電梯無線群控通訊技術研究
2015-03-02 06:26:20徐美齡趙國軍
機電工程 2015年8期
關鍵詞:電梯
徐美齡,趙國軍
(浙江工業大學特種裝備制造與先進加工技術教育部重點實驗室,浙江杭州310014)
0 引 言
隨著城市建設的迅速發展,生活水平不斷提高,電梯作為一種主要的垂直交通工具,得到了廣泛的應用,同時人們對電梯服務質量和服務效率的要求也變得越來越高。為了提高服務質量及效率,建筑物往往需要安裝多臺電梯來進行群控調度。群控電梯的調度需通過分析各臺電梯的運行方向、轎廂當前位置、外召信號、內召信號等因素來實現的,傳統電梯獲取其余電梯群控信息的通訊方式往往采用CAN 總線、232 總線或者485 總線進行有線通訊[1],然而對于高層樓,電纜線重量高達100 kg,對電纜的安裝、固定及維修都加大了難度。該通訊方式線路多,抗干擾能力較差,控制復雜,影響了電梯群控通訊的可靠性。
針對上述問題,本研究基于STM32 W108 控制器為核心的ZigBee 無線群控模塊[2],設計一種電梯無線群控通訊系統。
1 電梯群控系統結構分析
目前,電梯群控系統結構有兩種:星型群控系統結構、環形群控系統結構[3]。
星型電梯群控系統如圖1 所示,即集中式控制,典型的有日本三菱和日立[4]的群控系統。星形群控系統通過一個群控模塊集中式控制,群控器不需要區分外召信號的所屬電梯,而只需知道外召所在樓層,但是系統存在一個致命缺點:當群控器發生故障時,整個群控系統將會癱瘓。由此看出,群控系統的可靠性較低。
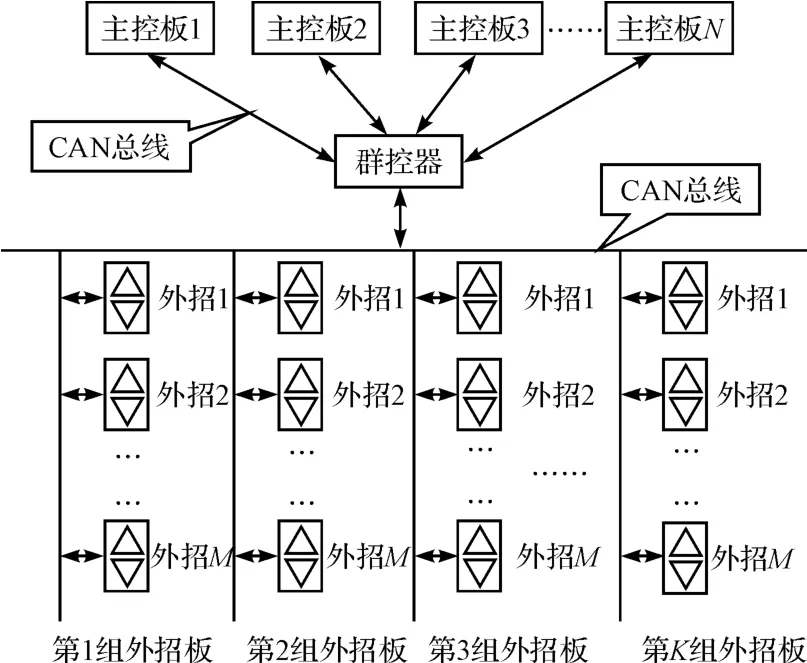
圖1 星型群控系統結構
環形群控系統結構如圖2 所示,典型的有奧的斯群控系統和德國奔克群控系統[5]。環型群控系統改變了集中控制模式,每臺電梯可以獨立運行,大大地減小了群控系統整體癱瘓的概率。但是傳輸數據量大,通訊易堵塞,信息傳遞實時性差,數據易丟失。
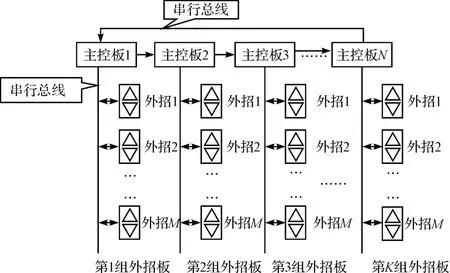
圖2 環形群控系統結構
本研究設計了一種電梯無線群控通訊系統,其結構如圖3 所示。
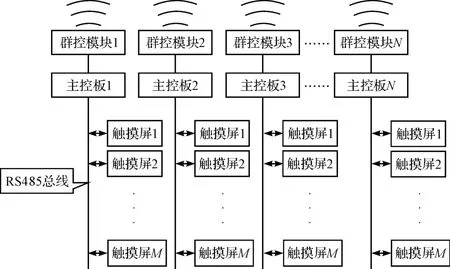
圖3 無線群控系統結構
由圖3 可知,每臺電梯配有一個主控板,每個主控板配有一個群控模塊,群控模塊不僅是所有功能模塊的連接中心,而且是所有功能模塊的控制核心。
該無線群控系統結構采用多個群控模塊,使群控系統不會因為某一個群控器的破壞而造成整體癱瘓,而且群控模塊與主板分離,自成一個功能模塊。本研究采用以STM32 W108 芯片為核心的ZigBee 作為群控模塊進行無線群控通訊,利用電梯無線群控系統結構,克服了星形和環形系統所存在的缺點,保證了群控系統的高效穩定性,提高了電梯群控系統的執行效率。
2 電梯無線群控通訊系統的設計
本研究的群控模塊采用REX3SP 型ZigBee 無線模塊,主控核心為ARM Cortex-M3 內核的STM32W108芯片,該模塊的功能是負責把主控板的串口數據轉化成無線信號發送出去或者接收無線信號并轉發給主控板。群控模塊接收靈敏度為-104 dBm,天線增益為2 dBi,發射的最大功率為+23 dBm,最大通信速率可達為250 kps[6]。本研究采用8 臺電梯作為群控群,電梯的編號從左到右分別為0x01,0x02,0x03,0x04,0x05,0x06,0x07,0x08。
2.1 主控板間的串口配置
在主控板間通訊中,通訊模式采用異步、半雙工串口模式。串口數據發送時,每個數據由10 個位組成,即1 個起始位,8 個數據位,1 個停止位。在數據穩定傳輸的基礎上,主控板的串口波特率采用115 200 bps。
接收或發送一個字節所需時間[7]如下式:

主控板發送一個數據字節的時間為T,將其代入式(1)中可知T=86 μs。
2.2 群控模塊間通訊的具體實現
無線群控通訊系統采用透明傳輸的方式[8]進行通訊,即電梯主控板n 端的無線模塊n 將串口處接收到的數據打包,并啟動無線發送功能。其他無線模塊把來自無線模塊n 的無線數據包進行解包得到電梯n的群控數據幀,并將其通過串口發送至各自連接的電梯主控板。無線群控通訊的具體實現如圖4 所示。

圖4 無線群控通訊的具體實現
2.3 群控模塊間通訊時序同步技術的介紹
群控通訊時,各個群控模塊的通訊時序如圖5所示。
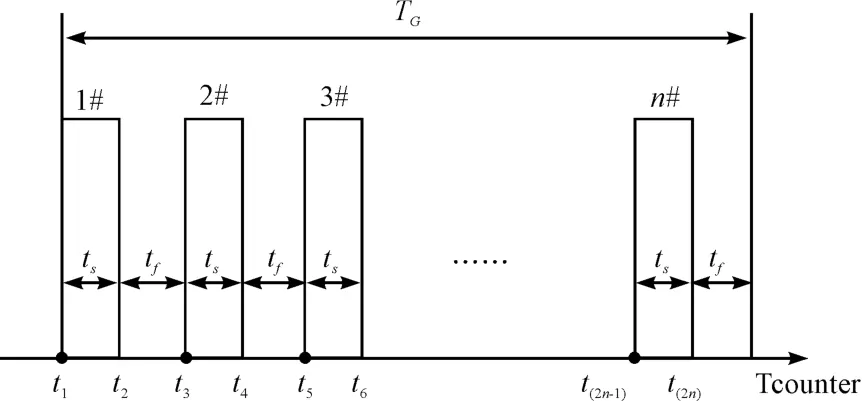
圖5 群控模塊間的通訊時序
如圖5 所示,橫坐標為時間計數軸,因此:

式(2,3)中:n≥1 時間段tf是為了保證:每個群控模塊發送數據幀結束后,其余群控模塊都能在tf時間內完成接收。
每個群控模塊控制芯片的時鐘存在一定的差別,群控通訊階段的通訊時序同步原理如圖6 所示,由于1 號群控模塊發送完3 個字節數據時,計數器計數值為t1,2 號群控模塊卻只計數到t'1,與1 號群控模塊計數值相差為t1-t'1,因此需要在時間上進行同步。根據發送或接收一個字節的時間是固定的,即群控模塊發送或者接收相同字節數據幀所花時間相同,本研究在此設定n 號群控模塊發送完3 個字節數據的時間點t1+(ts+tf)·(n-1)為所有群控模塊的同步值,即其他群控模塊在接收到第3 個字節時在軟件上重新校正計數值為t1+(ts+tf)·(n-1)。這樣不僅能夠防止總線信息的堵塞,還能保證群控信息的高效傳輸。

圖6 群控通訊階段的通訊時序同步原理
2.4 群控模塊間通訊過程的分析
電梯無線模塊是按照1、2、3…8 的固定順序依次輪流發送數據幀,這樣才能有序地獲得每臺主板的群控信息。本研究在群控模塊上電開始通訊前的時間上設定了同步規則:啟動時同步、正常工作時同步。
啟動時同步:電梯啟動時的同步過程如圖7 所示。由圖7 可知,當1 號電梯上電時,在0.5 s 內查詢是否接收到其他群控模塊發送的數據,如果有收到,則說明電梯處于群控狀態中,因此當群控模塊接收完成數據后需跟其它群控模塊進行通訊時序的同步;如果沒有,則說明電梯處于非群控狀態中,屬單梯控制。其余電梯與1 號梯的啟動同步原理相同。此處的時間設定可以根據編寫的調度程序的特點來選擇,一般的原則為:從0x010x08 號電梯,等待時間依次增加。
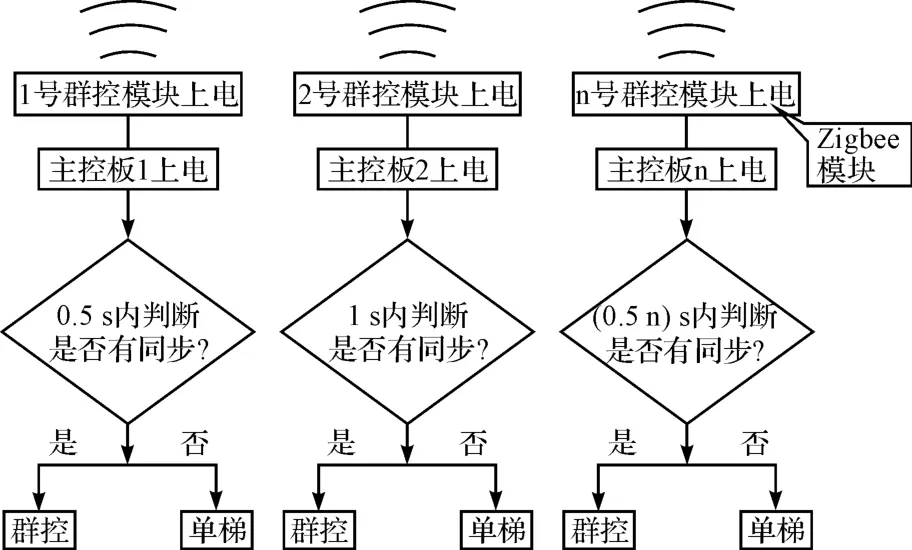
圖7 啟動時同步過程
正常工作時同步:為了保證無線通訊的暢通,需對群控模塊進行通訊時序上的同步,同步次數取決于處于群控狀態中的電梯臺數,有幾臺就進行幾次同步。在本研究中,設定一群控數據幀字節長度為74 個,其中包括64 層的呼梯信息、開關門信息、故障信息、滿載信息、電梯運行狀態信息[9]等,數據幀首字節為0x7E,第3 個字節表示電梯編號識別碼。群控通訊主程序流程圖如圖8 所示。
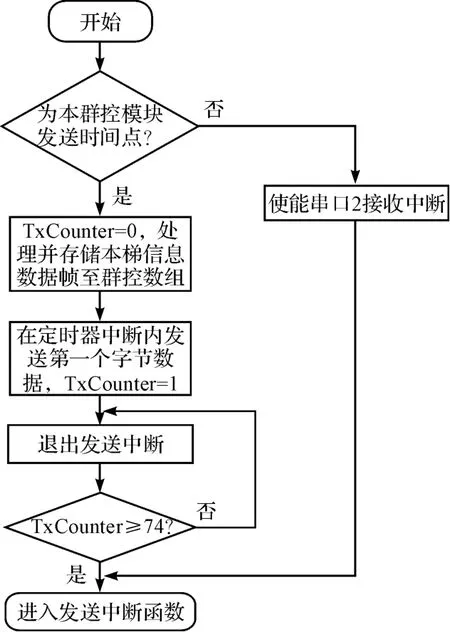
圖8 無線群控通訊主程序
由圖8 可知,系統先判斷是不是本梯的群控模塊發送時間點,若是,首先準備好即將發送的本梯信息數據幀并把數據存儲至群控數組內,其次在定時器中斷內通過串口發送首字節,其他字節數據會存放在串口發送緩沖器內,然后其余字節數據會依次發送,直到串口發送緩沖器為空時才停止發送,即發送完畢;若不是,則使能串口接收中斷,準備接收其他群控模塊發送過來的數據,具體過程如圖9 所示。
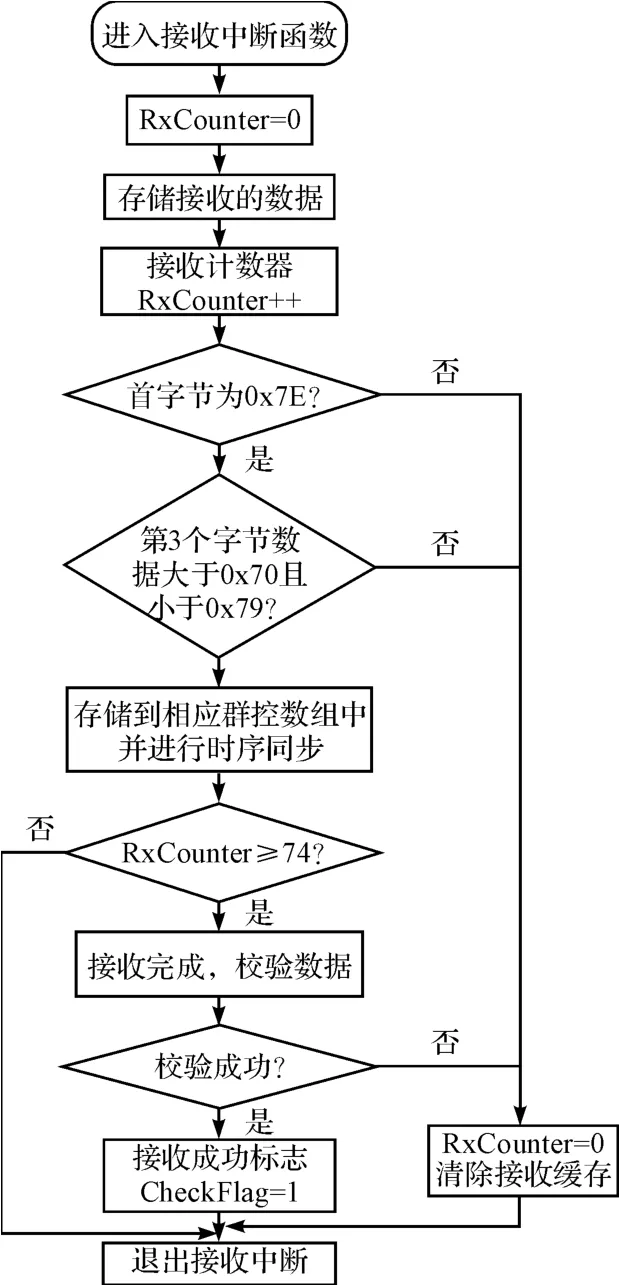
圖9 串口接收流程
由圖9 可知,在進入串口接收中斷時,系統存儲接收到的數據,再判斷首字節是否為0x7E?若是,則繼續判斷第3 個字節是否是電梯編號信息,若是,把接收到的數據存儲在群控數組內并進行時序同步,等到接收完畢后判斷是否校驗成功,若是,退出接收中斷。
每塊群控模塊發送的數據幀長度為74 個字節,發送一幀的時間為TG1=74T =6.4 ms。經過多次測試,ZigBee 存在最大16 ms 的延時,為了保證通訊正常,因此本研究采用25 ms 同步一次。群控模塊間的通訊時序如圖10 所示,TG=200 ms。
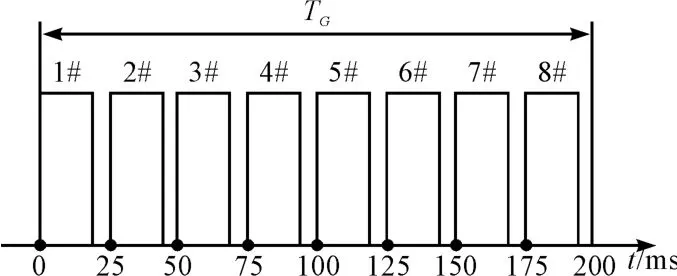
圖10 群控模塊間的通訊時序
3 實驗測試
本研究中的主控板采用Cortex-M3 內核處理器LPC1766,該處理器是NXP 的32 位嵌入式處理器。
觸摸屏外招板采用型號為DMT80480T070_18 WT的DWIN 公司生產的DGUS 屏[10]。為了驗證群控通訊的合理性,本研究搭建了實驗平臺,兩臺電梯主控板連接實物圖如圖11 所示。
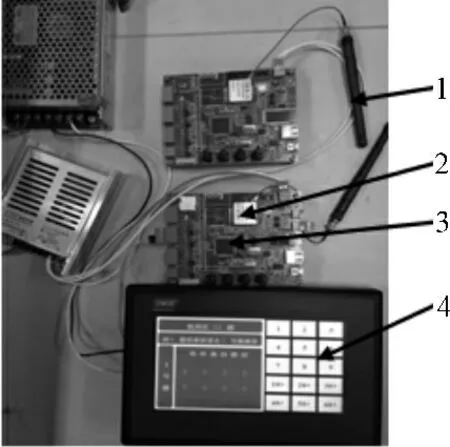
圖11 兩臺電梯連接實物圖
在本研究中,由于設備的限制,筆者進行了1 號梯和8 號梯的群控通訊實驗。1 號群控模塊與8 號群控模塊之間的通信波形如圖12 所示。
由圖12 可知,群控模塊間的通訊周期為200 ms,無線群控通訊在時間上滿足電梯群控系統通訊的要求。
4 結束語
本研究闡述了以STM32W108 芯片為核心的Zig-Bee 無線模塊作為群控模塊,針對傳統電梯群控通訊存在通訊線路過多,穩定性較差,電纜多引起的高成本、高故障率的問題,提出了一種新的群控技術,提高了電梯的運行性能和服務質量。經實驗表明,本群控系統結構設計更加合理,大大提高了系統穩定性;該系統采用無線群控通訊方式,打破傳統的有線群控通訊,降低了成本,提高電梯的使用壽命和可靠性。

圖12 1 號群控模塊與8 號群控模塊間的通信波形
[1]高如月,吳躍軍,李建勛.基于CAN 總線及高速RS232 總線的電梯群優化控制系統的設計[J].電氣傳動自動化.2005,27(6):45-48.
[2]沈建華,赫立平.STM32W 無線射頻ZigBee 單片機原理與應用[M].北京:北京航空航天大學出版社,2010.
[3]上海永大電梯設備有限公司. 一種群控裝置:中國,ZL200720071806.5[P].2008-04-30.
[4]俞 雯.基于多目標規劃算法的智能電梯群控系統的研究[D].杭州:浙江工業大學機械學院,2008.
[5]魏君燕,趙國軍,曾信雁,等. 群控電梯目的地調度系統[J].機電工程.2013,30(11):1383-1387.
[6]浙江瑞瀛網絡科技有限公司. REXBEE 模塊產品手冊[OL].浙江遭瑞瀛網絡科技有限公司,2013.
[7]田炳麗,丁風雷,王冠琳,等.硬件擴展單片機多串口通訊方式的研究[J].通信技術.2010,43(10):153-154.
[8]翟 雷,劉盛德,胡咸斌. ZigBee 技術及應用[M]. 北京:北京航空航天大學出版社,2010.
[9]周海丹,趙國軍,徐 雷.基于模糊邏輯的預約電梯群控算法[J].機電工程,2010,27(9):37-41.
[10]迪文科技有限公司迪文DGUS 屏使用指南[Z].迪文科技有限公司,2012.
猜你喜歡
課堂內外(小學版)(2024年5期)2024-05-29 00:00:00
中國品牌(2019年10期)2019-10-15 05:57:12
故事大王(2018年3期)2018-05-03 09:55:52
小學生學習指導(低年級)(2018年3期)2018-01-31 02:18:58
知識就是力量(2017年9期)2017-10-13 23:35:31
小學生時代·綜合版(2016年7期)2016-05-14 17:53:49
紅蜻蜓·低年級(2015年11期)2015-04-29 00:00:00
小說月刊(2015年11期)2015-04-23 08:47:36
小說月刊(2015年4期)2015-04-18 13:55:18
發明與創新(2015年33期)2015-02-27 10:40:04