稀薄大氣層內目標群運動特征及識別研究*
2015-03-09 06:48:35趙濤,霍超穎,任紅梅等
現代防御技術 2015年2期
?
稀薄大氣層內目標群運動特征及識別研究*
趙濤1,2,霍超穎1,任紅梅1,殷紅成1,2
(1.電磁散射重點實驗室,北京100854; 2.中國傳媒大學 信息工程學院, 北京100024)
摘要:針對稀薄大氣中真假彈頭識別的問題,通過對彈頭及輕誘餌目標群在稀薄大氣層中的運動特性的仿真,提取了誘餌相對彈頭的運動特征,分析了稀薄大氣層內彈頭與誘餌相對位置和相對速度的變化規律,提出了在稀薄大氣層內利用相對位置和相對速度的二維特征識別真假彈頭的新思路。典型算例的仿真結果驗證了這種思路的可行性。
關鍵詞:稀薄大氣;彈頭;誘餌;相對運動特性;目標識別
0引言
彈道目標群以一定再入角進入大氣層時,各物體由于大氣阻力作用而呈現出減速特性,因此,質阻比(彈道系數)是決定再入目標減速特性的重要參數。已往較多工作集中于基于再入到稠密大氣層的彈頭及其誘餌目標群的減速特性和質阻比進行真假目標識別的研究,其中文獻[1]詳細推導了彈道系數的表達式;文獻[2]探討了再入飛行器軌跡最優估計;文獻[3-7]對再入飛行器質阻比進行了估計,比較了再入彈頭及其誘餌目標群的質阻比的特征差異,驗證了在一定高度下實現對彈頭及其誘餌群的識別的可行性。
雖然以往的研究表明,利用質阻比進行識別有一定的局限性,高度越高,空氣越稀薄,利用質阻比區分出真彈頭與誘餌的可能性越小,且質阻比估計濾波算法的精確度易受初始值敏感和收斂性能影響,特別是在大氣阻力變化劇烈時估計誤差更大,進而影響真假目標的識別;但是,隨著雷達探測精度的提高,雷達傳感器甚至有可能在超出100 km高度的稀薄大氣層內感知到真假目標姿態和質心運動的差異,這些差異可作為目標識別的依據。目前僅有較少的公開文獻研究報道稀薄大氣層內彈頭和誘餌的大氣減速特征,其中文獻[8]對稀薄大氣層中彈頭和誘餌的速度特征進行了分析,利用雷達高精度多普勒測速及軌跡估計信息提出了稀薄大氣層內的輕誘餌速度識別方法;文獻[9]對再入彈道目標在稀薄大氣中的相對運動差異的識別可行性進行了分析,分別基于運動狀態和質阻比差異進行識別仿真,但隨著識別時間段的增加,利用濾波算法計算兩目標相對速度的固有誤差會逐漸增大,導致識別錯誤。
本文基于美國1976年發布的標準大氣模型[10],通過對稀薄大氣層內彈頭及輕誘餌的運動特性的仿真分析發現,在稀薄大氣層內,輕誘餌與彈頭之間的相對運動特征具有一定差異,在目前雷達探測精度大幅度提高的情況下,有可能將輕誘餌的這種運動特征差異提取出來的。為此,結合目標群間相對位置和相對速度特征的差異,提出在稀薄大氣層內提取新的二維特征進行彈頭真假目標識別的思路。仿真實驗證明了本文方法在真假目標識別中的有效性。
1稀薄大氣層中彈頭及誘餌運動特性的計算
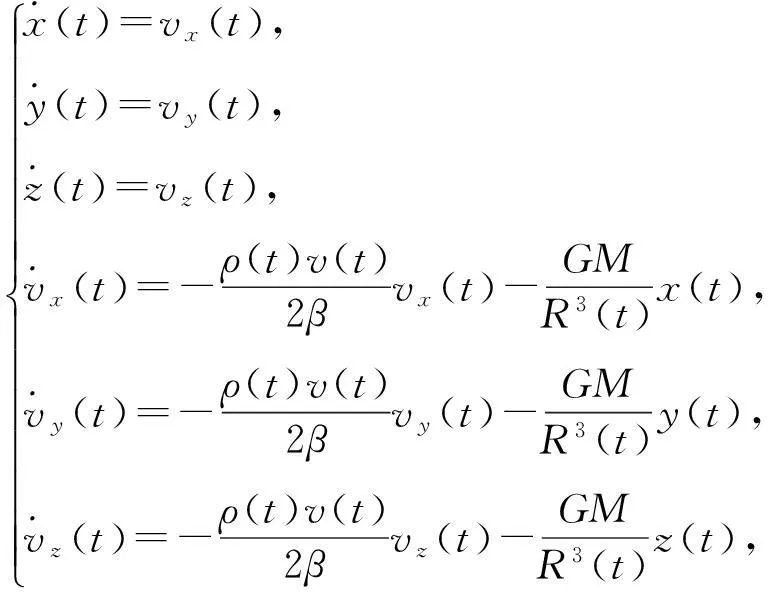
在稀薄大氣層中,彈頭主要受地球引力和大氣阻力的作用,可推算出目標運動的微分方程[2]:
(1)
(2)

(3)
(4)
式中:ρ0為海平面上的標準大氣密度;L為大氣按海拔高度所分的層號;Z為彈道導彈位勢高度;r0為地球極地半徑;H為海拔高度。通過對不同的高度進行分段建模,可獲得200 km高度范圍內的大氣密度計算公式。
2特征提取與分類器識別
2.1相對位置和相對速度特征的提取
當誘餌通過大氣層下降時,在大氣阻力的作用下,重量較輕的誘餌將比真彈頭更快地減速,這一效應被稱為“大氣過濾”。應用“大氣過濾”效應產生的減速特性進行識別是再入段常用的識別方法,這種識別方法提取的特征量多為上面提到的彈道系數β。彈道系數特征僅在稠密大氣層中表現明顯,且受雷達測距、測速和濾波算法估計的誤差影響,因此彈道系數特征用于識別受高度條件和估計精度的限制。而在目標地基相控陣雷達多普勒測速精度大幅度提高的情況下完成有可能估計再入彈道在稀薄大氣層內目標群各目標的位置和速度。因此,可以通過各個目標之間的相對運動特征差異來識別彈頭和誘餌,包括彈頭和誘餌之間的相對位置差異和相對速度差異等。
二維特征量Li表示為彈道目標群第i個誘餌與彈頭之間的相對運動差異,Lij表示為兩誘餌之間的相對運動差異,表示為
Li=(ri-r0,vi-v0),i=1,2,…,N,
(5)
Lij=(ri-rj,vi-vj)i,j=1,2,…,N,i≠j,
(6)
式中:N為再入彈道目標群中的誘餌目標的個數;r0(t),v0(t)分別為再入稀薄大氣層后彈頭在某一時刻的位置和雷達徑向速度;ri(t),vi(t)和rj(t),vj(t)分別表示為再入稀薄大氣層后第i和j個誘餌在某一時刻的位置和雷達徑向速度。
2.2識別準則確定
在統計學習理論基礎上發展的一種模式識別方法——支持向量機(support vector machine, SVM),在解決小樣本、線性及高維模式識別問題中表現出特有的優勢。考慮二維2類線性可分情況,所謂最優分類線就是要求分類線不但能將2類無錯誤地分開,而且使2類的分類間隙最大。
設線性可分樣本集Li=(Δri,Δvi),則二維線性判別函數表達式為
f(L)=wTL+w0,
(7)

3稀薄大氣層彈頭及誘餌相對運動特征仿真
3.1仿真1:彈頭與誘餌在200 km高度時具有不同的初始再入速度,誘餌質阻比相同
仿真條件:射程選為2 500 km;彈頭速度為4 028 m/s,彈頭質阻比為6 000 kg/m2;4個輕誘餌質阻比相同,均為0.12 kg/m2,速度分別為4 030,4 033,4 026,4 023 m/s。
圖1是不同再入速度的誘餌和彈頭的相對位置差隨彈頭時間高度的變化曲線,圖2是不同再入速度的誘餌和彈頭的徑向速度差隨彈頭時間高度的變化曲線。
由圖1可知,當輕誘餌初始再入速度小于彈頭時,誘餌與彈頭之間的相對位置差越來越大,而且初始速度差異越大,相對位置差的變化就越快。例如,誘餌速度相對于彈頭速度慢5 m/s時,相對位置差在很短的時間內就可以達到30 m以上;反之,當輕誘餌初始再入速度大于彈頭時,先是誘餌與彈頭之間位置差越來越大,但是由于大氣對輕誘餌的減速特性,彈頭的徑向速度逐漸大于誘餌的徑向速度,誘餌與彈頭之間位置差也逐漸減小,直到彈頭超過誘餌,且相對位置又越來越大。
由圖2可知,當輕誘餌初始再入速度小于彈頭時,誘餌與彈頭之間的相對速度差越來越大;反之,當輕誘餌初始再入速度大于彈頭時,相對速度差先是越來越小,直到彈頭的再入速度和誘餌再入速度一樣,之后彈頭超過誘餌,相對速度差越來越大。
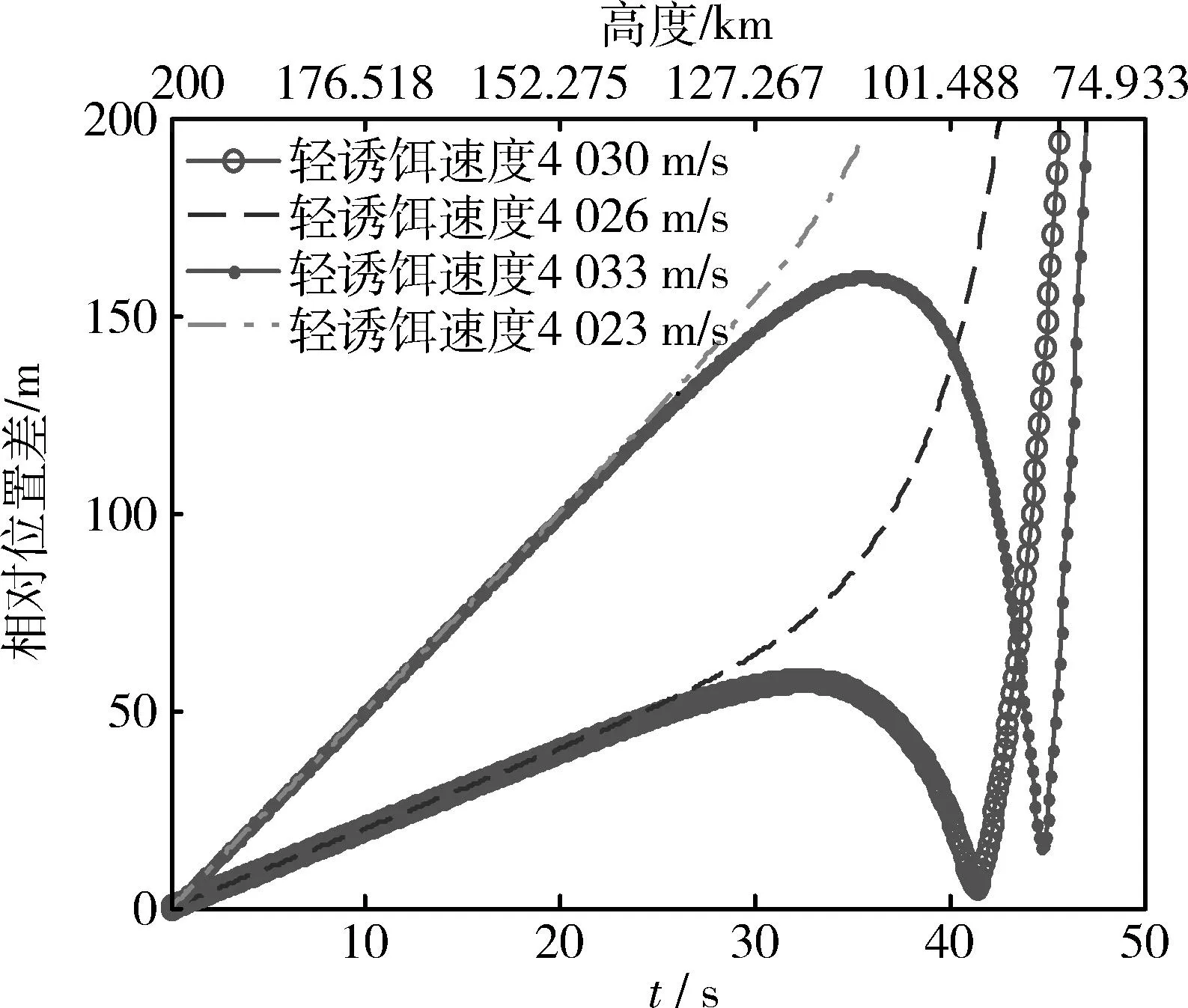
圖1 不同再入速度的誘餌和彈頭相對位置差 隨彈頭時間高度的變化Fig.1 Relative location change between the decoy with different reentry velocitiesand warhead with the time and height of the warhead
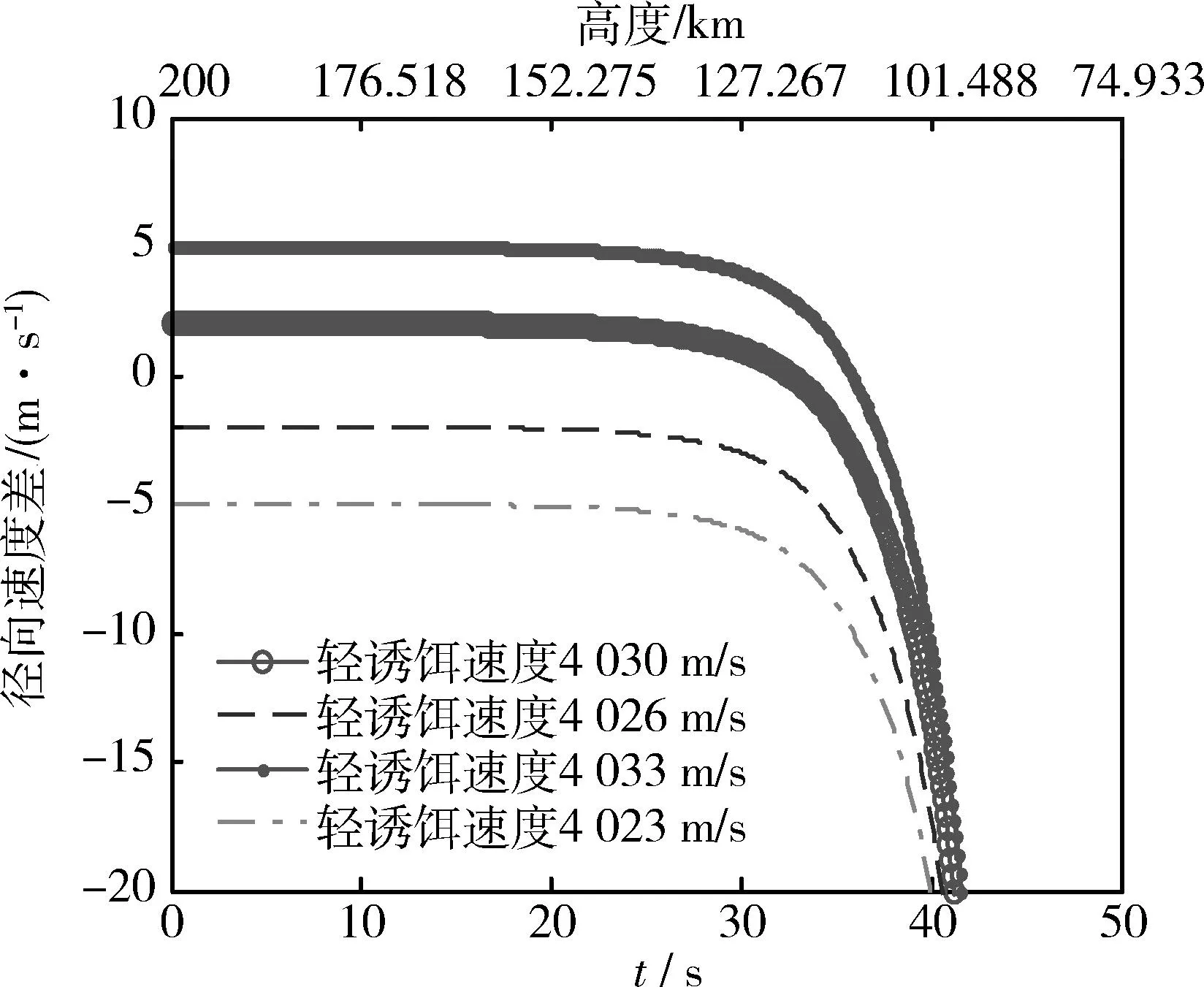
圖2 不同再入速度的誘餌和彈頭徑向速度差 隨彈頭時間高度的變化Fig.2 Radial velocity change between the decoy with different reentry velocities and warhead with the time and height of the warhead
以上分析表明,不管彈頭再入到200 km時的速度是大于誘餌還是小于誘餌,最終彈頭的再入速度都能夠超過輕誘餌,相對位置差和相對速度差都越來越大,且變化越來越快。該仿真試驗說明了輕誘餌與彈頭之間的相對位置差異和相對速度差異可作為識別真假彈頭的識別特征量。
圖3給出了200 km以下高度彈頭與其中2個輕誘餌、誘餌之間的相對位置差-徑向速度差二維特征的分布圖。根據圖3中每2個目標之間的二維特征量Lij,由文獻[13]中的SVM算法可以得到目標之間的最優化線性分類器的判決表達式為
f(L)=-w1Δri+w2Δvi+w0,
(8)
識別準則為
i=1,2,…,N.
圖3 彈頭與不同再入速度的兩誘餌的二維特征 (相對位置差—徑向速度差)分布圖Fig.3 Two-dimensional feature (relative location and radial velocity) distributing chart of warhead and two decoys with different reentry speeds
因此,基于質阻比相同,具有不同再入速度的輕誘餌的運動特征,利用線性分類器可以將輕誘餌與輕誘餌之間的相對運動特征區分出來,從而實現對輕誘餌的排除。
3.2仿真2:彈頭與各誘餌在200 km高度時具有相同的再入速度,誘餌質阻比不同
仿真條件:射程選為2 500 km;彈頭質阻比為6 000 kg/m2,初始速度為4 028 m/s;輕誘餌質阻比分別為2.55,1,0.5,0.12 kg/m2,初始速度為4 028 m/s。
圖4是不同質阻比的誘餌和彈頭的相對位置差隨彈頭時間高度的變化曲線;圖5是不同質阻比的誘餌和彈頭的徑向速度差隨彈頭時間高度的變化曲線。
圖4 不同質阻比的誘餌和彈頭相對位置差 隨彈頭時間高度的變化Fig.4 Relative location change between the decoywith different Mass-to-Drag andwarheadwith the time and height of the warhead
圖5 不同質阻比的誘餌和彈頭徑向速度差 隨彈頭時間高度的變化Fig.5 Radial velocity change between the decoy with different Mass-to-Drag and warhead withthe time and height of the warhead
由圖4可知,彈頭和誘餌同時從200 km高度再入大氣層時,誘餌的質阻比越大,彈頭與誘餌之間的相對位置達到某一固定值所需的時間就越長,例如相對位置差達到20 m時,質阻比為0.12 kg/m2的輕誘餌大概需要24 s,而質阻比為2.55 kg/m2的輕誘餌則需要36 s的時間;也就是說在大約110 km的高度上,在所仿真的目標中最大質阻比(2.55 kg/m2)的輕誘餌相對位置差可達20 m;
由圖5可知,誘餌的質阻比越大時,彈頭與誘餌之間的相對速度達到某一固定值所需的時間就越長,例如相對速度差達到10 m/s時,質阻比為0.12 kg/m2的輕誘餌大概需要27 s,而質阻比為2.55 kg/m2的輕誘餌則需要39 s的時間;也就是說在大約105 km的高度上,在所仿真的目標中最大質阻比(2.55 kg/m2)的輕誘餌相對速度差可達10 m/s;
圖6給出了200 km以下高度彈頭與其中兩個輕誘餌、誘餌之間的相對位置差-徑向速度差二維特征的分布圖。類似于仿真1中的線性分類器,也可以將輕誘餌與輕誘餌之間的相對運動特征區分出來,從而實現對輕誘餌的排除。
綜上,在誘餌再入速度不同或質阻比不同的情況下,彈頭-輕誘餌和輕誘餌-輕誘餌之間的相對位置差和徑向速度差在二維特征平面上的分布均有明顯差異,利用線性分類器可以將輕誘餌與輕誘餌之間的相對運動特征區分出來,從而實現對輕誘餌的識別。
圖6 彈頭與不同質阻比的兩誘餌的二維特征 (相對位置差—徑向速度差)分布圖Fig.6 Two-dimensional feature (relative location and radial velocity) distributing chart of warhead and two decoys with different Mass-to-Drag
4結束語
雷達探測精度的提高使得有可能在200 km以下的高度利用相對運動差異從導彈目標群中識別出輕誘餌,并將其排除。研究結果驗證了本文提出的在稀薄大氣層內利用彈頭與誘餌的相對位置和相對速度作為二維特征識別真假彈頭的思路是可行的,而且避開了以往通過純粹參數估計再入目標質阻比中的動態收斂過程,從而可取得更好的識別效果。
本文只是對基于相對位置和相對速度的識別方法進行了初步的探索,而有關時間開銷及其對整個武器識別響應時間的影響等問題,涉及到本文方法的具體工程應用,與傳感器、武器系統的狀態等因素有關,將在后續的工作中繼續研究。
參考文獻:
[1]CATALARRO S F, SCHNEIDER H. Determination of Weight-to-Drag Ratio from Radar Measurements[R]. AD401488, 1963.
[2]MEHRA R K. A Comparison of Several Nonlinear Filters for Reentry Vehicle Tracking[J]. IEEE Trans. On Automatic Control, 1971, AC-16(4): 307-319.
[3]JESIONOWSKI R, ZARCHAN P. Comparison of Filtering Options for Ballistic Coefficient Estimation[R]. ADA355740, 1998.
[4]楊華波, 張士峰, 蔡洪. 再入飛行器彈道系數的自適應估計[J]. 現代防御技術, 2003, 31(5): 18-22.
YANG Hua-bo, ZHANG Shi-feng, CAI Hong. Adaptive Estimation of Trajectory Coefficient for Reentry Aerocraft[J]. Modern Defense Technology, 2003, 31(5): 18-22.
[5]金文彬, 劉永祥,黎湘,等. 再入目標質阻比估計算法研究[J]. 國防科技大學學報, 2004, 26(5): 46-51.
JIN Wen-bin, LIU Yong-xiang,LI Xiang, et al. Research on Estimation of Mass-to-Drag Ratio of Reentry Objects[J]. Journal of National University of Defense Technology, 2004, 26(5): 46-51.
[6]張泓. 再入目標彈道系數的估計、辨識、建模及其數學仿真研究[D]. 長沙: 國防科技大學研究生院, 2006.
ZHANG Hong. Estimate, Discriminate, Modeling and Mathematics Simulation Research of Ballistic Coefficient for Reentry Object[D]. Changsha: Graduate School of National University of Defense Technology, 2006.
[7]胡國旭, 姚漢英, 錢李昌,等. 基于RK-UKF算法的再入目標質阻比估計[J]. 空軍雷達學院學報, 2011, 25(6): 404-408.
HU Guo-xu, YAO Han-ying, QIAN Li-chang, et al. Estimation of Mass-to-Drag Ratio of Reentry Objects Based on RK-UKF Algorithm[J]. Journal of Air Force Radar Academy, 2011, 25(6): 404-408.
[8]唐毓燕, 黃培康. 稀薄大氣層內輕誘餌速度識別法[J]. 系統工程與電子技術, 2008, 30(5):835-838.
TANG Yu-yan, HUANG Pei-kang. Light Decoy Velocity Recognition Method in Thin Atmosphere[J]. System Engineering and Electronics, 2008, 30(5): 835-838.
[9]宗志偉. 再入彈道目標跟蹤與質阻比識別方法研究[D]. 長沙: 國防科技大學研究生院,2010.
ZONG Zhi-wei. Research on Tracking and Discrimination Methods Based on Mass-to-Drag Ratio for Reentry Ballistic Targets[D]. Changsha: Graduate School of National University of Defense Technology, 2006.
[10]NORMAN S, SIDNEY T. U. S. Standard Atmosphere. 1976[R]. ADA035728,U.S. Air Force, Washinton, 1976.
[11]VAPNIK V. An Overview of Statistical Learning Theory[J]. IEEE Transactions on Neural Networks, 1995, 10(5): 988-999.
[12]張學工. 關于統計學習理論與支持向量機[J]. 自動化學報, 2000, 26(1): 32-42.
ZHANG Xue-gong. Introduction to Statistical Learning Theory and Support Vector Machines[J]. Acta Automatica Sinica, 2006, 26(1): 32-42.
Motion Characteristic and Recognition Research for Target Group in Thin Atmosphere
ZHAO Tao1,2, HUO Chao-ying1, REN Hong-mei1, YIN Hong-cheng1,2
(1.National Electromagnetic Scattering Laboratory, Beijing 100854, China;2.Communication University of China, Information Engineering School, Beijing 100024, China)
Abstract:Aiming at the missile recognition problem in thin atmosphere, the decoy’s motion feature relative to warhead is extracted, and the trend of relative location and relative velocity between warhead and decoys is analyzed on the basis of the simulation of the motion characteristic of warhead and light decoy in thin atmosphere. Then a new idea that the real or false warhead can be recognized by two-dimensional feature comprised of relative location and relative velocity in thin atmosphere is proposed. The feasibility of this idea is verified by simulation results with some typical examples.
Key words:thin atmosphere; warhead; decoy; relative motion characteristic; target recognition
中圖分類號:TJ761.3;TN972;TP391.9
文獻標志碼:A
文章編號:1009-086X(2015)-02-0137-05
doi:10.3969/j.issn.1009-086x.2015.02.022
通信地址:100854北京市142信箱207分箱E-mail:zhaot717@163.com
作者簡介:趙濤(1986-),男,湖北洪湖人。博士生,研究方向為雷達成像及目標識別。
基金項目:973課題(2010CB731905)
* 收稿日期:2014-01-15;
修回日期:2014-03-28