直驅風機三相短路電流特性分析
2015-03-07 05:40:43宋國兵常仲學王晨清李端禎豆敏娜劉凱
西安交通大學學報 2015年10期
宋國兵,常仲學,王晨清,李端禎,豆敏娜,劉凱
(1.西安交通大學電氣工程學院, 710049, 西安;2.ABB(中國)有限公司研究中心, 100015, 北京)
?
直驅風機三相短路電流特性分析
宋國兵1,常仲學1,王晨清1,李端禎1,豆敏娜1,劉凱2
(1.西安交通大學電氣工程學院, 710049, 西安;2.ABB(中國)有限公司研究中心, 100015, 北京)
為了深入分析直驅風機的故障特征,提出了直驅風機的網側變流器簡化模型和含卸荷電路的控制器外特性模型。網側變流器是一個控制作用下的電能平衡系統,主要研究元件的功能和外特性,忽略網側變流器的復雜結構,解析直驅風機的短路電流,實際是分析風機端電壓跌落作用下的三相電流響應規律。與詳細模型進行對比驗證,結果表明:當卸荷電路不投入時,直驅風機短路電流穩態值與其輸出功率和電壓跌落程度有關,除含有工頻分量外還有與控制參數相關的衰減頻率分量,短路電流呈現先逐漸增大后再減小到穩態值的趨勢,隨著電壓跌落程度的加深,短路電流最大值增加且達到最大值的時間也增加,暫態衰減過程延長;當卸荷電路投入時,短路電流為變流器輸出電流的上限。提出的方法有效表征了直驅風機故障特性,對分析逆變型分布式電源的故障特征及其繼電保護相關問題具有借鑒意義。
繼電保護;直驅風機;卸荷電路;三相短路電流
近年來,直驅風機因其眾多優點在電力系統中得到了大量應用[1],隨著接入系統的風電容量不斷提高,其對電網造成的影響已經不可忽略[2-3]。繼電保護作為電力系統安全可靠運行的第一道防線,當電網發生故障時能夠快速有效地識別并切除,對于電網的正常運行具有重要意義。
故障特征分析是繼電保護研究的基礎,在風電故障特征分析的3種方法中[4],目前還僅僅停留在仿真的層面,鮮有文獻通過相應的人工實驗和故障錄波驗證仿真,也沒有理論推導直驅風機短路電流的表達式。各種仿真的目的大致可以分為2類:①給出故障后直驅風機各電氣量的波形,定性地說明對繼電保護的影響[5-6];②根據直驅風機的故障特征優化低電壓穿越控制策略[7-9]。文獻[5]仿真了單臺直驅風機故障情況下的電流及其他電氣量的變化情況,并給出因為變流器的隔離作用使得電網和風機之間相互影響不大的結論。文獻[6]仿真了不對稱短路情況下的各相短路電流以及零序電流,并分析了對繼電保護的影響。文獻[7-8]仿真了故障后在不同情況下直驅風機的有功、無功功率、電流和直流母線電壓,并說明了低電壓穿越的有效性。文獻[9]提出了直驅風機新的控制算法,指出電流控制快于電壓控制。繼電保護關注的是短路電流的分量及其頻率、衰減速度等,但仿真并不能得到這些信息,從而不能滿足繼電保護的相關需要。理論推導即能定性地解析出相關短路電流的分量和變化規律,也能定量地給出各分量的大小等,所以對直驅風機短路電流的理論解析必不可少。
因為直驅風機是通過背靠背的變流器并入電網,所以其故障特征的分析重點必然落在網側變流器上。當系統發生故障時,相關控制及低電壓穿越策略作用于網側變流器,導致其暫態成為一個復雜的強耦合高階時變過程,這樣數學解析其短路電流表達式就需要合理的近似簡化。
基于此,本文首先對網側變流器及其控制進行了相應簡化,然后根據變流器輸入輸出電能守恒,列寫相關方程,推導了直驅風機的短路電流近似表達式,在此基礎上分析了短路電流的相關特性。PSCAD /EMTDC仿真驗證了結論的正確性。
1 網側變流器簡化
工程中對于復雜的耦合系統需要解耦控制,這樣不但避免了各被控量之間的相互干擾,同時也為理論分析帶來了方便。在分析高階系統時,一般根據閉環極點的概念將其簡化成二階系統[10]。
1.1 網側變流器的特點
變流器的復雜性主要在于其控制電路的復雜性,對于電力系統工作者,關心的是元件的功能和外特性,忽略網側變流器的復雜結構,其簡化的拓撲結構如圖1所示。
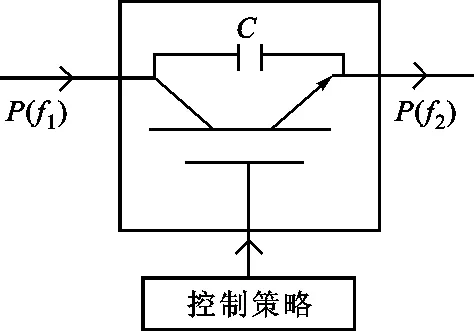
圖1 變流器簡化拓撲結構圖
根據圖1,網側變流器的特點可以總結如下。
(1)電能變換。網側變流器的主電路實際是一個功率變換器件,功能是將某頻率的電能變換成另一頻率的電能。當忽略變流器的開關損耗時,滿足P(f1)=P(f2),即變流器滿足電能平衡。
(2)特性受控。除了主電路外,變流器還有控制電路,而正是控制電路決定了變流器的輸出特性,所以變流器的暫態特性主要取決于變流器的控制策略。
綜上,網側變流器實際是一個控制作用下的電能平衡系統,解析直驅風機的短路電流,實際是分析機端電壓跌落作用下的三相電流響應規律,即
(1)
式中:φ為a、b、c,表示a、b、c三相;K=[k1,k2,k3,…,kn]T,表示變流器控制電路的n個控制參數。式(1)表明,不同的控制策略及參數和機端電壓跌落程度將導致短路電流特性的差異。
1.2 網側變流器的解耦控制
目前,變流器的控制都是基于dq旋轉坐標軸設計的,其一般采用電網電壓矢量定向控制,當電壓矢量定向于d軸時,有
(2)
式中:us為電網電壓;ud為電網電壓的直軸分量;uq為電網電壓的交軸分量。
此時網側變流器發出的有功、無功功率可以表示為
(3)
式(3)實現了直驅風機有功、無功功率的解耦控制。當電網電壓一定時,有功功率與id成正比,無功功率與iq成正比,所以通常id被稱為有功電流,iq被稱為無功電流。當電網正常運行時,直驅風機不需要向電網發出無功功率,即iq=0,也就是說電網運行在單位功率因數。當電網發生故障時,風機將按相關標準重新給定iq的參考值,以向電網注入無功功率來支撐電網電壓[11]。
1.3 控制的降階處理

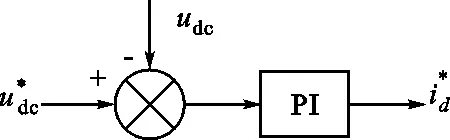
圖2 直流電壓外環控制示意圖
根據直流電壓外環可得
(4)


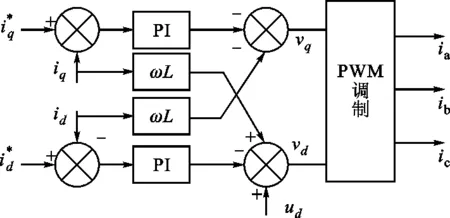
圖3 電流內環解耦控制示意圖
根據電流內環可得
(5)
(6)
2 短路電流的推導
網側變流器經過解耦之后,要解析iφ就必須首先求解id和iq,公式如下
(7)
當式(7)求解完成之后就可以通過派克逆變換得到iφ了。
將有功電流id、無功電流iq看成二階響應處理,首先需要將二者寫成標準的二階微分方程形式[10]
(8)
然后根據式(8)就可以直接寫出響應表達式,進而推導出三相電流的表達式。
2.1 有功電流
實際上,在機端電壓跌落的過程中,風機會通過槳距角控制來調節輸出功率,但這個過程相對較慢,在下面的推導中近似認為風機輸出功率不變。
忽略變流器的功率損耗,網側變流器的功率平衡方程式為
(9)
式中:P為直驅風機輸出功率;C為直流母線電容。
對式(4)兩邊求導并結合式(9),可得
(10)
對式(10)求導

(11)
(12)

2.2 無功電流
根據文獻[12],有
(13)
式中:L、R為網側濾波器的等效電感和電阻。式(13)實際是網側變流器并網后經過派克變換后的KVL方程。
結合式(6)、式(13),忽略濾波器電阻R并對iq求導,得
(14)
(15)
式中:β=arctan((1-ξ2)1/2/ξ),ξ=kip/2(Lkii)1/2。
無功電流的參考值滿足[11]
(16)
式中:ud*為網側電壓標幺值;IN為直驅風機的額定電流。
2.3 三相電流
已知網側變流器的有功、無功電流,根據派克逆變換,就可以將dq旋轉坐標系的電流變換為abc三相坐標系的電流[13],表達式如下
(17)
式中:p-1為派克逆變換矩陣。所以有


(18)
當φ為a時,θ=θ0,θ0為故障時刻的電流相位;當φ為b時,θ=θ0-120°;當φ為c時,θ=θ0+120°。
2.4 低電壓穿越過程中的短路電流
以上推導得到的短路電流表達式實際是機端電壓跌落程度不大的條件下得出的,當直驅風機的卸荷電路動作后將不再成立。這是因為直驅風機網側變流器的通流能力是一定的,當電網發生擾動時,如果電壓跌落幅度不大,則短路電流在變流器的通流能力內,此時風機產生的電能可全部通過網側變流器輸出,直流側電容兩端的電壓波動不足以使卸荷電路投入。當機端電壓跌落幅度較大時,限于變流器的通流能力,直流母線電壓大幅上升,這時通過控制投入卸荷電路,吸收多余能量,以保證直流母線電壓穩定。所以卸荷電路動作后,直驅風機三相短路電流的暫態過程由于網側變流器的通流能力而被強行限制,其值就是變流器的最大輸出電流。
此時,有功電流id滿足
(19)
三相電流iφ滿足
(20)
式中:θ的取值同式(18)。
3 短路電流特性分析
3.1 有功電流
暫態特性:據二階系統的動態響應性能指標,最大超調量σp可以表征暫態電流的最大值,峰值時間tp可以描述暫態電流的響應速度及頻率。根據式(12),有功電流最大超調量和峰值時間與網側電壓降落程度Δud的關系如圖4所示。
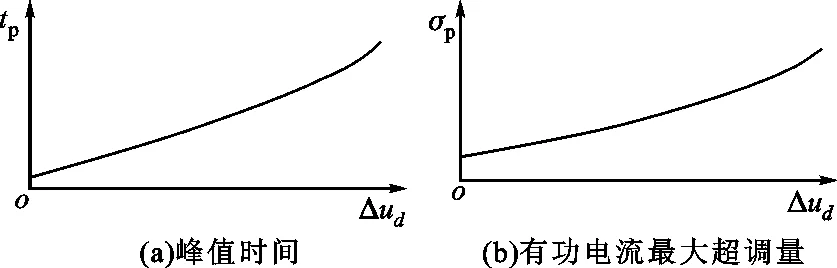
圖4 tp和σp與Δud的關系
從圖4可以看出,隨著機端電壓跌落程度的加深,最大超調量和峰值時間增大,表明隨著機端電壓跌落程度的加深有功電流的最大值以及到達最大值的時間都增大。
穩態特性:直驅風機網側變流器通流能力一般為其額定電流的1.5~2.0倍,當電壓跌落到0.2倍的額定電壓以下時風機將脫網,不再為電網提供短路電流[1]。直驅風機的穩態有功電流與機端電壓之間的關系見圖4。
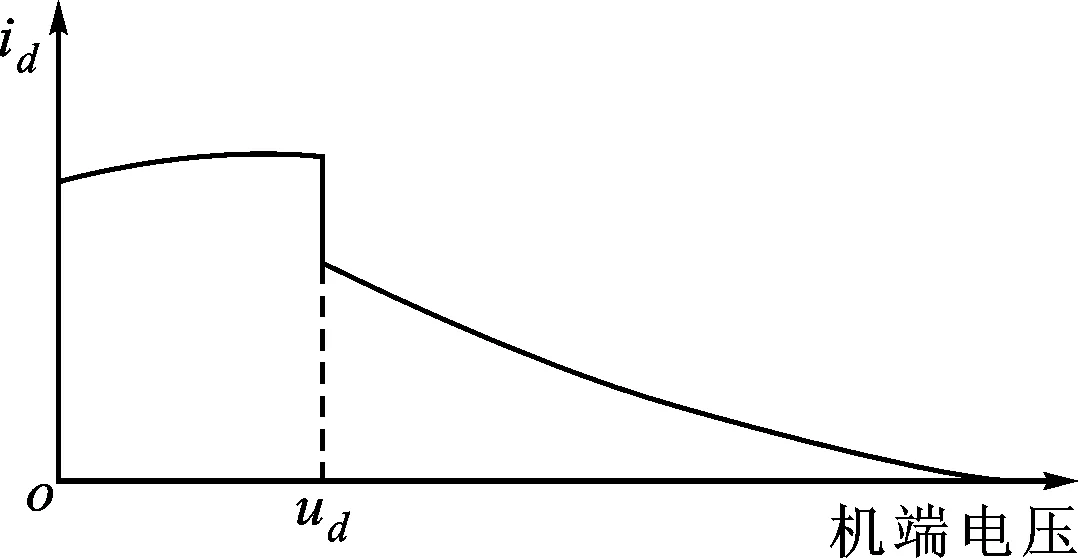
圖5 有功電流幅值與機端電壓的關系
圖5中有功電流在某一電壓處發生突變,這個突變電壓就是短路電流幅值達到了變流器的通流能
力后使得卸荷電路投入的電壓。當機端電壓大于此突變電壓時,卸荷不投入,且隨著機端電壓的增加,風機輸出的有功電流減小;當小于此突變電壓時,卸荷電路投入,隨著機端電壓的減小,有功電流減小。這是因為機端電壓越小,無功電流越大,從而有功電流越小。需要指出的是,突變電壓是根據網側變流器通流能力的不同而不同的。
3.2 無功電流
暫態特性:電流內環相對于電壓外環響應速度非常快,所以無功電流的暫態持續時間相對于有功電流非常短,對三相電流的暫態過程影響較小,此處不做討論。
穩態特性:據式(16)可知,電網發生故障時的直驅風機發出的無功電流與機端電壓的關系見圖6。
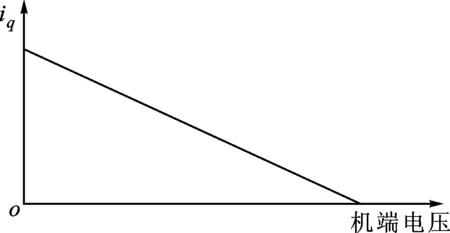
圖6 無功電流幅值與機端電壓的關系
從圖6可以看出,在風機低電壓穿越過程中無功電流與機端電壓成線性關系,電壓跌落程度越大,直驅風機的無功電流越大。
3.3 三相電流
暫態特性:從式(18)可以看出,直驅風機短路電流暫態分量初值與其輸出功率以及電壓跌落程度有關。暫態分量包含兩部分,第一部分衰減時間常數、頻率與變流器電壓外環控制參數、電壓跌落程度有關;第二部分衰減時間常數、頻率與電流內環控制參數相關。
穩態特性:從式(18)可以看出,直驅風機短路電流的穩態分量與其輸出功率以及電壓跌落深度有關。圖7為三相短路電流穩態幅值與機端電壓的關系。
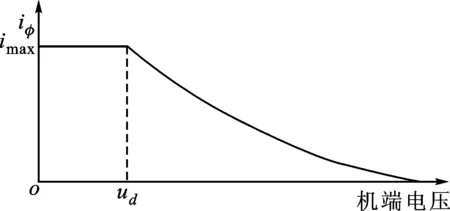
圖7 三相電流幅值與機端電壓的關系
從圖7可以看出,在一定范圍內直驅風機輸出的三相短路電流幅值與機端電壓成反比關系,當機端電壓跌落到某一數值以后,直驅風機輸出電流幅值將保持不變,為變流器的最大輸出電流imax。
4 仿真驗證

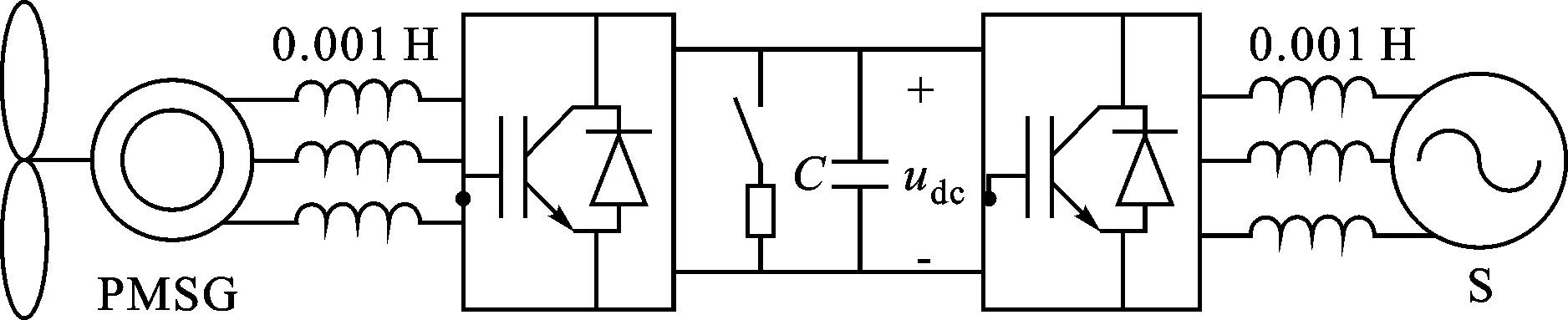
圖8 仿真模型示意圖
4.1 短路電流表達式驗證
通過設置相應三相對稱故障,得到有功電流、無功電流和三相電流波形,并將參數代入理論推導表達式得出相應波形,比較兩組波形,來驗證所得表達式的正確性。
選取兩組控制參數,當t=0.1 s時發生三相電壓跌落,兩組控制參數對應的電壓跌落不同。
(1)直流電壓外環控制參數kup=2、kui=200,電流內環控制參數kip=2、kii=4 000,機端電壓跌落至ud=0.41 kV,波形如圖9、圖10所示。
(2)直流電壓外環控制參數kup=1.5、kui=100,電流內環控制參數為kip=3、kii=5 000,直驅風機機端電壓跌落至ud=0.35 kV,波形見圖11、圖12。
以第二組控制參數為例,直驅風機機端電壓跌落至ud=0.15 kV時,超過了網側變流器的通流能力,卸荷電路投入。此過程的具體波形如圖13所示。
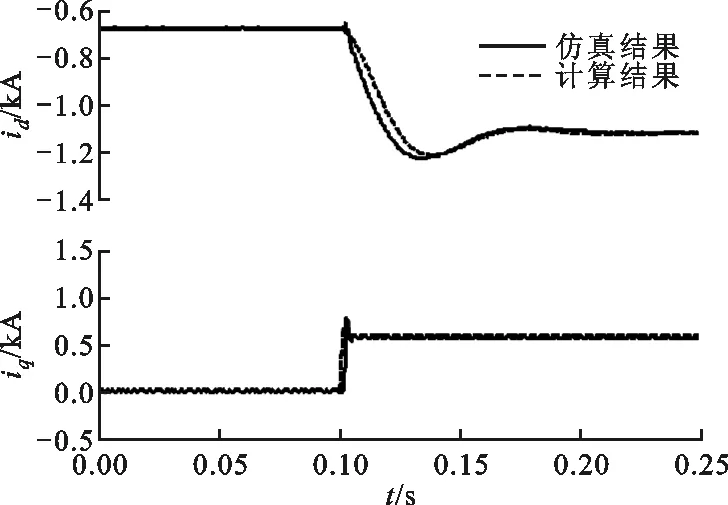
圖9 直驅風機有功、無功電流仿真和計算結果對比
由圖9、圖11可以看出,有功、無功電流基本滿足二階響應,無功電流響應非常快,故障后很快進入穩態,而有功電流響應相對較慢。根據對比,理論計算所得的有功電流和無功電流與仿真所得波形基本重合,說明了推導所得響應表達式的正確性。圖9中有功電流的峰值時間大約為0.13 s,最大超調量大約為9.8%,圖11中有功電流峰值時間大約是0.15 s,超調量大約為11%,說明有功電流的峰值時間和超調量都是隨著機端電壓跌落程度的加深而增大的。

圖10 直驅風機三相電流及a相電流相對誤差
由圖10、圖12可以看出,理論推導所得電流與仿真所得三相短路電流之間存在誤差。造成誤差的主要原因是推導有功電流的過程中忽略了電流內環以及變流器的損耗,但是相對誤差控制在10%以內,且隨著過渡過程的結束,相對誤差呈現減小趨勢,所以認為近似合理。同時,三相短路電流的變化趨勢是先逐漸增大,到達最大值之后逐漸減小到穩態值。
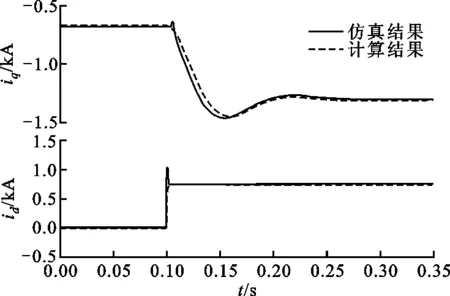
圖11 直驅風機有功、無功電流仿真和計算結果對比
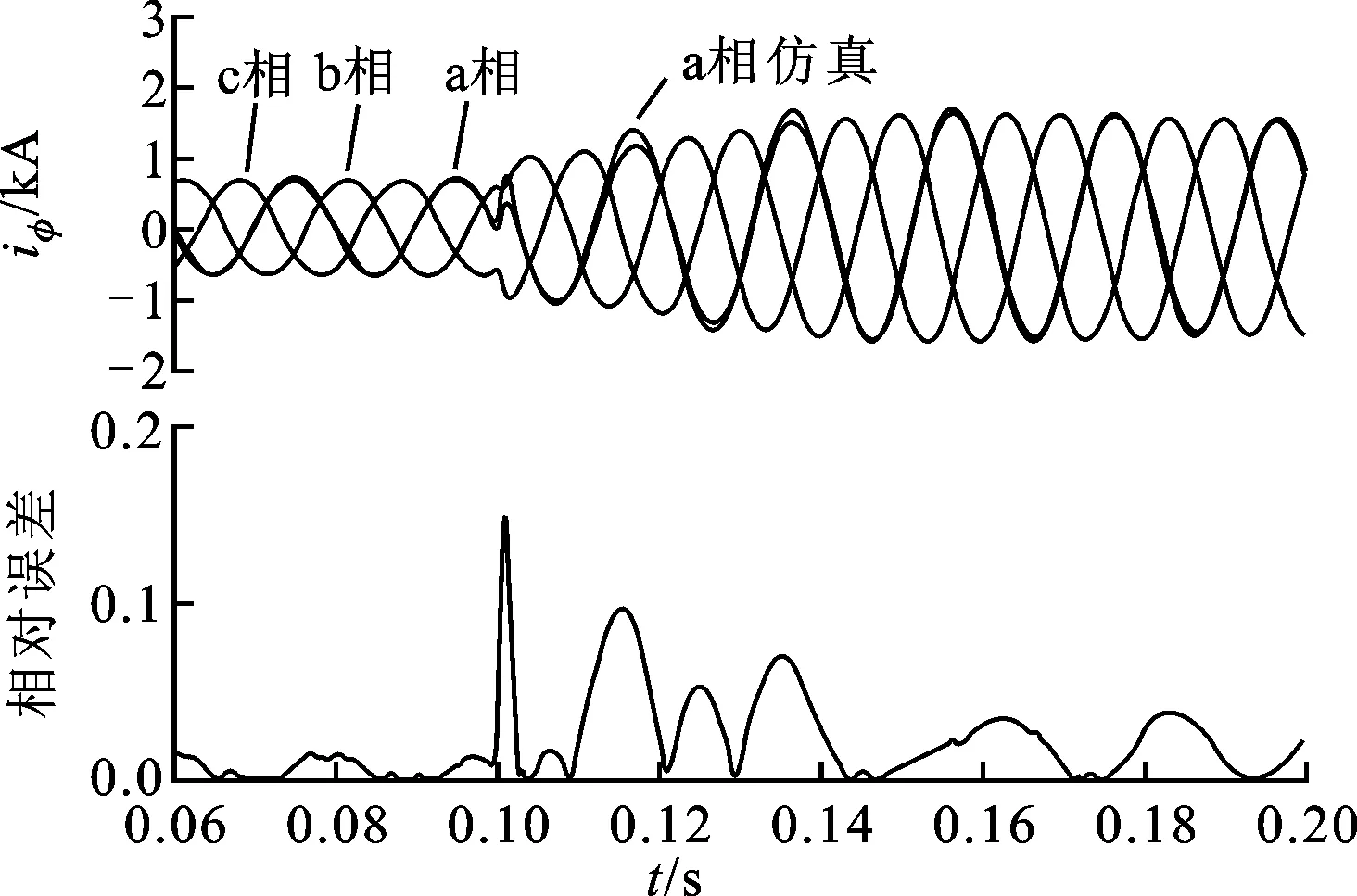
圖12 直驅風機三相電流及a相電流相對誤差
從圖13可以看出,有功電流的暫態過程被限制,如果不限制幅值,其為3.1 kA,加了限幅之后只有2 kA,且因為卸荷電路的開關動作特性,略有紋波。無功電流略有波動之后達到穩定,三相電流幅值達到變流器的最大輸出值。
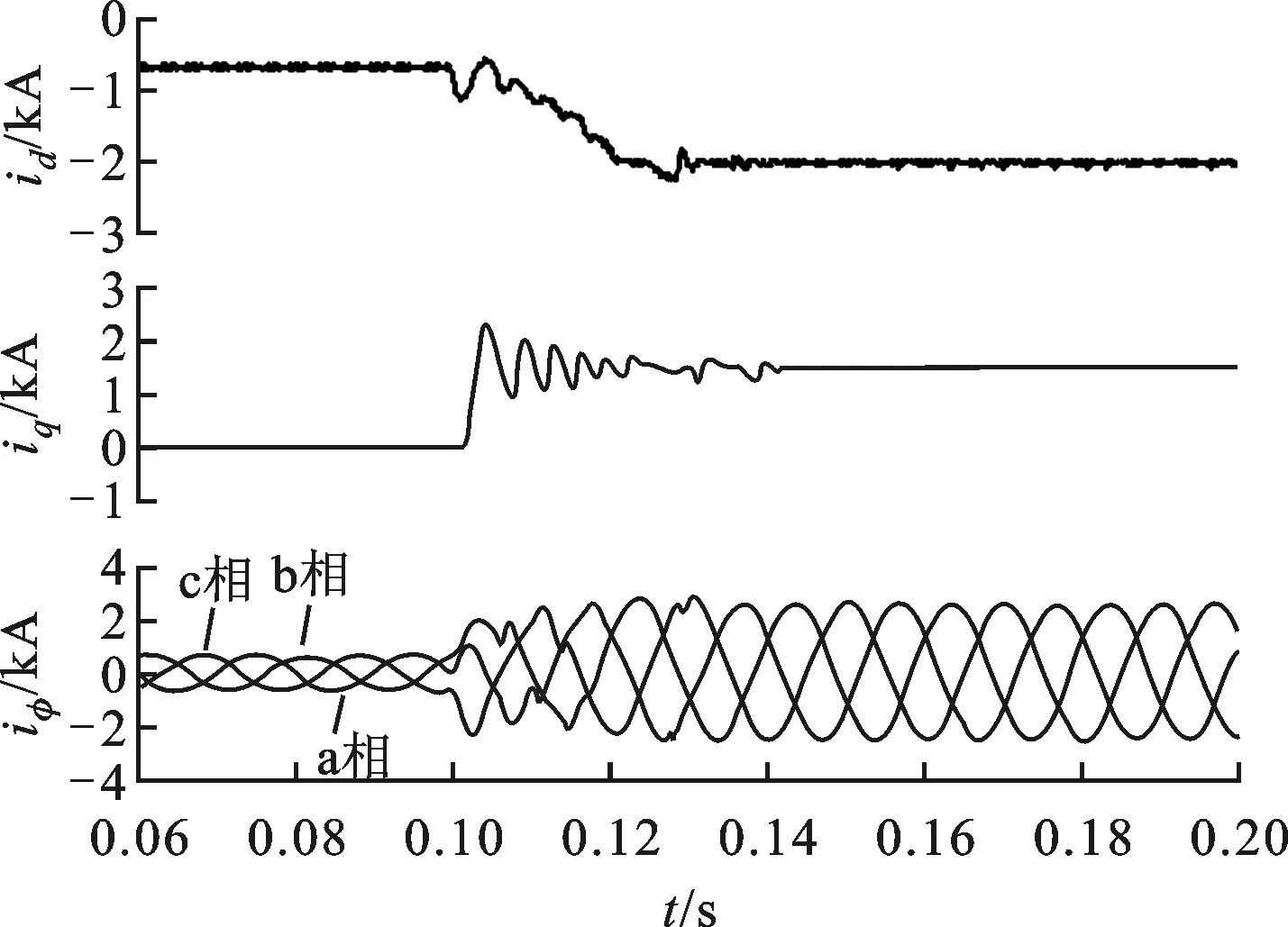
圖13 低電壓穿越時的有功、無功及三相電流波形
4.2 短路電流特性驗證
選取4.1節中的第一組控制參數,使機端電壓分別降到0.41 kV和0.35 kV,根據式(18),直驅風機暫態電流分量如圖14所示。

圖14 直驅風機暫態電流分量
從圖14中可以看出,隨著電壓跌落程度的加深,暫態分量最大值增大且到達最大值的時間略有增加,整個暫態過程延長。這就表明三相短路電流隨著電壓跌落程度的加深,其最大值增大且到達最大值的時間也增加,整個暫態過程延長。此特點與前文所述有功電流的特點相同,表明直驅風機的三相電流暫態特性主要取決于響應速度較慢的有功電流特性,同時也再次表明了忽略電流內環的合理性。
5 結 論
直驅風機網側變流器是一個控制作用下的電能平衡系統,在對其進行合理的簡化之后,得出三相短路電流的近似表達式。理論推導和仿真結果表明:
(1)直驅風機機端電壓跌落、卸荷電路不投入時有功電流可降為二階響應,無功電流滿足二階響應,有功電流的超調量和峰值時間隨著機端電壓的升高而減小,響應速度較慢,無功電流響應速度非常快;
(2)直驅風機短路電流的穩態值與其輸出功率以及電壓跌落程度有關,暫態分量的頻率、衰減時間常數與網側變流器控制參數有關;
(3)直驅風機三相短路電流呈現先逐漸增大到達最大值后逐漸減小到穩態值的趨勢,三相短路電流隨著電壓跌落程度的加深,其最大值增大且到達最大值的時間也增大,整個暫態過程延長。
[1] 李建林, 許洪華. 風力發電系統低電壓運行技術 [M]. 北京: 機械工業出版社, 2009: 16-29.
[2] 張麗英, 葉廷路, 辛耀中, 等. 大規模風電接入電網的相關問題及措施 [J]. 中國電機工程學報, 2010, 30(25): 1-9. ZHANG Liying, YE Tinglu, XIN Yaozhong, et al. Problems and measures of power grid accommodating large scale wind power [J]. Proceedings of the CSEE, 2010, 30(25): 1-9.
[3] 遲永寧, 劉燕華, 王偉勝, 等. 風電接入對電力系統的影響 [J]. 電網技術, 2007, 31(3): 77-81. CHI Yongning, LIU Yanhua, WANG Weisheng, et al. Study on impact of wind power integration on power system [J]. Power System Technology, 2007, 31(3): 77-81.
[4] 王晨清, 宋國兵, 劉凱, 等. 突變量保護對風電接入系統的適應性分析 [J]. 中國電機工程學報, 2014, 34(31): 5485-5492. WANG Chenqing, SONG Guobing, LIU Kai, et al. Adaptability analysis of fault component protection of power systems with wind farms [J]. Proceedings of the CSEE, 2014, 34(31): 5485-5492.
[5] 栗然, 高起山, 劉偉. 直驅永磁同步風電機組的三相短路故障特性 [J]. 電網技術, 2011, 35(10), 153-158. LI Ran, GAO Qishan, LIU Wei. Characteristics of direct-driven permanent magnet synchronous wind power generator under symmetrical three-phase short-circuit fault [J]. Power System Technology, 2011, 35(10): 153-158.
[6] 張保會, 王進, 李光輝, 等. 風力發電機集團式接入電力系統的故障特征分析 [J]. 電網技術, 2012, 36(7): 176-183. ZHANG Baohui, WANG Jin, LI Guanghui, et al. Analysis on fault features of wind turbine generators concentratedly connected to power grid [J]. Power System Technology, 2012, 36(7): 176-183.
[7] 胡書舉, 李建林, 許洪華. 永磁直驅風電系統低電壓運行特性的分析 [J]. 電力系統自動化, 2007, 31(17): 73-77. HU Shuju, LI Jianlin, XU Honghua. Analysis on the low voltage ride through capability of direct drive permanent magnetic generator wind turbines [J]. Automation of Electric Power Systems, 2007, 31(17): 73-77.
[8] 胡書舉, 李建林, 許洪華. 直驅風電系統變流器建模和跌落特性仿真 [J]. 高電壓技術, 2008, 34(5): 949-954. HU Shuju, LI Jianlin, XU Honghua. Modeling on converters of direct driven wind power system and its performance during voltage sags [J]. High Voltage Engineering, 2008, 34(5): 949-954.
[9] ABEDINI A, NASIRI A. PMSG wind turbine performance analysis during short circuit faults [C]∥Electrical Power Conference 2007. Piscataway, NJ, USA: IEEE, 2007: 160-165.
[10]楊平, 翁思義, 郭平. 自動控制原理 [M]. 北京: 清華大學出版社, 2006: 84-93.
[11]中華人民共和國國家質量監督檢驗檢疫總局, 中國國家標準化管理委員會. B/T 19963—2011風電場接入電力系統技術規定[S]. 北京: 中國標準出版社, 2011.
[12]張興, 張崇巍. PWM整流器及其控制 [M]. 北京: 機械工業出版社, 2003: 89-99.
[13]何仰贊, 溫增銀. 電力系統分析 [M]. 3版. 武漢: 華中科技大學出版社, 2002: 53-55.
(編輯 杜秀杰)
Three-Phase Fault Current Characteristics of Permanent Magnet Synchronous Generator
SONG Guobing1,CHANG Zhongxue1,WANG Chenqing1,LI Duanzhen1,DOU Minna1,LIU Kai2
(1. School of Electrical Engineering, Xi’an Jiaotong University, Xi’an 710049, China;2. ABB (China) Limited Corporate Research Center, Beijing 100015, China)
To analyze the permanent magnet synchronous generator (PMSG) fault characteristics, a simplified model of grid-side converter and external characteristics model of controller with chopper are proposed. Grid-side converter is an electric energy balance system under controlling action, its complex structure is ignored and the function and external characteristics are retained only. To reveal the PMSG short-circuit current is to analyze the three-phase current response under the action of turbine terminal voltage sag. A comparison with detailed model indicates that when chopper circuit does not operate, the value of PMSG current is determined by its output power and the degree of voltage sag; besides 50 Hz component, there are components whose frequencies are related to the control parameters; the fault current firstly increases gradually and then decreases to a steady value; with the increasing voltage sag degree, the maximum fault current gets greater and the corresponding period and transient decay time become longer; when chopper circuit operates, the fault current is just the maximum converter current.
relay protection; permanent magnet synchronous generator; chopper circuit; three-phase fault current
2015-04-15。
宋國兵(1972—),男,教授,博士生導師。
國家重點基礎研究發展計劃資助項目(2012CB215105)。
時間:2015-06-29
10.7652/xjtuxb201510001
TM77
A
0253-987X(2015)10-0001-07
網絡出版地址:http://www.cnki.net/kcms/detail/61.1069.T.20150629.1137.004.html