計算機仿真在電機及電力拖動教學中的應用
2015-02-28 02:41:48丁方莉焦俊生
銅陵學院學報 2015年4期
丁方莉 焦俊生
(銅陵學院,安徽 銅陵 244000)
計算機仿真在電機及電力拖動教學中的應用
丁方莉 焦俊生
(銅陵學院,安徽 銅陵 244000)
電機及電力拖動技術是自動化、電氣工程專業重要的專業基礎課程,該課程內容多,理論教學內容抽象難懂,學生學習過程中普遍感覺理解困難。為了提高電機及拖動的學習效果,采用仿真教學,以三相交流異步電動機正反轉為例,對正反轉過程做了仿真分析,在學習過程中,可任意改變運行參數來觀察結果,有助學生理解,從而收到了事半功倍的效果。
電機;拖動;仿真;正反轉
一、引言
電機及電力拖動技術是自動化、電氣工程及其自動化、電力電子及電力傳動等專業的重要的專業基礎課,該課程主要講述變壓器、交流異步電機、同步電機、直流電機及控制電機的原理及應用,培養學生分析問題和解決實際問題的能力,它是后續電力電子技術、交流調速系統等課程的基礎。該課程具有理論性強、概念抽象復雜、難以理解的特點,是電氣工程類專業較難教學的課程之一。學生學習本課程后,普遍感覺對該課程理解不深,概念較為模糊,為了更好地探討該課程的教學改革,加深學生對抽象問題的理解,提高學生的學習興趣,本文通過電機正反轉實例,闡述仿真教學在電機與電力拖動教學中的應用。
借助計算機仿真技術,可以彌補實驗器材缺乏的不足,減少過多的實驗耗材,根據目前電機及電力拖動教學情況,電機及拖動實驗室器件較少,滿足不了本課程所有的實驗教學,利用MATLAB仿真技術,可以完成電氣及拖動真實實驗難以完成的任務,學生還可以優化實驗對象,增強在學習交流機、直流機、同步電動機學習過程中對復雜磁路的理解,提高學習興趣,取得課程教學較好的效果。
MATLAB由Jack Little在1984年推出商用版,學術版早在1984年就由新墨西哥大學Cleve Moler教授用于線性代數、數值計算、矩陣理論等課程的教學。MATLAB語言和其它語言比較起來,如C++,Fortran等在程序編寫及可視化方面,使用上更加方便,對初學者來說,一學就會,容易上手[1]。它的主要特點在于提供許多庫存函數指令工具箱,具有Simulink視覺圖形化互動系統模擬環境,使繁雜的運算變得簡單等特點。目前,已廣泛應用于數學、工程、物理、化學、電氣工程等領域。目前,國內外大學教材更將其納入問題求解模擬的工具軟件。
二、教學過程
1.三相異步電動機正反轉的理論教學過程
以三相異步電動機正反轉作為教學示例,工作原理如圖1所示[2]。
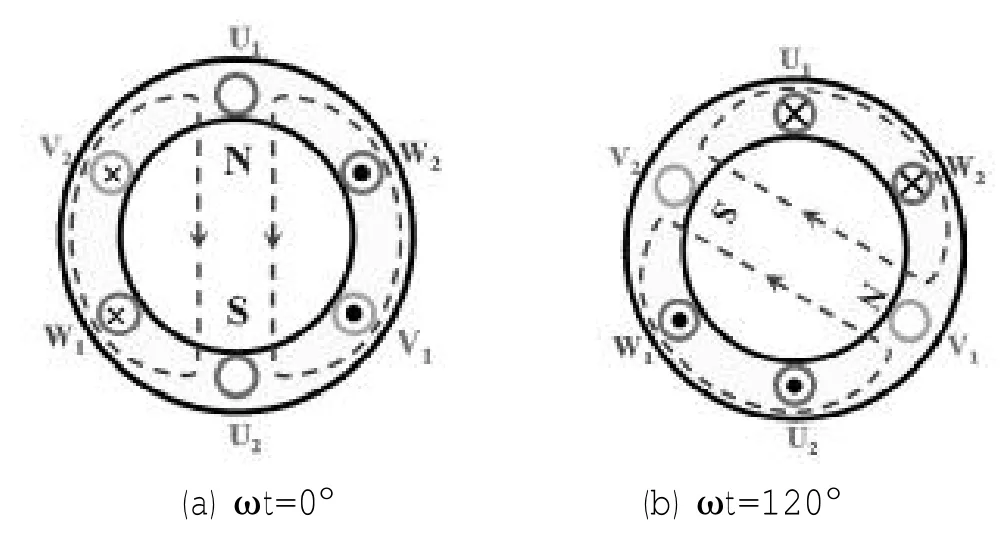
圖1 二極旋轉磁場
我們知道,對稱三相繞組通入對稱三相電流,三相交流電能產生旋轉磁場,磁感線切割轉子繞組,轉子繞組中產生e和i,轉子繞組在磁場中受到電磁力的作用,產生電磁轉矩,轉子旋轉起來。三相異步電動機要旋轉起來的先決條件是具有一個旋轉磁場,三相異步電動機的定子繞組就是用來產生旋轉磁場的[2]。
如圖1所示,U1U2、V1V2、W1W2中通入的電流分別是i1=Imsinωt,i2=Imsin(ωt-120°),i3=Imsin(ωt+120°)。當ωt=0度時,i1=0,U1U2繞組中沒有電流;i2<0,實際方向與參考方向相反相成,即從末端V2流入,用“×”表示,從首端V1流出,用“·”表示;i3>0,實際方向與參考方向相同,即從首端W1流入,從末端W2流出,根據右手螺旋定則,它們產生的合成磁場的方向如圖中虛線所示,是一個二極磁場,即一對磁場,上面的磁感應線穿出鐵心,為N極,下面的磁感應線進入鐵心,為S極。
當ωt=120度時,i1>0,即從首端U1流入,從末端U2流出;i2=0,V1V2繞組中沒有電流;i3<0,即從末端W2流入,從首端W1流出。它們產生的合成磁場的方向如圖1所示,仍是二極磁場,但合成磁場的位置已順時針旋轉了120度。同理還可繼續得到其他時刻的合成磁場,從而證明了合成磁場在空間是旋轉的。
旋轉磁場的旋轉方向與繞組中電流的相序有關。相序U、V、W順時針排列,磁場順時針方向旋轉,若把三根電源線中的任意兩根對調,例如將V相電流通入W相繞組中,W相電流通入V相繞組中,則相序變為:W、V、U,則磁場必然逆時針方向旋轉。利用這一特性我們可很方便地改變三相電動機的旋轉方向。
2.仿真教學分析
三相交流異步電動機在實際運行時,學生對它的正反轉電磁特性理解不深,為了讓學生更好地掌握交電電動機的運行特性,采用軟件仿真的方法可以讓學生形象、直觀地觀察電動機正反轉的特性,可以反復修改參數,既不存在損壞實際設備的問題,而且也能達到良好的實驗教學效果。
如圖2所示,使用Simulink電力系統SimPower-Systems仿真模塊,選取適當的電力電子器件模型搭建主電路,在Simulink模型窗口,選擇3個單相交流電壓源(AC Voltage Source)、電壓測量(Voltage Measurement)、異步電機(Asynchronous Machine)、示波器(Scope)、集線器(Demux)等模型,按圖2進行連接,建立仿真模型。仿真時把3個單相交流電壓源的幅值設置為311V,初相位分別設置為0°、120°、-120°,異步電機設置為鼠籠型(Squirrel-cage)。
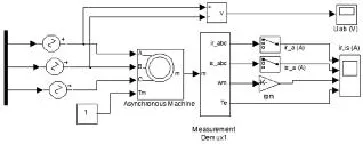
圖2 三相交流異步電動機正反轉仿真框圖
三、仿真結果分析
三相交流異步電動機正轉仿真結果如圖3所示,電磁轉矩瞬間變為正值,經過振蕩過程,逐漸變為零。
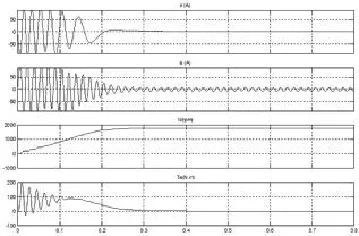
圖3 三相交流異步電動機正轉仿真波形圖
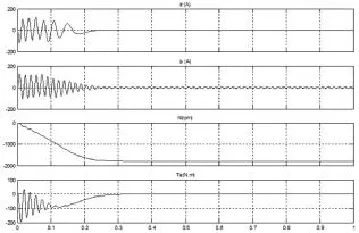
圖4 三相交流異步電動機反轉仿真波形圖
在圖2中,改變電源相序,模型重新開始運行后,反轉仿真圖如圖4所示,電磁轉矩瞬間變成負值,經過渡過程,逐漸趨近于零。
教學中發現,有部分同學認為負載轉矩始終是負轉矩,側電磁轉矩應與負載轉矩相反,其值應該為正值,其實是一種誤解。電機改變狀態前,我們可以假設轉向為順時針,這樣得到負載轉矩逆時針,電磁轉矩順時針,也就是電磁轉矩T>0,是正值,負載轉矩TL< 0,為負值,電動機狀態改變以后,電磁轉矩首先改變方向,即變為T<0,而此時電機轉向來不及變化,仍然為順時針,負載轉矩繼續為TL<0,故電動機轉速迅速減小到零,這個過程中電磁轉矩與負載轉矩都是小于零,同方向[3]。然后,電動機改變方向為逆時針,與電磁轉矩同方向,而負載轉矩則變成順時針方向,一直到電動機進入持續的穩定運行狀態。
四、結論
計算機仿真提供獨特的學習環境,它允許學習者自由控制學習環境,透過良好的可操作模塊軟件,學習者可輕易改變模塊的起始狀態,使其成為預定狀態,這些軟件接受學習者的命令后,即刻改變模塊組合形態,并在適當時機將新的組合結果顯現出來。當操作實物具有危險性或建立真實情境需時耗力時,那么此方式特別適合采用計算機仿真教學。在計算機仿真環境下,計算機快速地建立各種真實情境,讓學習者在極短時間內安全地操縱并經歷這些情境。
因此,適當的運用MATLAB軟件作為輔助工具,已成為電氣工程及其自動化、自動化專業學生不可缺少的學習課程及方向技能,而由本文所提供的例題與解題過程來看,MATLAB軟件確實適用于對電機及拖動中的交直流電機起動、反轉、制動運行的分析與模擬。學習者可看到運行動態變化行為,補償理論學習的抽象難懂之處,強化具體的學習效果。
[1]張志涌,徐彥.Matlab教程(7.0版本)[M].北京:北京航空航天大學出版社,2005.
[2]唐介.電機與拖動[M].北京:高等教育出版社,2007.
[3]潘曉晟,郝世勇.Matlab電機仿真精華50例[M].北京:電子工業出版社,2007.
Ding Fang-li,Jiao Jun-sheng
(Tongling University,Tongling Anhui 244000,China)
Application of Computer Simulation in Motor and Driving Course
Motor and driving is important professional foundation course of the automation,electrical engineering.Students feel learning difficulties because of its more course content and theoretical teaching.In order to improve the learning effect of motor and driving,the author applies the simulation teaching using positive and negative rotation of three-phase alternating current asynchronous motor.The paper analyzes simulation results of positive and negative rotation,the learning process can be changed by operation parameters arbitrarily.The method is useful for motor and driving courses teaching.
motor;driving;simulation;positive and negative rotation
G642
A
1672-0547(2015)04-0119-03
2015-07-25
丁方莉(1969-),女,安徽淮北人,銅陵學院電氣工程學院高級實驗師,研究方向:電工電子。
銅陵學院教學研究項目(JY12026)。
猜你喜歡
科教新報(2022年12期)2022-05-23 06:34:16
當代陜西(2022年6期)2022-04-19 12:11:54
娃娃樂園·綜合智能(2021年12期)2022-01-18 05:46:42
今日農業(2021年14期)2021-10-14 08:35:28
內蒙古教育(2021年20期)2021-03-08 01:09:14
海峽姐妹(2020年8期)2020-08-25 09:30:18
計算機教育(2020年5期)2020-07-24 08:53:38
家庭影院技術(2019年11期)2019-12-09 09:14:30
中學生數理化·高二版(2016年12期)2017-02-28 10:08:42
Coco薇(2016年1期)2016-01-11 16:53:24
