雙電機耦合驅(qū)動履帶車輛自適應(yīng)滑模轉(zhuǎn)向控制
2015-02-23 05:25:04蓋江濤黃守道周廣明劉翼馬田
兵工學(xué)報 2015年3期
蓋江濤,黃守道,周廣明,劉翼,馬田
(1.湖南大學(xué) 電氣與信息工程學(xué)院,湖南 長沙410082;2.中國北方車輛研究所 車輛傳動重點實驗室,北京100072)
0 引言
采用電傳動可以使履帶車輛實現(xiàn)能源的多元化利用,比機械或液力機械綜合傳動具有諸多無可比擬的優(yōu)點,如無級變速、效率高、易于布置、更適合于采用現(xiàn)代控制技術(shù)等優(yōu)點[1]。轉(zhuǎn)向控制技術(shù)極大地影響著車輛的機動性能。為了解決經(jīng)典的雙電機獨立驅(qū)動無法實現(xiàn)履帶車輛轉(zhuǎn)向再生功率機械循環(huán)的問題[2],文獻(xiàn)[3]提出了一種雙電機耦合驅(qū)動技術(shù)方案,是典型的雙輸入雙輸出系統(tǒng)。
目前的電傳動履帶車輛轉(zhuǎn)向控制策略,一般都沒有考慮履帶車輛的轉(zhuǎn)向動力學(xué)過程對電機的驅(qū)動轉(zhuǎn)矩做反饋性自適應(yīng)調(diào)節(jié),導(dǎo)致較難實現(xiàn)任意轉(zhuǎn)向目標(biāo)的跟蹤控制。文獻(xiàn)[4]基于神經(jīng)網(wǎng)絡(luò)PID 控制方法,實現(xiàn)了一定車速范圍內(nèi)的轉(zhuǎn)向目標(biāo)跟蹤控制,但由于其神經(jīng)網(wǎng)絡(luò)主要針對電機阻力矩進(jìn)行訓(xùn)練,較難體現(xiàn)履帶車輛高速轉(zhuǎn)向時的慣性力負(fù)載,只實現(xiàn)了低速轉(zhuǎn)向具有較好的操控性能。文獻(xiàn)[5]基于模型參考自適應(yīng)控制方法,實現(xiàn)了差速轉(zhuǎn)向控制,但控制效果較為依賴參考模型,穩(wěn)定性較差。雙電機耦合驅(qū)動雖然機械特性很好,但是雙電機的耦合作用卻使得轉(zhuǎn)向控制更加復(fù)雜。如何針對履帶車輛轉(zhuǎn)向動力學(xué)固有特性來設(shè)計魯棒性好的雙電機耦合驅(qū)動控制算法,是履帶車輛轉(zhuǎn)向控制的難題。
本文在轉(zhuǎn)向動力學(xué)模型存在不確定參量,以及兩電機驅(qū)動轉(zhuǎn)矩高度耦合的前提下,通過系統(tǒng)動力學(xué)解耦結(jié)合滑模變結(jié)構(gòu)控制,建立了一種魯棒性較好的轉(zhuǎn)向控制算法,實現(xiàn)了對履帶車輛轉(zhuǎn)向的快速穩(wěn)定控制。搭建了“駕駛員—控制器”在環(huán)的雙電機驅(qū)動耦合履帶車輛實時仿真系統(tǒng),進(jìn)行了不同工況的控制算法的仿真驗證。
1 系統(tǒng)描述
1.1 履帶車輛轉(zhuǎn)向動力學(xué)模型
建立履帶車輛轉(zhuǎn)向動力學(xué)分析圖(見圖1),O 點在固定坐標(biāo)系中的坐標(biāo)(X,Y,Z)用于確定車輛中心的運動軌跡,C 點為固定坐標(biāo)系的原點,θ 用于確定車體相對Y 軸的逆時針方向角,即車體繞Z 軸的轉(zhuǎn)角,Z 軸方向與X、Y 軸由右手定則確定。x、y、θ作為隨動坐標(biāo),它們的導(dǎo)數(shù)分別表示車輛縱向速度、車輛橫向速度、轉(zhuǎn)向角速度。
履帶車輛的轉(zhuǎn)向動力學(xué)模型為


圖1 履帶車輛轉(zhuǎn)向動力學(xué)分析圖Fig.1 Steering dynamics of a tracked vehicle
式中:FL、FR分別為左、右側(cè)的牽引力(力值為負(fù)時為制動力);FfL、FfR分別為左、右的行駛阻力;m 為履帶車輛質(zhì)量;g 為重力加速度;Fc為橫向阻力;J 為車輛繞Oz 軸的轉(zhuǎn)動慣量;B 為履帶中心距;M為地面總轉(zhuǎn)向阻力矩。
此外,還有以下關(guān)系式:

式中:TL、TR分別為左、右主動輪的阻力轉(zhuǎn)矩;r 為主動輪半徑;f 為地面行駛阻力系數(shù);fK為迎風(fēng)阻力和履帶功率耗散的等效阻力系數(shù)。
履帶車輛的運動是依靠履帶推進(jìn)的,履帶的運動是由主動輪驅(qū)動的,主動輪出現(xiàn)轉(zhuǎn)速差時,車輛就能產(chǎn)生相應(yīng)的轉(zhuǎn)向角速度。因此,主動輪才是實際的轉(zhuǎn)向運動被控對象,建立兩側(cè)主動輪上微分方程:
式中:TnL、TnR分別為傳動系統(tǒng)傳遞至左、右主動輪的驅(qū)動轉(zhuǎn)矩;nL、nR分別為左、右主動輪的轉(zhuǎn)速;JnL,JnR分別為左、右主動輪的轉(zhuǎn)動慣量。
1.2 雙電機耦合驅(qū)動運動學(xué)和動力學(xué)關(guān)系
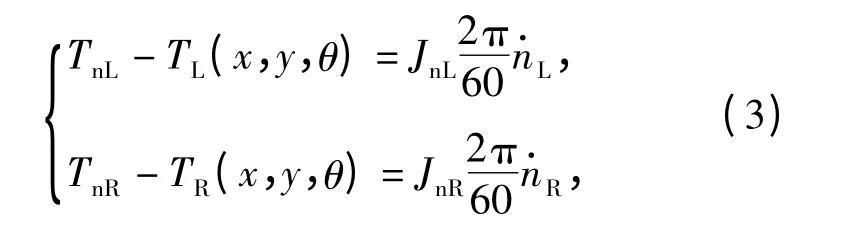
履帶車輛雙電機耦合驅(qū)動系統(tǒng),由左右兩側(cè)驅(qū)動電機、耦合機構(gòu)(中央3 個行星排)組成,如圖2所示。電機帶動耦合機構(gòu)旋轉(zhuǎn),利用耦合機構(gòu)差速差矩功能,調(diào)節(jié)兩側(cè)主動輪的驅(qū)動轉(zhuǎn)矩以適應(yīng)地面阻力,并在主動輪上形成速度差,實現(xiàn)車輛轉(zhuǎn)向。其中:kL、kR、kO分別為左、右兩側(cè)普通排及中間雙星復(fù)合排的特征參數(shù),且kL=kR=k,kO=1;nmL、nmR分別為左、右電機的轉(zhuǎn)速;TmL、TmR分別為左、右電機的輸出轉(zhuǎn)矩;ic為側(cè)傳動比。
根據(jù)行星傳動運動學(xué)和動力學(xué)關(guān)系,在耦合機構(gòu)作用下,可得如圖2 所示的雙電機耦合驅(qū)動系統(tǒng)的運動學(xué)、動力學(xué)關(guān)系:
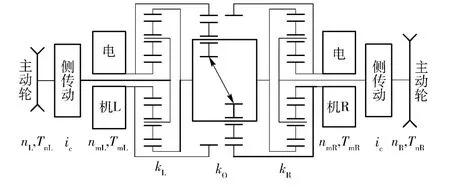
圖2 雙電機耦合電驅(qū)動系統(tǒng)圖Fig.2 System structure of double motor coupling drive transmission

轉(zhuǎn)向控制的目標(biāo)就是通過控制兩電機的轉(zhuǎn)矩TmL、TmR,使左、右兩側(cè)主動輪轉(zhuǎn)速nL、nR能跟蹤其期望轉(zhuǎn)速,從而驅(qū)動履帶車輛實現(xiàn)預(yù)定的轉(zhuǎn)向目標(biāo)。
2 轉(zhuǎn)向系統(tǒng)解耦及控制結(jié)構(gòu)分析
履帶車輛轉(zhuǎn)向的控制是根據(jù)踏板、方向盤等駕駛操縱信號決定的期望車速v*、期望轉(zhuǎn)向角速度ω*,以及反饋而來的主動輪轉(zhuǎn)速nL、nR,解算出兩電機的目標(biāo)轉(zhuǎn)矩指令經(jīng)由前述分析,方程(1)式中x、y、θ 均較難觀測,屬于不確定的參數(shù),不同工況下轉(zhuǎn)向阻力矩難以實時預(yù)測,這就使得履帶車輛轉(zhuǎn)向系統(tǒng)具有多輸入多輸出(MIMO)、非線性耦合且參數(shù)不確定的特點。如圖3 所示。

圖3 原系統(tǒng)開環(huán)控制結(jié)構(gòu)圖Fig.3 Open loop control structure of the original system
為此,須進(jìn)行系統(tǒng)解耦,以降低控制狀態(tài)變量的耦合關(guān)聯(lián)度。根據(jù)雙電機耦合驅(qū)動履帶車輛轉(zhuǎn)向系統(tǒng)運動學(xué)關(guān)系,可通過以下狀態(tài)變換設(shè)計系統(tǒng)解耦算法。

式中:vn即為經(jīng)由主動輪轉(zhuǎn)速變換得到的車速;ωn為相應(yīng)的轉(zhuǎn)向角速度。解耦同時,對系統(tǒng)其他參量做同步線性變換。

可將控制系統(tǒng)的動力學(xué)模型變換為

其中各項阻力為

Fn、Mn則可由履帶車輛轉(zhuǎn)向行駛理論計算,其中μ是轉(zhuǎn)向阻力系數(shù),由尼基金計算模型[6]得到。
通過變換后的新系統(tǒng)的控制解耦拓?fù)浣Y(jié)構(gòu)如圖4 所示。

圖4 新系統(tǒng)開環(huán)控制拓?fù)浣Y(jié)構(gòu)圖Fig.4 Open loop control structure of the new system
解耦后的等效開環(huán)控制結(jié)構(gòu)如圖5 所示。
從解耦新系統(tǒng)的開環(huán)結(jié)構(gòu)來看,狀態(tài)變量之間的耦合作用大大減弱,原MIMO 系統(tǒng)近似變換為兩個單輸入單輸出(SISO)的控制系統(tǒng):一為車速控制系統(tǒng);二為轉(zhuǎn)向角速度控制系統(tǒng)。
圖5 解耦后的等效開環(huán)控制結(jié)構(gòu)Fig.5 Equivalent open loop control structure of the decoupled system
解耦后的系統(tǒng)轉(zhuǎn)向運動控制目標(biāo)為:調(diào)節(jié)系統(tǒng)的等效轉(zhuǎn)矩輸入(uv、uω)T,使運動狀態(tài)(vn、ωn)T跟蹤期望的(v*、ω*)T。由(8)式可知狀態(tài)vn將影響狀態(tài)ωn的變化情況,而狀態(tài)ωn不影響狀態(tài)vn. 所以,將控制策略設(shè)計為:先針對v*完成vn的跟蹤控制;隨后將控制所得的vn視作已知參量,并針對ωn完成ω*的跟蹤控制。
3 控制算法設(shè)計
由于狀態(tài)vn將在一定程度上影響狀態(tài)ωn的變化情況,而狀態(tài)ωn不影響狀態(tài)vn. 所以,控制時可以先穩(wěn)定當(dāng)前車速即保持主動輪轉(zhuǎn)速和不變,再調(diào)節(jié)轉(zhuǎn)向角速度即調(diào)節(jié)兩側(cè)主動輪轉(zhuǎn)速差。這恰與履帶車輛差速式轉(zhuǎn)向的特點[7]相吻合。但新系統(tǒng)仍然具有一定的非線性和參數(shù)不確定性問題。滑模變結(jié)構(gòu)控制方法,具有較強的魯棒性控制特點,再加上綜合設(shè)計的模糊及自適應(yīng)算法,特別適合于解決前述系統(tǒng)的控制問題。
3.1 車速魯棒滑模變結(jié)構(gòu)控制算法設(shè)計
設(shè)計車速的魯棒滑模控制算法為

式中:

而mmax和mmin分別為慣量mn的上下界,可以預(yù)估或離線仿真確定。D 為滿足下式的任意非零正數(shù):

車速控制系統(tǒng)的Lyapunov 函數(shù)可取為

顯然該函數(shù)是正定的。且有


說明系統(tǒng)穩(wěn)定,車速跟蹤誤差有界。
3.2 轉(zhuǎn)向角速度自適應(yīng)模糊滑模控制算法設(shè)計
解耦后得到的轉(zhuǎn)向角速度控制系統(tǒng)中,Jn、Mn、ΔM 均未知,難以進(jìn)行精確數(shù)學(xué)描述。三者雖然具有界限,但是在不同車速、轉(zhuǎn)向角速度時其值波動較大,直接采用強制界限約束的經(jīng)典滑模控制,極易產(chǎn)生較強抖振,系統(tǒng)控制不穩(wěn)定。根據(jù)文獻(xiàn)[8 -10],可將模糊邏輯系統(tǒng)及自適應(yīng)控制方法引入到經(jīng)典的滑模變結(jié)構(gòu)控制當(dāng)中。
定義轉(zhuǎn)向角速度的跟蹤誤差為

定義積分滑模面

理想的最優(yōu)控制算法應(yīng)為

由于Mn和Jn未知,可設(shè)計模糊邏輯系統(tǒng)逼近
模糊輸入設(shè)計為兩個參量:s2,vn. 采用高斯型隸屬函數(shù),其一般形式為

模糊規(guī)則的形式設(shè)計為
Rule:IF s2isvnisTHEN u is θl,其中:為模糊控制器輸入量的模糊子集;θ =[θ1,θ2,…,θl]為模糊規(guī)則庫中規(guī)則中的“則”部分對應(yīng)的模糊集合的中心。輸出量的反模糊化采用中心解模糊進(jìn)行,為便于后文討論,定義模糊集向量ξ=[ξ1,ξ2,…,ξm]T作為輸出子集中心的權(quán)重,則有
則該模糊邏輯系統(tǒng)所實現(xiàn)的模糊控制算法為

當(dāng)取定可調(diào)參數(shù)為最優(yōu)的θ*時,模糊算法的控制量uωf(θ*)將逼近,但仍然會有誤差ε,有

實際控制中,由于路面條件在變化,難以準(zhǔn)確地找到θ*. 因此,采用其估計值即實際的模糊控制輸出應(yīng)當(dāng)為


對于偏差ε,設(shè)計切換控制算法uωs來消除。

式中:H >εmax.
因此,轉(zhuǎn)向角速度控制算法為

穩(wěn)定性證明如下:
定義Lyapunov 函數(shù)

式中:β 為預(yù)定的正實數(shù)。
整理狀態(tài)方程和滑動模態(tài)方程可知

總有
顯然,系統(tǒng)是穩(wěn)定的。
3.3 系統(tǒng)控制結(jié)構(gòu)
綜上所述,設(shè)計的雙電機耦合驅(qū)動履帶車輛控制結(jié)構(gòu)如圖6 所示。對于任意給定的期望車速v*、期望轉(zhuǎn)向角速度ω*,都可以根據(jù)車速控制系統(tǒng)的魯棒滑模控制算法求解出uv,根據(jù)轉(zhuǎn)向角速度控制系統(tǒng)的自適應(yīng)模糊滑模控制算法求解出uω,最終線性映射出電機的期望轉(zhuǎn)矩指令控制電機完成合理的轉(zhuǎn)矩輸出,實現(xiàn)轉(zhuǎn)向目標(biāo)跟蹤控制。
4 控制算法實時仿真與實驗驗證

圖6 雙電機耦合驅(qū)動閉環(huán)轉(zhuǎn)向控制結(jié)構(gòu)Fig.6 Closed loop control structure of the double motor coupling drive transmission
為了驗證控制算法的可行性和可實現(xiàn)性,通過搭建“駕駛員—控制器”[11]在環(huán)雙電機耦合驅(qū)動履帶車輛實時仿真系統(tǒng)(見圖7),進(jìn)行控制算法的實時驗證。
操縱系統(tǒng)(方向盤、踏板)、綜合控制器為實物;建立電機及其變頻器、耦合機構(gòu)等機械系統(tǒng)以及履帶車輛等動態(tài)模型,運行在dSPACE 系統(tǒng)中DS4302進(jìn)行實時模擬;控制算法通過代碼自動生成,下載到綜合控制器。通過操縱系統(tǒng)將駕駛員操作指令轉(zhuǎn)換為輸入信號輸入綜合控制器,綜合控制器運行控制算法求得兩個電機的目標(biāo)轉(zhuǎn)矩指令,通過CAN 總線發(fā)送給dSPACE 中運行的動態(tài)模型,進(jìn)行控制算法的實時仿真驗證。
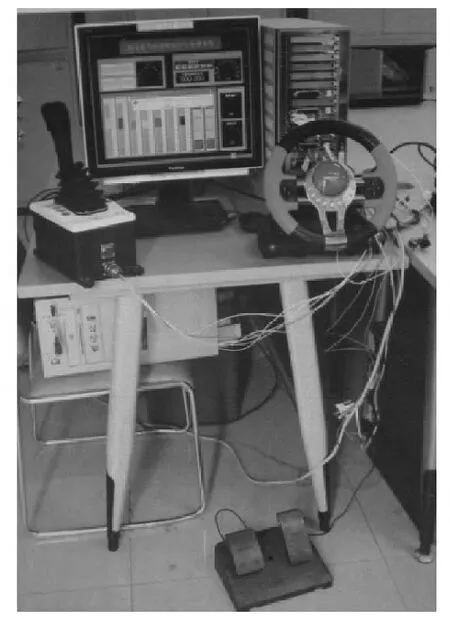
圖7 雙電機耦合驅(qū)動履帶車輛實時仿真系統(tǒng)Fig.7 Real time simulation system of the double motor coupling drive tracked vehicle
在柏油路(μmax取0.49,f 取0.038)路面下,通過油門踏板和方向盤配合,進(jìn)行車輛轉(zhuǎn)向?qū)崟r仿真。

圖8 踏板和方向盤信號Fig.8 Signals of accelerator pedal and steering wheel

圖9 左側(cè)電機的目標(biāo)轉(zhuǎn)矩及輸出轉(zhuǎn)矩Fig.9 Target torque and output torque of left motor

圖10 右側(cè)電機的目標(biāo)轉(zhuǎn)矩及輸出轉(zhuǎn)矩Fig.10 Target torque and output torque of right motor
仿真過程進(jìn)行了4 次不同轉(zhuǎn)速、轉(zhuǎn)向角速度的轉(zhuǎn)向?qū)嶒灒鐖D8 ~圖12 所示。第1 次轉(zhuǎn)向目標(biāo)車速10.0 km/h,目標(biāo)轉(zhuǎn)向角速度0.32 rad/s 對應(yīng)相對轉(zhuǎn)向半徑為3.0,實驗時車速穩(wěn)定在9.7 km/h,達(dá)到轉(zhuǎn)向角速度0.31 rad/s,實現(xiàn)的相對轉(zhuǎn)向半徑為3.1;第2 次轉(zhuǎn)向目標(biāo)車速17.0 km/h,目標(biāo)轉(zhuǎn)向角速度0.37 rad/s 對應(yīng)相對轉(zhuǎn)向半徑為4.5,實驗時車速穩(wěn)定在16.7 km/h,達(dá)到轉(zhuǎn)向角速度0.35 rad/s,實現(xiàn)的相對轉(zhuǎn)向半徑為4.7;第3 次轉(zhuǎn)向目標(biāo)車速24.0 km/h,目標(biāo)轉(zhuǎn)向角速度0.30 rad/s 對應(yīng)相對轉(zhuǎn)向半徑為8.0,實驗時車速穩(wěn)定在23.7 km/h,達(dá)到轉(zhuǎn)向角速度0.29 rad/s,實現(xiàn)的相對轉(zhuǎn)向半徑為8.2;第4 次轉(zhuǎn)向目標(biāo)車速40.0 km/h,目標(biāo)轉(zhuǎn)向角速度0.19 rad/s 對應(yīng)相對轉(zhuǎn)向半徑為21.0,實驗時車速穩(wěn)定在39.2 km/h,達(dá)到轉(zhuǎn)向角速度0.19 rad/s,實現(xiàn)的相對轉(zhuǎn)向半徑為21.9.
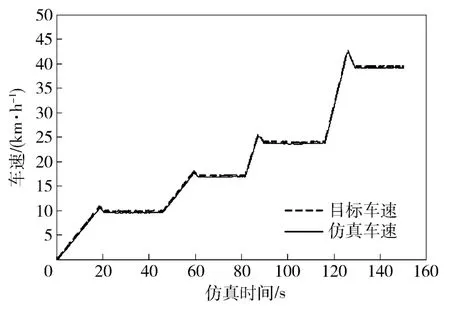
圖11 目標(biāo)車速及仿真車速Fig.11 Target and simulation forward speeds

圖12 目標(biāo)轉(zhuǎn)向角速度及仿真轉(zhuǎn)向角速度Fig.12 Target and simulation steering angular speeds
通過仿真過程可以看出:1)應(yīng)用“駕駛員—控制器”在環(huán)雙電機驅(qū)動履帶車輛實時仿真很好地驗證了轉(zhuǎn)向控制算法的可實現(xiàn)性;2)通過采用自適應(yīng)滑模轉(zhuǎn)向控制策略,解算左右電機轉(zhuǎn)矩目標(biāo),實現(xiàn)了對車速控制目標(biāo)、轉(zhuǎn)向角速度控制目標(biāo)的精確跟蹤,具有很好的控制效果。
5 結(jié)論
1)提出了一種履帶車輛雙電機耦合驅(qū)動轉(zhuǎn)向動力學(xué)的解耦算法,將原來的雙輸入雙輸出、非線性耦合系統(tǒng)解耦為兩個SISO 系統(tǒng),在不改變系統(tǒng)動力學(xué)特性的情況下,降低了參數(shù)之間的耦合作用,有利于控制律的設(shè)計。
2)基于解耦所得車速控制系統(tǒng)和轉(zhuǎn)向角速度控制系統(tǒng),分別設(shè)計了自適應(yīng)模糊滑模控制算法,仿真結(jié)果證明其能實現(xiàn)車速和轉(zhuǎn)向角速度的穩(wěn)定控制。
3)在車速較高時,車速和轉(zhuǎn)向角速度的控制誤差比車速較低時要大,這是轉(zhuǎn)向離心力增大的影響結(jié)果。因此,控制律還應(yīng)針對此作進(jìn)一步的改進(jìn)。
References)
[1]史青錄.電傳動履帶車輛轉(zhuǎn)向動力學(xué)特性研究[D]. 北京:北京理工大學(xué),2007:1.SHI Qing-lu. Study on dynamic characteristics of electric tracked vehicle on steering[D]. Beijing:Beijing Institute of Technology,2007:1. (in Chinese)
[2]孫逢春,張承寧. 裝甲車輛混合動力電傳動技術(shù)[M].北京:國防工業(yè)出版社,2008.SUN Feng-chun,ZHANG Cheng-ning. Technologies for the hybrid electric drive system of armored vehicle[M].Beijing:National Defense Industry Press,2008. (in Chinese)
[3]蓋江濤,李慎龍,周廣明,等. 一種履帶車輛機電復(fù)合傳動裝置:中國,CN101985279A[P].2011-11-02.GAI Jiang-tao,LI Shen-long,ZHOU Guang-ming,et al. A type of electro-mechanical transmission for tracked vehicle:China,CN101985279A[P].2011-11-02. (in Chinese)
[4]翟麗,孫逢春,谷中麗.電子差速履帶車輛轉(zhuǎn)向轉(zhuǎn)矩神經(jīng)網(wǎng)絡(luò)PID 控制[J].農(nóng)業(yè)機械學(xué)報,2009,40(2):1 -4.ZHAI Li,SUN Feng-chun,GU Zhong-li. Neural networks PID control of steering torque for electronic differential tracked vehicle[J].Transactions of the Chinese Society for Agricultural Machinery,2009,40(2):1 -4. (in Chinese)
[5]劉翼,毛明,馬曉楓,等.零差速電傳動履帶車輛轉(zhuǎn)向負(fù)載自適應(yīng)控制策略研究[J].車輛與動力技術(shù),2013(1):7 -11.LIU Yi,MAO Ming,MA Xiao-feng,et al. Research on self-adaptive steering control strategy for single motor cross drive electric transmission for tracked vehicles[J]. Vehicle & Power Technology,2013(1):7 -11. (in Chinese)
[6]LIU Long,ZHAI Li,F(xiàn)ENG Hui-xia. Effects of dynamic characteristics of motor on steering dynamics of electric drive tracked vehicle[J].Journal of Beijing Institute of Technology:English Edition,2011,20(2):149 -156.
[7]Wong J Y,Chiang C F. A general theory for skid steering of tracked vehicles on firm ground[J]. Proceedings of the Institution of Mechanical Engineers,2001,215(3):343 -355.
[8]劉金琨. 滑模變結(jié)構(gòu)控制MATLAB 仿真[M]. 北京:清華大學(xué)出版社,2005,379 -387.LIU Jin-kun. Sliding mode control design and MATLAB simulation[M]. Beijing:Tsinghua University Press,2005:379 -387. (in Chinese)
[9]王聲遠(yuǎn),霍偉.不確定非完整動力學(xué)系統(tǒng)的自適應(yīng)模糊滑模控制器[J].控制理論與應(yīng)用,2003,20(3):427 -431.WANG Sheng-yuan,HUO Wei. Adaptive fuzzy sliding-mode controllers of uncertain dynamic nonholonomic systems[J]. Control Theory & Applications,2003,20(3):427 -431. (in Chinese)
[10]劉金琨,孫富春.滑模變結(jié)構(gòu)控制理論及其算法研究與進(jìn)展[J].控制理論與應(yīng)用,2007,24(3):407 -418.LIU Jin-kun,SUN Fu-chun. Research and development on theory and algorithms of sliding mode control[J]. Control Theory &Applications,2007,24(3):407 -418. (in Chinese)
[11]鄒淵,孫逢春,張承寧.電傳動履帶車輛“駕駛員——綜合控制器”在環(huán)的雙側(cè)驅(qū)動控制實時仿真[J]機械工程學(xué)報,2007,43(3):193 -198.ZOU Yuan,SUN Feng-chun,ZHANG Cheng-ning. Electric tracked vehicle real-time simulation of dual-motor driving control with driver-global controller in-loop[J]. Chinese Journal of Mechanical Engineering,2007,43(3):193 -198. (in Chinese)