圖2 系統(tǒng)控制輸入曲線
經(jīng)計(jì)算,直接基于原非線性模型的MPC方案消耗時(shí)間為0.04672s;基于本文近似線性模型的MPC方案消耗時(shí)間為0.01925s。
由仿真結(jié)果可以看出,本文提出的方案跟蹤精度要比直接基于原非線性模型MPC方案的跟蹤精度略低。其原因是在對(duì)非線性模型進(jìn)行線性近似處理時(shí),忽略了非線性高階項(xiàng),這必然引入了線性化截?cái)嗾`差,使系統(tǒng)的跟蹤精度降低。但是,與直接基于原非線性模型的MPC方案相比,基于線性近似模型的MPC方案能減少控制能量的消耗,且大大節(jié)省了跟蹤時(shí)間。
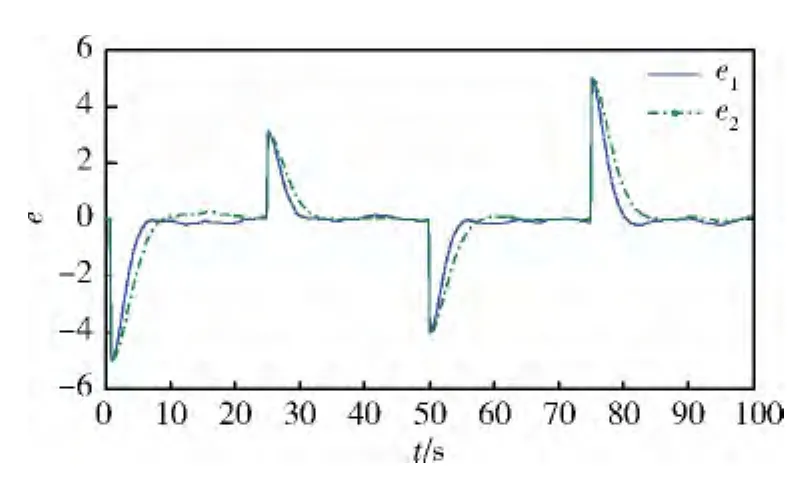
圖3 跟蹤誤差曲線
5 結(jié)論
提出了一種基于線性近似的非線性模型預(yù)測(cè)控制方法。首先運(yùn)用Stirling插值公式對(duì)非線性函數(shù)進(jìn)行線性近似處理,并將模型預(yù)測(cè)控制性能指標(biāo)重構(gòu)為一個(gè)二次型最優(yōu)化問(wèn)題。最后,通過(guò)對(duì)二次型最優(yōu)化問(wèn)題的求解得到了模型預(yù)測(cè)控制的最優(yōu)控制序列。為了降低計(jì)算的復(fù)雜度,該MPC方案忽略了線性近似過(guò)程中產(chǎn)生的非線性高階項(xiàng)。仿真結(jié)果表明,本文的MPC方案能達(dá)到較滿(mǎn)意的次優(yōu)控制效果,同時(shí)能降低控制能量的消耗,并且大幅縮短了控制時(shí)間。本文提出的方法僅為一種啟發(fā)性方法,在后續(xù)的工作中,需要對(duì)其穩(wěn)定性等作進(jìn)一步研究論證。
[1] 席裕庚,李德偉,林姝.模型預(yù)測(cè)控制—現(xiàn)狀與挑戰(zhàn)[J].自動(dòng)化學(xué)報(bào),2013,39(3):222-232.(Xi Yugeng,Li Dewei,Lin Shu.Model predictive control-Status and challenges[J].Acta Automatica Sinica,2013,39(3):222-232.)
[2] 席裕庚.預(yù)測(cè)控制[M].北京:國(guó)防工業(yè)出版社,1993.(XI Yugeng.Predictive Control[M].Beijing:National Defence Industry Press,1993.)
[3] 胡躍明,胡終須,毛宗源,李志權(quán).非線性控制系統(tǒng)的近似化方法[J].控制理論與應(yīng)用,2001,18(2):160-165.(Hu Yueming,Hu Zhongxu,Mao Zongyuan,Li Zhiquan.Approximation methods of nonlinear control systems[J].Control Theory and Applications,2001,18(2):160-165.)
[4] 郭健,陳慶偉,朱瑞軍.一類(lèi)非線性系統(tǒng)的自適應(yīng)預(yù)測(cè)控制[J].控制理論與應(yīng)用,2002,19(1):68-72.(Guo Jian,Chen Qingwei,Zhu Ruijun.Adaptive Predictive Control of a Class of Nonlinear System[J].Control Theory and Applications,2002,19(1):68-72.)
[5] Martin Rau,Dierk Schroder,Model predictive control with nonlinear state space models[C].IEEE,AMC 2002-Maribor,Slovenia,2002,136~141.
[6] 王亞鋒,孫富春,張友安,劉華平.一種跟蹤問(wèn)題中的次優(yōu)非線性預(yù)測(cè)控制算法[J].控制與決策,2009,24(11),1682-1686.(Wang Yafeng,Sun Fuchun,Zhang Youan,Liu Huaping.Suboptimal model predictive control for nonlinear system on tracking problem[J].Control and Decision,2009,24(11):1682-1686.)
[7] Magnus Norgaard,Niels K Poulsen and Ole Ravn[R].Advances in Derivative-Free State Estimation for Nonlinear Systems,Technical report:IMM-REP-1998-15(revised edition),Technical University of Denmark,Denmark,April 7,2000.
[8] Schei T S.A finite difference method for linearization in nonlinear estimation algorithms[J] .Automatica ,1997,33(11):2051-2058.
[9] Magnus Norgaard,Niels K Poulsen and Ole Ravn.New developments in state estimation for nonlinear systems[J].Automatica,2000,36(11):1627-1638.
猜你喜歡
童話(huà)王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
