精確制導武器穩定平臺技術
2015-02-26 05:40:42崔大朋蘇建平
兵器裝備工程學報 2015年5期
崔大朋,蘇建平
(1.上海航天控制技術研究所,上海 201109;
2.中國航天科技集團公司紅外探測技術研發中心,上海 201109)
研究表明:導彈武器的作戰效能取決于命中精度與戰斗部裝藥量,導彈命中精度提高一倍的殺傷效果相當于戰斗部提高8倍的效果。影響導彈命中精度的因素除了導彈制導與控制系統因素之外,導引頭采用何種穩定平臺是影響導彈命中精度的重要因素之一。以美國、俄羅斯以及歐洲部分國家為代表的軍事強國紛紛加強對導引頭穩定平臺的研制,從而推動了導引頭穩定平臺技術的迅速發展。
1 導引頭穩定平臺
導引頭穩定平臺是由光、機、電、磁等多元組件結合而成的集成化產品,是導引頭的重要的組成部分。導彈在對目標進行自主搜索、跟蹤的飛行過程中,受到發動機的振動、高速氣流的沖擊以及氣動力的擾動,使得彈體在飛行過程中總是處于復雜的振動和擺動狀態,這種復雜的彈體運動引起的干擾通過與彈體連接的零部件耦合到導引頭的探測跟蹤系統,引起導引頭探測跟蹤裝置的抖動,嚴重影響導引頭視線的穩定和對目標的跟蹤,也影響了導彈的制導精度。為了消除和隔離彈體的復雜運動對導引頭探測跟蹤系統的耦合影響,通常采用穩定平臺的方式來實現。從穩定方式來說,穩定平臺通常分為被動隔離、主動穩定以及兩者的組合[1]。而用于導引頭上的穩定平臺主要是主動穩定平臺。下面對目前導引頭采用的幾種穩定平臺方式進行分析和比較。
2 穩定平臺分類
2.1 動力陀螺穩定平臺
動力陀螺穩定平臺是最早,最傳統,也是最成熟的穩定平臺。該穩定平臺是將陀螺轉子支撐在萬向支架上,依靠高速旋轉的陀螺所具有的定軸性自動實現在慣性空間的穩定,以此來隔離彈體擾動對穩定跟蹤系統的耦合干擾,同時利用動力陀螺的進動性實現對目標的隨動跟蹤。陀螺轉子的角動量越大,對彈體擾動的隔離度越強,受到的干擾也就越小,跟蹤越穩定。對于一般的戰術導彈來說,由于受到體積的限制以及定軸性與進動性的相互制約,使得動力陀螺穩定平臺的穩定性受到一定影響。在彈體具有較大的擾動速率和較大的軸向加速度的情況下,動力陀螺穩定平臺要保證足夠高的穩定精度還是比較難實現的[2],但是在滿足制導精度的條件下,這種穩定平臺方式還是得到了廣泛應用。在早期研制的點源紅外制導和線掃紅外制導導彈以及目前在研的部分紅外導彈中,使用的都是動力陀螺穩定平臺。圖1是美國AIM-9L導彈的導引頭,另外法國的“西北風”,俄羅斯的“薩姆-7”使用的都是動力陀螺穩定平臺。該穩定平臺最大的優點就是不需要額外的傳感器和反饋控制就能夠自動實現平臺的穩定,但是動力陀螺定軸性與進動性之間相互制約的矛盾,使得應用該穩定平臺的導彈跟蹤系統難以同時具有較好的穩定性和較高的跟蹤速度,這也限制了其進一步的應用范圍。

圖1 動力陀螺穩定平臺
2.2 速率陀螺穩定平臺
由于動力陀螺本身快速性和穩定性之間的矛盾限制了其進一步的發展,對于要求大跟蹤角速度的戰術導彈來說,一般采用穩定平臺的方式實現視軸的穩定。速率陀螺穩定平臺是隨著角速率傳感器的快速發展而不斷發展的一種導引頭視線穩定方式。對于一般的戰術導彈來說,速率陀螺穩定方式可以獲得較好的穩定精度和穩定帶寬,因此,大多數戰術導彈采用的是速率陀螺穩定平臺。該穩定方式將速率陀螺放置于穩定平臺的內框,通過速率陀螺來測量穩定平臺在俯仰和偏航方向的擾動,并將測速信息送給控制系統,通過反饋信息控制框架電機使得框架平臺反向運動以實現視軸在慣性空間中保持穩定。
根據穩定平臺結構方式和傳動方式的不同,導引頭用的陀螺穩定平臺有框架穩定平臺,滾仰式穩定平臺、齒弧式穩定平臺、連桿式穩定平臺和鋼絲繩傳動的穩定平臺。
1)框架穩定平臺
根據框架軸數目的不同,框架穩定平臺有兩軸、三軸和多軸框架穩定平臺等方式,各個框架軸相互垂直并相交于一點,穩定跟蹤裝置放置于內框平臺上。兩軸穩定平臺包括兩軸兩環框架和兩軸四環框架平臺。圖2所示是兩軸兩環框架穩定平臺,內環軸和外環軸分別有角位置傳感器和力矩電機,用以測量內、外環框架的轉動角度,并根據角度相關反饋信息控制框架的運動。兩軸兩框架穩定平臺是目前應用最廣泛的導引頭穩定平臺方式,具有結構相對緊湊、簡單,通道相互獨立、耦合較少,控制與跟蹤算法比較成熟等優點。但是該穩定平臺方式不能隔離載體在橫滾方向上的運動,導致視軸產生旋轉[1],對元器件、結構設計和裝配的要求也非常苛刻,同時受導引頭空間的限制,這種陀螺穩定平臺離軸角很難突破士60°,無法達到全向大離軸角跟蹤的要求。兩軸兩框架穩定平臺的導引頭典型代表有烏克蘭的MM-2000,俄羅斯的R-73,其中烏克蘭設計制造的MM-2000導引頭幾乎達到了該穩定平臺方式的極限,離軸發射角達到士60°,最大跟蹤角速度達到600°。
兩軸兩環框架穩定平臺不能完全隔離彈體對穩定平臺的影響,要完全隔離彈體的影響并解決大離軸角跟蹤問題需采用如圖3所示的三軸或兩軸四環的框架陀螺穩定平臺。但是上述2種穩定平臺在大跟蹤角的情況下,內框和外框可能發生重合,出現框架自鎖的現象,使得框架穩定平臺不能正常工作。另外,上述2種多框架穩定平臺結構復雜、體積大、質量又重等缺點,使得導引頭直徑偏大,影響了導彈的氣動性能和飛行性能,因此在戰術導彈里很少采用這2種方式的穩定平臺。在能查到的資料中,美國的“潘興II”導彈采用的就是四框架穩定平臺,如圖4所示,資料顯示在該框架穩定平臺中由于增加了一個隨動框架,從而解決了框架自鎖的問題[3]。
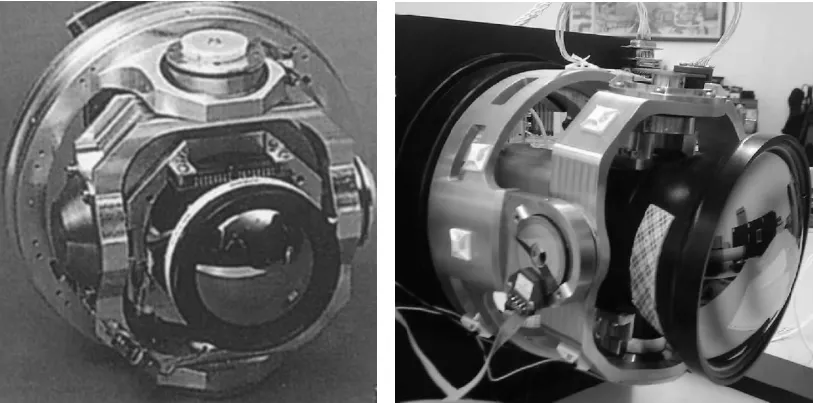
圖2 兩軸兩框架穩定平臺
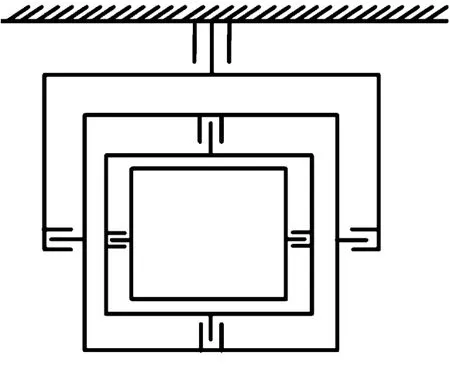
圖3 兩軸四環框架平臺
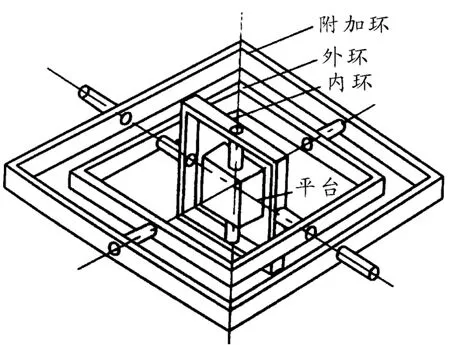
圖4 四框架穩定平臺
2)滾仰式穩定平臺
滾仰式穩定平臺包括滾轉軸和俯仰軸2個軸,以滾轉框為外框,俯仰框為內框,可以實現滾轉運動和俯仰運動2個自由度的運動,其結構形式如圖5所示。外框滾轉軸與彈體縱軸一致,內框俯仰軸與滾轉軸正交。該穩定平臺比通常的三軸框架少了一個軸,體積和質量更小,結構更簡單,并且在俯仰方向可以達到±90°,滾轉方向可以在0~360°連續旋轉,能夠實現對整個前半球空間范圍的探測跟蹤,具有大離軸角探測與跟蹤的能力,滿足近距離格斗空空彈對導引頭體積小、大離軸角、質量輕、高機動性的多項需求,是目前最先進的導引頭結構形式。但是該導引頭穩定平臺方式的固有缺陷是存在過頂跟蹤的奇異問題,即當目標在小離軸角附近機動時,要求滾轉軸框架具有無窮大的角速度,但這在工程上是難以實現的,因此在實際的應用中會出現無法正常跟蹤目標的現象。但是美國研制的AIM-9X導彈和以德國為首的歐洲多國聯合研制的IRIS-T導彈都采用了滾仰式穩定平臺,且都已服役,其過頂跟蹤問題應該得到了較好的解決,由于保密原因,相關控制方法和研究成果并沒有對外公布。根據相關資料表明AIM-9X導彈滾轉角速度高達1600°/s,德國為首研制的IRIS-T導彈滾轉角速度高達1 800°/s。

圖5 滾仰式穩定平臺
3)齒弧式穩定平臺
齒弧式穩定平臺結構在雷達導引頭中應用的相對較多,其結構示意圖如圖6所示。齒弧式穩定平臺的外框架是帶有外齒弧的圓弧形框架,外框架通過多級減速齒輪驅動,內框架放置于圓弧形框架。該種結構形式的穩定平臺擁有較大的空間,不像框架穩定平臺一樣受軸端遮擋,具有較大的離軸角和力矩輸出,低速平穩性也較好,但是齒輪傳動不可避免的存在間間隙、空回、摩擦、彈性等非線性因素,造成穩定平臺的可控性和控制帶寬不理想[4]。限制了采用該種結構形式的導引頭穩定平臺性能的進一步提高。

圖6 齒弧式穩定平臺
4)連桿傳動穩定平臺
連桿式穩定平臺如圖7所示,是由一組連桿組成平行四邊形機構并與探測跟蹤裝置相連接,通過電機驅動平行四邊形機構實現探測跟蹤裝置的方位、俯仰運動。該形式穩定平臺一般將探測器放置前端,驅動電機放置后端,從而可以節省較大的空間,縮小導引頭前端徑向尺寸,提高導彈的氣動性能,尤其是導引頭向著小型化趨勢的發展過程中,該種形式的穩定平臺更能凸顯出其優勢。圖7(a)中所示,整個平臺是連桿機構與框架機構的組合,外框通過與電機軸相連的連桿驅動,內框通過電機直驅,相對與兩軸框架穩定平臺省去了外框電機占用的空間,可以將平臺做的更小,圖7(b)完全由四連桿驅動穩定跟蹤平臺,實現起來比較困難。連桿驅動式穩定平臺由于連桿結構的限制,使得穩定平臺轉角范圍較小,不能滿足大跟蹤視場的要求,傳動效率較低,對平行四邊形連桿機構的加工、裝配和調試精度要求較高,這些缺陷也限制了其進一步的應用。
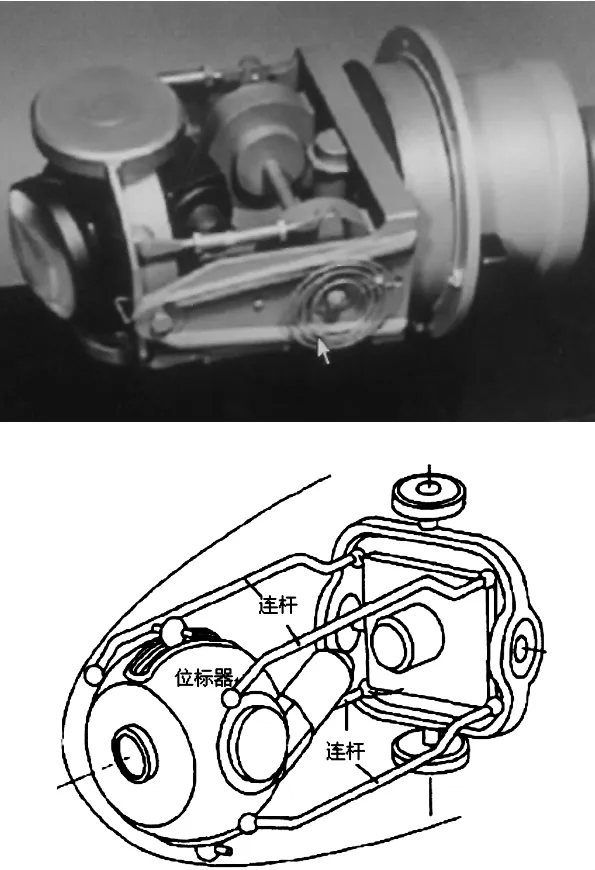
圖7 連桿式穩定平臺
5)鋼絲繩傳動穩定平臺
繩傳動雖然是一種古老的傳動方式,但是它具有簡單、輕便、靈活、振動小、負載能力大等優點,在某些高精度場合完全超越齒輪傳動,成為一種新型的精密傳動裝置,資料顯示精密繩傳動具有99%的傳動效率,傳動精度達到1微弧度。國外早已開始研究將鋼絲繩傳動應用于導引頭穩定平臺,國內研究機構也已從事相應的研究。圖8所示是2種鋼絲繩傳動的導引頭穩定平臺結構示意圖[4-5],鋼絲繩一端連接在執行機構上,另一端連接在電機力矩輸出端,通過預緊裝置保證鋼絲繩有一定的預緊力,確保鋼絲繩與槽輪間具有足夠大的摩擦力而消除傳動件之間的相對滑動。鋼絲繩傳動穩定平臺可以通過鋼絲繩的靈活性節省結構空間,將驅動電機后置,從而可以達到與齒弧式或拉桿式穩定平臺相同的效果,將導引頭小型化,同時可以實現導引頭的輕質化,并且具有較大的容納空間和離軸角。但是鋼絲繩傳動穩定平臺也有其自身的不足,由于鋼絲繩傳動固有的橫向振動特性,在短距離傳動中表現不明顯,但是在長距離傳動中,必須考慮鋼絲繩的橫向振動和傳動的平穩性。鋼絲繩的這些特性也使得導引頭成為一個多耦合運動的系統,使控制對象復雜化,增加了控制難度,影響了導引頭穩定平臺的系統性能。
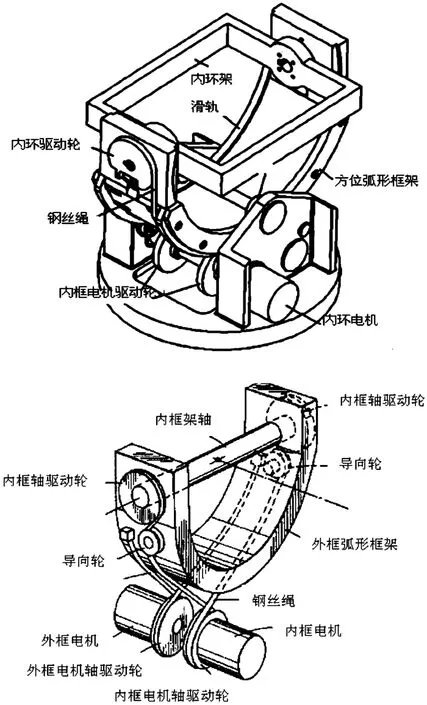
圖8 鋼絲繩傳動穩定平臺
2.3 捷聯穩定平臺
捷聯穩定平臺是隨著慣性技術、高速信息處理技術以及高精度控制技術的不斷發展,為適應導引頭朝著小型化、輕質化和智能化的方向發展而興起的一種導引頭穩定平臺方式。采用捷聯穩定平臺方式,其慣性測量元件與彈體捷聯,并提供彈體的角速度信息,高速信息處理器通過復雜的數學解算過程將垂直于視線和對準于框架軸的那部分彈體運動分離出來,并將相關信息反饋入框架控制環,控制導引頭視線軸向擾動的反向運動,從而抵消或減小彈體運動耦合到框架上的運動[6]。捷聯穩定平臺可有效減小導引頭體積,簡化結構,降低研制成本,用同一個慣性器件既可以用于平臺的穩定,又可為飛行控制系統提供彈體角速度信息,從而可實現穩定平臺與駕駛儀平臺的一體化設計。但是捷聯穩定平臺的實現對高速信息處理技術,高精度角位置傳感器和先進控制技術提出了更高的要求。
3 結束語
對于導彈系統來說,采用哪種穩定平臺方式是由多種因素決定的,包括期望的總體性能指標、載體的質量、外形限制等,不同的穩定方案和結構方式得到的穩定精度也有明顯的差異。未來導引頭朝著多模復合制導和模塊化多功能制導的趨勢發展,這對導引頭的材料、傳感器、傳動系統以及穩定平臺都提出了較高的要求。特別是導引頭的穩定平臺,其占據了導引頭40%~70%的質量和30%~50%的空間。隨著導引頭小型化、輕質化和智能化的發展需要,導引頭穩定平臺也朝著小型化、輕質化和集成化的方向發展,這需要相關研究人員探索新型的穩定平臺結構和傳動方式,合理地分配導引頭內的有限空間。
[1] 張文博.導引頭伺服機構工作特性與先進測控方法研究[D].長沙:國防科技大學,2009.
[2] 皮存宇.捷聯式天線平臺的穩定性研究[D].南京:南京理工大學,2008.
[3] 韓祖南.國外著名導彈解析[M].北京:國防工業出版社,2013.
[4] 羅護.基于精密繩傳動的導引頭機構若干問題研究[D].長沙:國防科技大學,2008.
[5] Thomas W.Bastian.Fullerton Dual cable drive rolling arc gimbal[P].United State Patent:4392140,1983 -06 -12.
[6] 周瑞青.捷聯導引頭穩定與跟蹤技術[M].北京:國防工業出版社,2010.
(責任編輯楊繼森)
