一種多目標跟蹤濾波方法研究
2015-02-22 03:14:06熊毅
雷達與對抗 2015年4期
熊 毅
(中國電子科技集團公司第三十八研究所,合肥 230088)
一種多目標跟蹤濾波方法研究
熊毅
(中國電子科技集團公司第三十八研究所,合肥 230088)
摘要:針對雷達在實際探測過程中出現的發現概率低、點跡方位抖動、目標機動等現象,通過對傳統濾波方法的自適應調整,提出了一種基于目標運動特性的自適應濾波方法。該方法以α-β濾波為基礎,通過對目標運動特性分析,自適應調整濾波參數,解決了復雜環境下的目標跟蹤不連續、跟蹤偏離航道、航跡不平滑等問題,在一定程度上提高了雷達對目標的探測性能。實踐表明,該方法能夠滿足性能指標要求,改善雷達畫面目標跟蹤效果,在工程實踐上具有一定的實用價值。
關鍵詞:雷達;多目標跟蹤; 復雜環境;濾波
0引言
隨著現代防空預警雷達技術的發展,利用多目標跟蹤技術能夠實現多個目標的探測與跟蹤。然而對于雷達數據處理[1]來說,雷達前端送出的信號點跡和二次雷達點跡質量往往影響著航跡關聯與航跡濾波預測的效果。在雷達實際探測目標的過程中,由于地形遮蔽、信號干擾、信號檢測門限以及二次雷達性能等原因容易造成目標發現概率低、點跡方位抖動,再加上目標機動[2]等因素,極易產生航跡不連續、航跡不平滑、機動目標跟蹤不上等現象,影響到雷達畫面多目標跟蹤的效果。因此,為了提高對多目標航跡跟蹤的質量,改進雷達實際工作中的畫面跟蹤效果,本文設計了一種基于目標運動特性的自適應α-β濾波方法,并通過在實際工程上的應用表明了該方法的有效性。
1α-β濾波算法
在雷達數據處理工程應用中,由于α-β濾波器[3]計算量小,算法模型和濾波增益計算較為簡單、實時性強,故被廣泛地應用于各種濾波器的設計中。α-β濾波一般假設目標作勻速直線運動,即坐標位置x對時間t的二階導數為0。在實際處理中一般把目標加速度作為高斯白噪聲來處理,因此目標狀態方程和觀測方程分別假設如下:

(1)

(2)


(3)

(4)

(5)
α-β濾波器把加速度作為高斯白噪聲,不考慮加速度的影響,簡化了狀態與量測方程,在目標做直線運動時可以使濾波后的置位與速度均方差達到最小。文獻[4]中已經證明了α和β的最優關系為
(6)
從上述濾波模型不難看出,α-β濾波算法是在預先給定α和β數值的情況下進行的濾波與估計。當目標噪聲統計特性不滿足假設要求或是目標機動時,目標狀態估計與實際狀態之間往往存在較大差別,影響目標跟蹤的穩定性。為了使α-β濾波算法具有良好的穩態噪聲濾波能力和機動瞬態響應能力,本文設計了一種基于目標運動特性的自適應調整濾波模型參數的濾波方法。
2本文自適應濾波方法
由α-β濾波模型可以看出,只要確定了α,根據公式(6) 也可以把β確定下來。這里可以根據目標運定特性只考慮模型中對參數α的自適應調整,而參數α只涉及到對目標位置的濾波與估計,這里只考慮目標坐標位置的濾波與預測。設目標坐標位置濾波方程為

(7)

(8)

(9)

(10)
圖1是目標在直線運動過程中的運動特征變量示意圖,目標在k-1時刻由A點沿直線飛行至k時刻的B點,B點是目標在k時刻的預測位置,C點是由于信號觀測噪聲或機動等原因造成偏離航道的觀測位置。圖中線段BC的長度為D1(k),線段CE的長度為D2(k)。從圖1不難看出,采用α-β濾波算法得到的目標濾波位置應該在B點與C點之間。如果目標處于直線運動狀態下,航跡質量比較高,這時應盡量減小觀測點C對濾波位置的干擾因素,使濾波位置接近于B點;如果此時目標處于機動狀態,為了盡量保持航跡的平滑效果和避免航跡丟點,濾波點跡應該逐步收斂到觀測點,濾波點跡一般在在三幀之內收斂于觀測點跡。
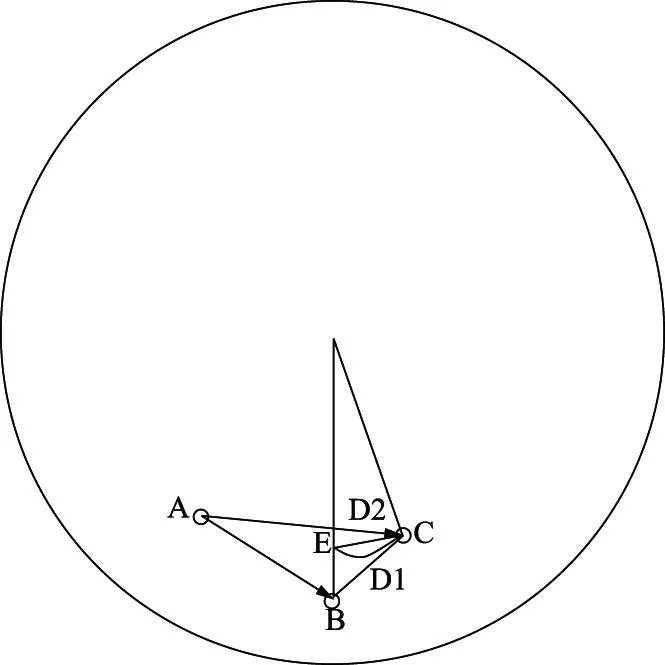
圖1 目標沿直線運動的運動特征變量示意圖

(1) 對每一個自動起始或波門起始的航跡,初始化航跡參數q(0)和α(0);
(2) 當點航跡相關成功且能夠確定目標航向時,計算觀測點跡與預測點跡的距離殘差D1(k)和切向距離間隔D2(k);

(4) 計算濾波增益α(k),令αmin和αmax分別表示最小最大濾波增益,且0<αmin<αmax<1,如果目標不丟點,則α(k)=αmin+[D1(k)-r0]/[r1-r0]·(αmax-αmin),否則根據航跡質量q(k-1)計算濾波增益α(k)=λ1α(k-1)+λ2αmax,其中λ1、λ2由q(k-1)與q3、q2和q1大小關系確定,且λ1+λ2=1,可根據實際情況進行調整;
(5) 如果目標不丟點,根據D1(k)與大、小波門預置偏差r1、r0的關系、q(k-1)以及目標徑向飛行時的幀間距離變化率△r=|[yr(k)-yr(k-1)]-[yr(k-1)-yr(k-2)]|計算航跡質量q(k),否則根據丟點數、q(k-1)與q3、q2的關系計算q(k);
(6) 根據濾波方程(7)和(8)計算目標濾波后的坐標位置,當前濾波計算輸出后,跳轉至(2)轉入下一幀k=k+1時刻的濾波計算,直到目標衰落。
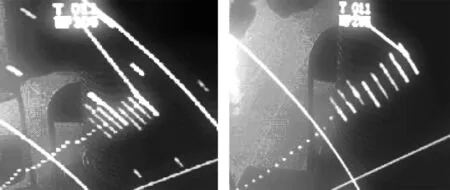
在本文設計的基于目標運動特性的自適應目標濾波方法中,為了保證受擾動的目標方位觀測在濾波計算后,既能保持濾波的平滑性又能兼顧濾波的快速收斂,避免航跡跟蹤偏離航道。在算法設計中限制了幀間連續觀測修正次數i≤3,每一次觀測修正系數δi1、δi2應根據上一次濾波收斂情況作動態調整。當算法中完成對目標的觀測修正后,應該轉換到直角坐標系下進行相應的濾波計算,以保證該自適應濾波算法的線性有效性。另外,對于反映目標運動特性的兩個重要的統計變量q(k)和切向距離間隔D2(k),它反映了目標在相當長一段時間內的目標運動平穩性。這里有兩點需要說明:第一,如果目標航跡質量q(k-1)>q3且目標非機動時,如果q(k)、q(k+1)計算結果是逐步減小的,需要保證q(k)>q(k+1)>q2,這是因為在目標處于長時間平穩跟蹤狀態下,目標出現兩幀以內的方位抖動或丟點時應該保持航跡質量的穩定,有利于航跡濾波的平滑性;第二,如果觀測修正后切向距離間隔D2(k)>r0,且變化范圍比較小時則表明模型在自適應非平穩噪聲等因素造成的觀測擾動,如果D2(k) 3實驗結果 雷達數據處理的一個難點在于復雜環境下由于各種未知因素造成的方位 “抖動”、目標丟點,加上目標機動等因素,容易造成跟蹤濾波器很難趨于平穩,造成航跡質量的下降和濾波增益的增加,從而影響跟蹤濾波器的收斂性,不能形成較為平滑的航跡,甚至會造成跟蹤發散跟丟目標的現象。本文所采用的基于目標運動特性的自適應濾波方法,通過對濾波增益和目標方位觀測的自適應調整,減小了目標觀測方位的“抖動”,在一定程度上能加快跟蹤濾波器的收斂,使目標航跡更為平滑。 圖2是雷達實際工作過程中目標方位連續偏離的跟蹤濾波效果對比圖示例,圖2(a)是α-β濾波算法的跟蹤效果,圖2(b)是基于運動特性的自適應濾波跟蹤效果。從該圖不難看出,基于運動特性的自適應濾波方法能夠在目標出現方位量測偏離時逐步逼近目標觀測位置,不會產生圖2(a)中那樣的“斷層”缺口,使濾波后的航跡更加平滑。圖3是采用自適應濾波算法后的目標跟蹤濾波效果。從圖3(a)和(b)可以看出,采用本文的自適應濾波算法后,目標航跡不會因為丟點或目標機動而快速收斂于觀測點,有效避免了航跡跳點現象,提高了目標航跡跟蹤的平滑性和穩定性。圖3(c)是目標在幾乎只有二次雷達點跡且二次點跡連續偏離航道情況下的濾波效果。從該圖可以看出,在濾波過程中根據目標運動特性自適應計算濾波增益和修正量測,能夠保證濾波位置不受二次雷達點跡方位偏離的影響而穩定跟蹤目標。 (a) 采用α-β濾波算法跟蹤效果 (b) 本文自適應濾波跟蹤效果 4結束語 在雷達實際工作中,信號處理送出的目標點跡容易受到地物遮蔽、信號干擾、目標機動以及性能下降等因素的影響,造成目標丟點或是觀測點跡在一定范圍內的位置擾動,從而影響航跡濾波算法的收斂速度和平滑效果,對目標穩定跟蹤造成了很大困難。本文提出的基于目標運動特性的自適應濾波算法有效地解決了α-β濾波算法濾波增益必須提前設定的常增益問題,能夠根據目標在一定時間內的穩定性和當前目標觀測結果自適應調整該濾波模型的各變量參數,保證了目標在受到非平穩噪聲、目標機動、目標丟點以及二次雷達性能下降時的濾波器收斂性,提高了航跡平滑效果,改善了雷達畫面跟蹤質量,在工程應用中具備一定的實用性。 參考文獻: [1]吳順君,梅曉春.雷達信號處理和數據處理技術[M].北京:電子工業出版社,2008:448-470. [2]周宏仁,敬忠良,王培德.機動目標跟蹤[M].北京:國防工業出版社,1991. [3]王曉偉,金宏斌,楊龍波,等.基于α-β和δ-ε濾波器的機動目標跟蹤[J].現代雷達,2006,28(7):56 -58. [4]KALATAPR.TheTrackingIndex:AGeneralizedParameterforα-βandforα-β-γTargetTrackers[J].IEEETransonAES,1984,20(2):174 -182. A multi-target tracking filter method XIONG Yi (No.38 Research Institute of CETC, Hefei 230088) Abstract:An adaptive filter method is presented based on the target motion features through the adaptive adjustment of conventional filter methods, due to such phenomena as the low detection probability, jittered azimuth and maneuvering targets in the process of radar detection. Based on the filter algorithm, with the analysis of the target motion features and the adaptive adjustment of the filter parameters, some problems are solved including discontinuous target tracking, course deviation and unsmooth track in the complex environment, improving radar detection capability to some extent. It is indicated that the method can satisfy the requirements of the performance index and improve the target tracking effect displayed on the radar console, which has some practical value in engineering application. Keywords:radar; multi-target tracking; complex environment; filter 中圖分類號:TN958 文獻標識碼:A 文章編號:1009-0401(2015)04-0025-04 作者簡介:熊毅(1981-),男,高級工程師,碩士,研究方向:軟件系統設計、雷達數據處理算法研究及軟件開發。 收稿日期:2015-04-14