PI自整定永磁伺服系統(tǒng)轉(zhuǎn)動(dòng)慣量的辨識(shí)研究*
2015-03-02 06:26:16馬立新徐鎮(zhèn)乾范洪成黃陽(yáng)龍
機(jī)電工程 2015年8期
關(guān)鍵詞:方法
馬立新,徐鎮(zhèn)乾,范洪成,黃陽(yáng)龍
(上海理工大學(xué)光電信息與計(jì)算機(jī)工程學(xué)院,上海200093)
0 引 言
永磁同步電機(jī)在伺服系統(tǒng)的應(yīng)用中,變化的電機(jī)轉(zhuǎn)動(dòng)慣量會(huì)對(duì)系統(tǒng)的性能造成較大的影響,特別是高精密數(shù)控機(jī)床、高性能機(jī)器人等對(duì)動(dòng)、靜態(tài)性能要求苛刻的場(chǎng)合[1]。如果轉(zhuǎn)動(dòng)慣量變大可能使系統(tǒng)不穩(wěn)定,響應(yīng)慢。如果轉(zhuǎn)動(dòng)慣量變小,雖系統(tǒng)響應(yīng)變快,但會(huì)加大超調(diào)或震蕩,甚至?xí)斐傻退贂r(shí)的轉(zhuǎn)矩脈動(dòng)[2]。
目前的研究大多是通過(guò)算法根據(jù)速度設(shè)定值與反饋值單純對(duì)PI 參數(shù)進(jìn)行優(yōu)化,而忽略了它是一個(gè)多變量、內(nèi)部強(qiáng)耦合的高階非線性系統(tǒng)[3],運(yùn)行過(guò)程中很多參數(shù)會(huì)發(fā)生變化,PI 控制器的控制與電機(jī)參數(shù)密切相關(guān),因此電機(jī)參數(shù)辨識(shí)才是電機(jī)PI 控制系統(tǒng)研究的關(guān)鍵[4]。
本研究針對(duì)永磁同步電機(jī)伺服系統(tǒng)中轉(zhuǎn)動(dòng)慣量變化問(wèn)題,設(shè)計(jì)一種帶PI 參數(shù)自整定的永磁同步電機(jī)轉(zhuǎn)動(dòng)慣量辨識(shí)系統(tǒng)并對(duì)其進(jìn)行分析和研究。
1 永磁同步電機(jī)的矢量控制
1.1 坐標(biāo)變換
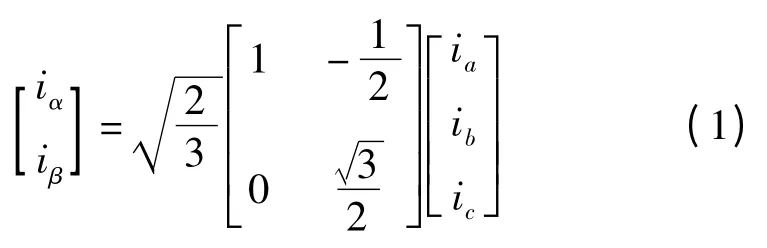
利用坐標(biāo)變換,可實(shí)現(xiàn)電機(jī)定子電流從靜止坐標(biāo)系到旋轉(zhuǎn)坐標(biāo)系之間的變換,簡(jiǎn)化了方程及空間矢量的計(jì)算求解,坐標(biāo)變換如式(1)所示[7]。
Clarke 變換:即三相A、B、C 坐標(biāo)系)到兩相α、β坐標(biāo)系之間的3/2 變換為:
Park 變換:即兩相α、β 坐標(biāo)系到兩相d、q 坐標(biāo)系之間的αβ/dq 變換為:

式中:θr—d 軸與A 軸之間的夾角[8]。
1.2 永磁同步電機(jī)數(shù)學(xué)模型
d、q 坐標(biāo)系下永磁同步電機(jī)電壓方程為:

式中:id,iq—直、交軸電流分量;ψd,ψq—直、交軸磁鏈;P—微分算子;ωr—轉(zhuǎn)子角速度[9]。
d、q 坐標(biāo)系下永磁同步電機(jī)電磁轉(zhuǎn)矩方程為:

式中:Np—極對(duì)數(shù),ψf—永磁體產(chǎn)生磁鏈[10]。
1.3 永磁同步電機(jī)PI 控制方法
永磁同步電機(jī)常采用的PI 控制方法關(guān)鍵就是要找到合適的Kp和Ki,由于伺服系統(tǒng)中參量的變化使PI 參數(shù)具有時(shí)變性,傳統(tǒng)的PI 控制方法難以滿足要求。采用基于PI 自整定的轉(zhuǎn)動(dòng)慣量辨識(shí)方法,對(duì)速度環(huán)PI 參數(shù)進(jìn)行在線補(bǔ)償[11],其控制結(jié)構(gòu)如圖1 所示。
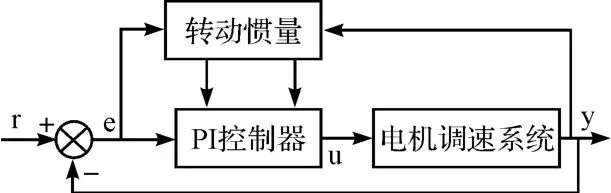
圖1 轉(zhuǎn)動(dòng)慣量辨識(shí)值優(yōu)化的PI 控制方式
2 轉(zhuǎn)動(dòng)慣量辨識(shí)方法的PI 自整定
轉(zhuǎn)動(dòng)慣量辨識(shí)方法有很多,如直接計(jì)算法、加減速法、MRAI 等。直接計(jì)算法通過(guò)復(fù)雜公式計(jì)算,要占用較多的計(jì)算機(jī)內(nèi)存且精確度低。加減速法是一種離線式辨識(shí)方法,需要大范圍加減速,使用場(chǎng)合要求苛刻。MRAI(模型參考自適應(yīng)參數(shù)辨識(shí))雖然是在線辨識(shí)方法,但是其程序的編寫和調(diào)試非常困難[12]。
2.1 新型轉(zhuǎn)動(dòng)慣量辨識(shí)算法
在id=0 的控制方式下,由永磁同步電機(jī)d、q 坐標(biāo)下的電磁轉(zhuǎn)矩方程(4)得:

由式(5)可知電磁轉(zhuǎn)矩T 和轉(zhuǎn)矩電流iq成正比例關(guān)系,忽略系統(tǒng)摩擦,有機(jī)械運(yùn)動(dòng)方程得:

式中:ωr—轉(zhuǎn)子轉(zhuǎn)速,Tl—負(fù)載轉(zhuǎn)矩,J—轉(zhuǎn)動(dòng)慣量,P—微分算子。
為防止啟動(dòng)或調(diào)速過(guò)中,電流過(guò)大而燒壞電機(jī)定子,一般速度PI 調(diào)節(jié)的輸出會(huì)有一個(gè)限幅,即電流給定的最大值。當(dāng)電機(jī)以最大電流作勻速運(yùn)動(dòng)時(shí)有:

令iq(max)=2in,則Te=2Tn。由式(6)得電機(jī)的加速度:
選取勻加速過(guò)程中的兩個(gè)時(shí)間點(diǎn)t1、t2,在兩個(gè)時(shí)刻分別記下電機(jī)轉(zhuǎn)子轉(zhuǎn)速ω1、ω2,有:

再令:iq(max)=in,則有:Te=Tn。本研究采用相同方法選取兩個(gè)時(shí)間點(diǎn)t3、t4,使t4-t3=t2-t1,然后分別記錄下此時(shí)電機(jī)轉(zhuǎn)子的轉(zhuǎn)速ω3、ω4,則有:

在兩次加速過(guò)程中保持負(fù)載轉(zhuǎn)矩Tl 不變,則有:

由式(11)得到了轉(zhuǎn)動(dòng)慣量的計(jì)算方法。
2.2 PI 參數(shù)自整定
伺服控制系統(tǒng)一般由外環(huán)速度環(huán)和內(nèi)環(huán)電流環(huán)進(jìn)行永磁同步電機(jī)的雙閉環(huán)控制。電流環(huán)簡(jiǎn)化后,將其視作速度環(huán)中的一個(gè)環(huán)節(jié),電流環(huán)為帶有零點(diǎn)的二階系統(tǒng),傳遞函數(shù)如下:

式中:Tif—電流反饋通道濾波時(shí)間;Tsf=Tif+Ts;Ts—開(kāi)關(guān)周期,都為時(shí)間常數(shù);KP,τ—調(diào)整器參數(shù);K =1/2Tsf。
速度環(huán)的截止頻率一般比較低,忽略后的電流環(huán)傳遞函數(shù)可以近似降階為:

式中:Km—簡(jiǎn)化后電流環(huán)單位比例增益。
式(13)為電流環(huán)調(diào)節(jié)器,速度環(huán)PI 控制的結(jié)構(gòu)如圖2 所示。
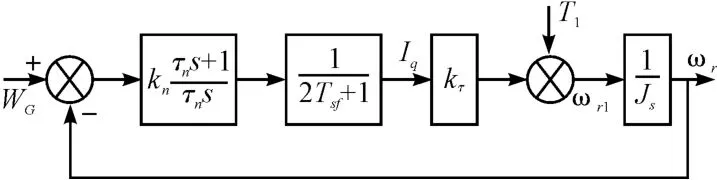
圖2 速度環(huán)PI 控制結(jié)構(gòu)圖
本研究將速度環(huán)校正成典型Ⅱ型系統(tǒng),速度環(huán)控制器采用PI 控制。伺服系統(tǒng)的開(kāi)環(huán)傳遞函數(shù)為:

式中:kn,τn—調(diào)節(jié)器參數(shù);Kt—轉(zhuǎn)矩常數(shù);J—電機(jī)轉(zhuǎn)動(dòng)慣量。
根據(jù)典型Ⅱ型系統(tǒng)設(shè)計(jì)參數(shù)公式:
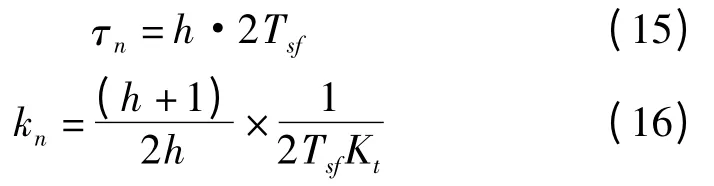
式中:h—中頻帶寬,對(duì)于典型的二次型系統(tǒng),h 值越小則系統(tǒng)的抗擾性就越好。
先來(lái)幻想一下:2030年的某天,你起床,在家中戴上一套VR裝備,和大洋洲的客戶開(kāi)會(huì)。兩小時(shí)后會(huì)議結(jié)束,你搭乘無(wú)人駕駛車輛,到隔壁城市和朋友午餐。午餐你點(diǎn)了一份用牛的干細(xì)胞培育出的人工牛排。晚間運(yùn)動(dòng),你選擇了以海島為背景,慢跑在沙灘和夕陽(yáng)的虛擬現(xiàn)實(shí)中。
當(dāng)h <5 時(shí)系統(tǒng)的振蕩次數(shù)將會(huì)增加。綜合考慮系統(tǒng)的跟隨性和抗擾性能的各項(xiàng)指標(biāo),根據(jù)經(jīng)驗(yàn)取h =5。則有:
式中:h,Kt—常數(shù),Kt可以由電機(jī)參數(shù)計(jì)算出;Tsf—時(shí)間常數(shù),可以由電流環(huán)參數(shù)計(jì)算出。
根據(jù)式(11)計(jì)算出的轉(zhuǎn)動(dòng)慣量J,代入到式(17,18)中,得出PI 參數(shù)Kp和Ki補(bǔ)償值,系統(tǒng)就會(huì)依據(jù)計(jì)算出的PI 參數(shù)對(duì)系統(tǒng)做出相應(yīng)調(diào)整。
3 仿真實(shí)驗(yàn)結(jié)果研究
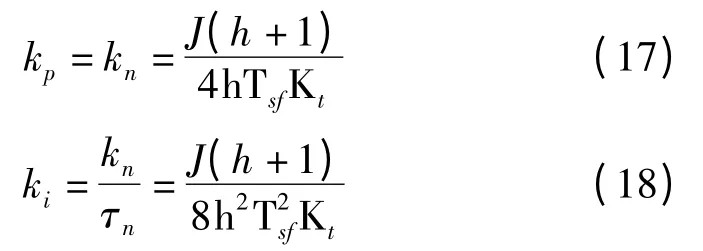
為了檢驗(yàn)采用轉(zhuǎn)動(dòng)慣量辨識(shí)算法優(yōu)化的PI 控制器性能,本研究以永磁同步電機(jī)為控制對(duì)象。電機(jī)初始參數(shù)如表1 所示。
表1 永磁同步電機(jī)參數(shù)
3.1 PI 參數(shù)自整定實(shí)現(xiàn)
本研究利用Matlab R2013b 平臺(tái)進(jìn)行試驗(yàn),在Matlab 環(huán)境下建立的PI 參數(shù)優(yōu)化仿真模型如圖3所示。
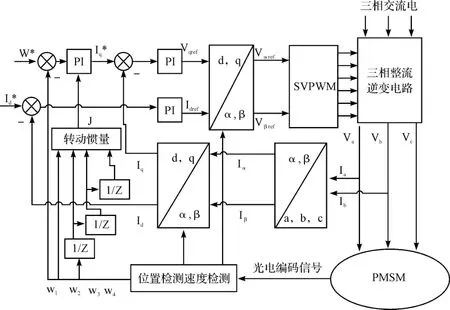
圖3 轉(zhuǎn)動(dòng)慣量辨識(shí)PI 補(bǔ)償仿真框圖
由圖3 可見(jiàn),在電機(jī)勻加速階段,本研究分別采集4 個(gè)時(shí)間點(diǎn)t1、t2、t3、t4的速度值ω1、ω2、ω3、ω4。其中:t2-t1=t4-t3,框圖中ω1為采集到的第一個(gè)速度值,ω2、ω3、ω4依次為延遲后采集到的速度值,然后將數(shù)值輸入到轉(zhuǎn)動(dòng)慣量辨識(shí)模塊,計(jì)算出的轉(zhuǎn)動(dòng)慣量值J 傳輸?shù)剿俣拳h(huán)PI 自整定模塊對(duì)PI 參數(shù)進(jìn)行補(bǔ)償。
3.2 仿真實(shí)驗(yàn)結(jié)果評(píng)估
本研究在Matlab 中搭建帶有轉(zhuǎn)動(dòng)慣量辨識(shí)方法的永磁同步電機(jī)伺服控制系統(tǒng)模型,進(jìn)行如下試驗(yàn):啟動(dòng)時(shí),初始負(fù)載轉(zhuǎn)矩為0.2 N·m,轉(zhuǎn)速為1 000 r/min;在0.15 s時(shí),將負(fù)載加至2 N·m。本研究方法和傳統(tǒng)方法速度波形如圖4 所示。本研究方法和傳統(tǒng)方法轉(zhuǎn)矩波形如圖5 所示。本研究方法逆變輸出的A、B、C三相電流波形如圖6 所示。
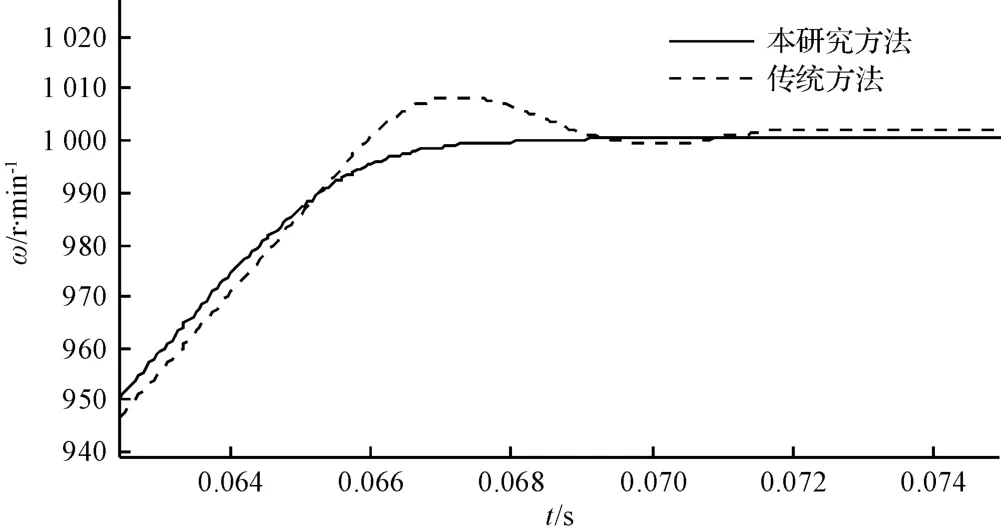
圖4 轉(zhuǎn)速波形曲線
由圖中波形曲線可以看出,利用傳統(tǒng)方法的系統(tǒng)速度和轉(zhuǎn)矩超調(diào)較大,轉(zhuǎn)速超調(diào)會(huì)使電機(jī)在啟動(dòng)階段發(fā)生抖動(dòng),轉(zhuǎn)矩的脈動(dòng)會(huì)促使啟動(dòng)電流的增大,過(guò)大電流的沖擊會(huì)對(duì)系統(tǒng)造成損害。而利用本研究方法的系統(tǒng)轉(zhuǎn)速和轉(zhuǎn)矩波形都要比傳統(tǒng)方法波形曲線要平緩,而且從啟動(dòng)到速度穩(wěn)定階段速度無(wú)超調(diào)、響應(yīng)快,實(shí)現(xiàn)永磁同步電機(jī)的平滑啟動(dòng),說(shuō)明該方法的系統(tǒng)穩(wěn)定速度快,具有更好的動(dòng)態(tài)性能;在速度穩(wěn)定階段實(shí)際速度非常接近設(shè)定值,提高了速度的精確度,速度誤差率減少了0.16%左右,說(shuō)明系統(tǒng)具有良好的靜態(tài)性能。系統(tǒng)在負(fù)載變化時(shí)電機(jī)三相電流無(wú)尖峰,且為標(biāo)準(zhǔn)正弦波形,為坐標(biāo)變換提供方便。采用本研究方法的系統(tǒng)具有良好的動(dòng)、靜態(tài)性能,不但可以提高系統(tǒng)響應(yīng)速度,而且可以提高系統(tǒng)控制精度。
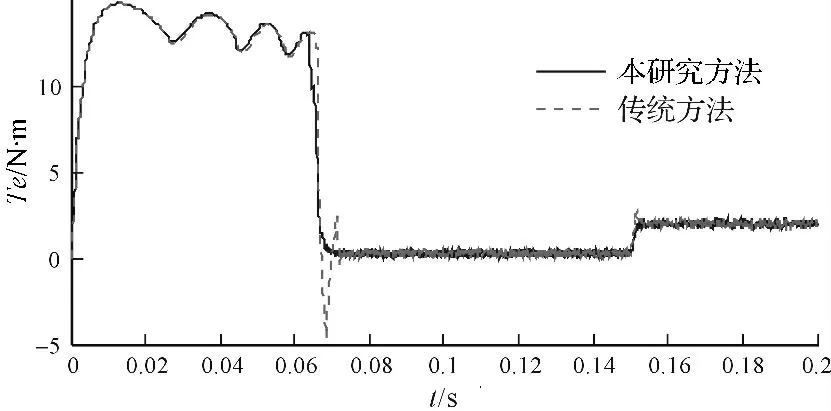
圖5 轉(zhuǎn)矩波形曲線
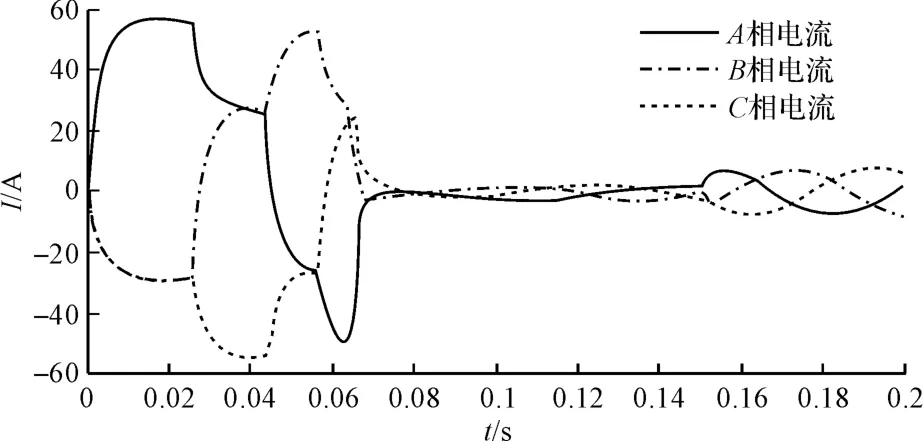
圖6 本研究方法三相逆變輸出電流波形曲線
4 結(jié)束語(yǔ)
筆者研究了帶PI 參數(shù)自整定的永磁同步電機(jī)伺服系統(tǒng)轉(zhuǎn)動(dòng)慣量辨識(shí)問(wèn)題,轉(zhuǎn)動(dòng)慣量在線辨識(shí)方法有利于提高永磁伺服控制系統(tǒng)的抗擾能力,使系統(tǒng)性能不受轉(zhuǎn)動(dòng)慣量變化的影響;提出了一種新型轉(zhuǎn)動(dòng)慣量辨識(shí)的PI 參數(shù)自整定優(yōu)化算法,并與傳統(tǒng)PI 控制方法在相同環(huán)境下進(jìn)行仿真實(shí)驗(yàn)。
通過(guò)實(shí)驗(yàn)波形對(duì)比分析可知,相對(duì)傳統(tǒng)方法來(lái)說(shuō)該方法收斂快、無(wú)超調(diào),且速度精確度相比傳統(tǒng)方法高出0.16%左右;實(shí)現(xiàn)了轉(zhuǎn)矩啟動(dòng)無(wú)尖峰,進(jìn)而減小啟動(dòng)尖峰電流對(duì)控制系統(tǒng)的沖擊,提高了系統(tǒng)可靠性,更具優(yōu)越性。
下階段,本研究會(huì)將該方法應(yīng)用到高精密數(shù)控機(jī)床和高性能機(jī)器人等實(shí)際伺服系統(tǒng)中進(jìn)一步完善,以提高系統(tǒng)的運(yùn)行效率和控制精度,改善控制性能。
[1]LIU Hui-xian,LI Shi-hua. Speed control for PMSM servo system using predictive functional control and extended state observer[J]. Industrial Electronics,IEEE Transactions on,2012,59(2):1171-1183.
[2]陳伯時(shí). 電力拖動(dòng)自動(dòng)控制系統(tǒng)運(yùn)動(dòng)控制系統(tǒng)[M]. 北京:機(jī)械工業(yè)出版社,2010.
[3]羅 慧,尹 泉,孫明明.交流伺服系統(tǒng)參數(shù)辨識(shí)方法綜述[J].伺服控制,2012,35(1):27-29.
[4]郭宇婕,黃立培,邱 陽(yáng).交流伺服系統(tǒng)的轉(zhuǎn)動(dòng)慣量辨識(shí)及調(diào)節(jié)器參數(shù)自整定[J]. 清華大學(xué)學(xué)報(bào):自然科學(xué)版,2002,42(9).1180-1183.
[5]周 虎. 永磁同步電機(jī)參數(shù)在線辨識(shí)算法研究[D]. 成都:電子科技大學(xué)自動(dòng)化工程學(xué)院,2012.
[6]WU Yang-yang. Global Dynamic Sliding Mode Control of PMSM Speed Servo Systems Base on Extended State Observer[C]. Control Conference(CCC),2013 32 and Chinese.2013:4432-44.
[7]徐 東,王田苗,魏洪興.一種基于簡(jiǎn)化模型的永磁同步電機(jī)轉(zhuǎn)動(dòng)慣量辨識(shí)和誤差補(bǔ)償[J].電工技術(shù)學(xué)報(bào),2013,28(2):126-131.
[8]劉 竹.帶PI 參數(shù)自整定的永磁同步電機(jī)伺服系統(tǒng)的設(shè)計(jì)與實(shí)現(xiàn)[D]. 長(zhǎng)沙:湖南大學(xué)電氣與信息工程學(xué)院,2013.
[9]丁文雙.永磁同步電機(jī)PI 參數(shù)自整定[D].南京:南京航空航天大學(xué)自動(dòng)化學(xué)院,2012.
[10]韓亞榮,邱 鑫,朱德明.交流伺服系統(tǒng)轉(zhuǎn)動(dòng)慣量辨識(shí)方法[J].電工電能新技術(shù),2013,32(3):36-40.
[11]何 杰,王家軍.基于SVPWM 的永磁同步電動(dòng)機(jī)系統(tǒng)建模與仿真[J].機(jī)電工程,2009,26(7):77-82.
[12]SENJYU T,KINJO K,URASSKI N,et al. Parameter measurement for PMSM using adaptive identification[J].IEEE Trans. On Power Electronics,2011,45(12):1344-1354.
猜你喜歡
中老年保健(2021年9期)2021-08-24 03:52:04
河北畫報(bào)(2021年2期)2021-05-25 02:07:46
中學(xué)生數(shù)理化(高中版.高考理化)(2020年2期)2020-04-21 05:33:04
兒童繪本(2020年5期)2020-04-07 17:46:30
兒童故事畫報(bào)(2019年5期)2019-05-26 14:26:14
Coco薇(2016年2期)2016-03-22 02:42:52
山東青年(2016年1期)2016-02-28 14:25:23
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長(zhǎng)指南(2015年7期)2015-08-11 15:03:12
小雪花·成長(zhǎng)指南(2015年4期)2015-05-19 14:47:56