雙平行四邊形碼垛機器人的運動學分析及功能研究
2015-02-24 10:40:14柳賀萬君曾輝劉蕾
機床與液壓
2015年23期
柳賀,萬君,曾輝,劉蕾
(安徽埃夫特智能裝備有限公司蔡鶴皋院士工作站,安徽蕪湖 241009)
0 前言
隨著現代工業的發展,重載搬碼垛運機器人的應用越來越廣泛,結構設計不同,對于機器人運動學算法也不同,但最終目的相同,大多設計成4自由度的串聯機器人,有些針對該4自由度機器人應用D-H法進行運動學求解,計算量相對比較大。
文中以某公司生產的ER180機器人為研究對象,其結構由兩組平行四邊形組成。提出基于幾何法的運動學分析方法,計算量小,便于實時控制,同時對運動算法進行仿真并實際應用,完全滿足要求。
1 機器人模型與坐標系的建立
如圖1所示,主平行四邊形確定末端點位置,上臂的輔助平行四邊形使末端執行器與水平面保持一個固定的姿態。驅動主平行四邊形的電機被對稱安裝在轉座上,其分別標為軸2、軸3,對應關節角度為θ2和θ3;轉座由一個電機驅動,記為軸1,對應關節角度為θ1。前3個關節確定腕部末端點的位置,在手抓處加裝一個電機,轉角記為θ4,用以對所操作工件進行旋轉。
坐標系如圖2所示,其中全局坐標系為O0-x0y0z0,簡記為O系。各個關節為1,2,3,4系,工具坐標系為T系。

圖1 機器人三維模型
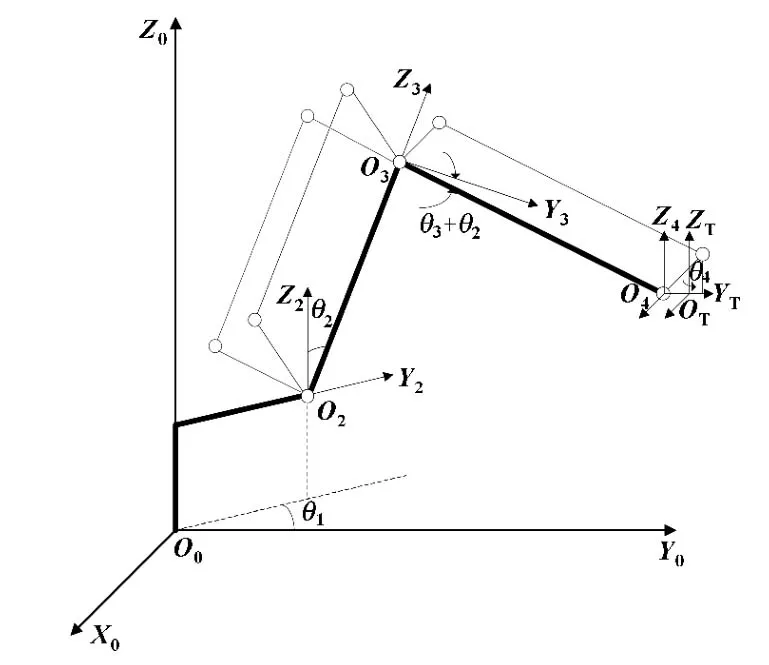
圖2 機器人坐標系
2 機器人運動學正解
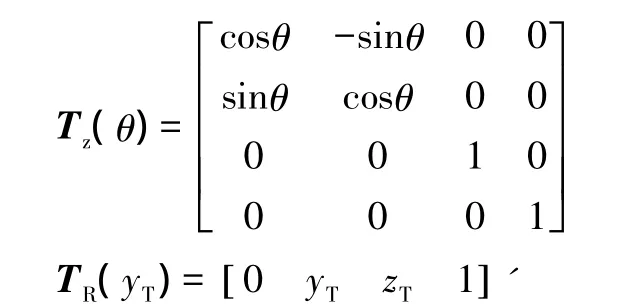
已知各個關節的轉角,求得機器人工具端OT的姿態和位置,即為機器人的正解。用坐標變換來描述為從0到T的變換。從圖2可知,從0到1的變換矩陣為1T0。依次類推2T1、3T2、4T3。從而可以得到從 0到4的坐標變換4T0。從0到T的變換為TT0=4T0TT4。即:

其中:TT4=Tz(θ4)+TR(yT,zT)
3 碼垛機器人運動學求解
已知末端的位姿,求得各個關節的轉角就是機器人的逆運動學求解。……
登錄APP查看全文