采煤機慣性導航安裝偏差對定位誤差的影響
2015-02-21 01:51:17郝尚清王世博葛兆亮張智喆葛世榮
煤炭學報 2015年8期
郝尚清,李 昂,王世博,葛兆亮,張智喆,葛世榮
(1.中國礦業大學機電工程學院,江蘇徐州 221116; 2.中國礦業大學礦山智能采掘裝備協同創新中心,江蘇徐州 221116; 3.太重煤機有限公司,山西太原 030032)
?
采煤機慣性導航安裝偏差對定位誤差的影響
郝尚清1,2,3,李 昂1,2,王世博1,2,葛兆亮1,2,張智喆1,2,葛世榮1,2
(1.中國礦業大學機電工程學院,江蘇徐州 221116; 2.中國礦業大學礦山智能采掘裝備協同創新中心,江蘇徐州 221116; 3.太重煤機有限公司,山西太原 030032)
摘 要:慣性導航裝置安裝于采煤機機體上,導航解算時以慣性導航裝置坐標系代表采煤機坐標系,當其安裝存在偏差時,慣性導航裝置坐標系不能代表采煤機坐標系,進而會影響采煤機的定位精度。根據航位推算原理,建立了采煤機慣性導航安裝偏差所引起的采煤機定位誤差模型,獲得慣性導航裝置安裝偏差與采煤機定位誤差之間的關系。安裝偏差中的航向偏差與俯仰偏差對采煤機定位誤差的影響較大,橫滾偏差對采煤機定位誤差影響較小,并且定位誤差主要集中在高度方向及垂直于采煤機運動的方向。構建的定位誤差模型為確定慣性導航裝置的安裝精度要求與補償安裝偏差引入的采煤機定位誤差提供了理論依據。
關鍵詞:采煤機定位;慣性導航;安裝偏差;誤差模型
責任編輯:許書閣
郝尚清,李 昂,王世博,等.采煤機慣性導航安裝偏差對定位誤差的影響[J].煤炭學報,2015,40(8):1963-1968.doi:10.13225/ j.cnki.jccs.2014.1561
采煤機定位技術是實現長壁綜采工作面自動化的關鍵技術之一[1],對于作業空間狹小,工作條件惡劣,回采效率低的薄煤層,實現工作面自動化能有效的提高資源回收率,提高工人安全系數,降低工人勞動強度[2-3]。目前采煤機定位技術主要有紅外定位法[4]、無線傳感器網絡法[5-6]、軌道里程計法[7]、激光定位法[8]、超聲波定位法[9-10]以及基于捷聯慣性導航[11]的采煤機定位技術。其中,基于慣性導航的采煤機定位技術是國內外研究的熱點,也是最具應用前景的采煤機三維定位技術。Schiffbaue[11]提出了一種使用激光陀螺儀和加速度計獲得連續式采煤機的航向和位置的方法。Yuta[12]將慣性導航技術應用于長壁工作面采煤機定位,并測試了慣性導航的漂移、精度。Mark T.Dunn等[13]介紹了慣性組合采煤機定位技術,進一步提高了采煤機的定位導航精度。方新秋等[14]采用陀螺儀和加速度計分別測量采煤機的航向角及水平面內兩個方向的加速度,通過對加速度兩次積分獲得采煤機在水平面的位置。張斌等[15]提出了基于陀螺儀和里程計的采煤機二維定位方法,使用陀螺儀測出采煤機的航向角,里程計測得采煤機的速度,經過航位推算方法求得采煤機的位置。樊啟高等[16-17]研究使用三軸陀螺儀和三軸加速度計分別測出采煤機相對于慣性空間的角速度和加速度,積分運算獲得采煤機的位置、姿態和速度信息而進行采煤機三維定位。基于捷聯慣性導航與軸編碼器組合的采煤機定位技術,慣性測量單元(IMU,inertial measurement unit)直接安裝在采煤機機體上,且IMU坐標系各坐標軸應與采煤機坐標系的相應坐標軸應平行,軸編碼器安裝在采煤機牽引部測量采煤機在載體坐標系下的速度。通過航位推算算法,根據軸編碼器測得的采煤機速度、IMU測得采煤機姿態進行位置解算,獲得采煤機的三維位置與姿態。該定位方案避免了加速度的兩次積分,并可降低位置解算的頻率,能有效抑制慣性導航的誤差累積,大大提高了采煤機慣性定位的精度。但是,如果IMU安裝存在偏差,即IMU坐標系與采煤機坐標系不重合,二者坐標軸之間存在偏差角,將影響采煤機定位導航計算的精度。本文分析了IMU安裝偏差對采煤機定位精度與采煤機姿態精度的影響,建立了采煤機慣性導航裝置安裝偏差所引起的采煤機定位誤差模型,獲得慣性導航裝置安裝偏差與采煤機定位誤差之間的關系。并通過仿真試驗驗證了模型的有效性。
1 采煤機運動分析
長壁綜采系統主要由三大部分組成,采煤機、刮板輸送機和液壓支架。采煤機主要任務是落煤和裝煤,刮板輸送機負責將煤運出工作面同時作為采煤機的運行軌道,液壓支架支護頂板,為采煤提供作業空間以及推移刮板輸送機。圖1為采煤機運行軌跡和刮板輸送機形狀示意,圖中虛線為采煤機運行軌跡線;實線為刮板輸送機彎曲形狀線;L為工作面的長度;d為采煤機截深。采煤機以刮板輸送機為軌道沿工作面往復循環割煤,當其運行過一定距離后,液壓支架開始沿工作面推進方向推移刮板輸送機,直到推移距離達到采煤機的截深d。采煤機工作在第n個截割循環時,從P( n -1)1點處開始以截深d沿左端部斜虛線進行斜切進刀,采煤機運行到刮板輸送機直線處,左端部刮板輸送機已被液壓支架推直,然后開始回割三角煤到Pn1點處,然后沿采煤機牽引方向正常割煤直到Pnk點處,完成第n次截割循環。按同樣的方式從Pnk點處開始,到P(n+1)1處結束,完成第n+1個截割循環[17]。
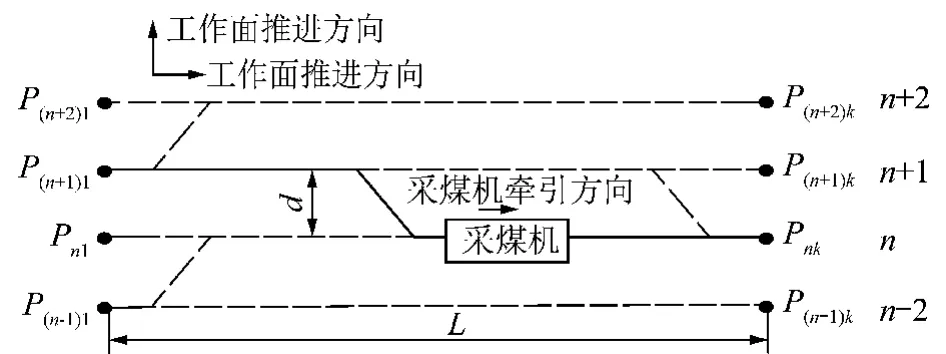
圖1 采煤機運動軌跡和刮板輸送機形狀示意Fig.1 Schematic of shearer trajectory and shape of scraper conveyor
2 定位誤差模型
2.1 位置誤差
采煤機坐標系OXbYbZb與IMU坐標系OXsYsZs定義分別如圖2(a)和(b)所示。
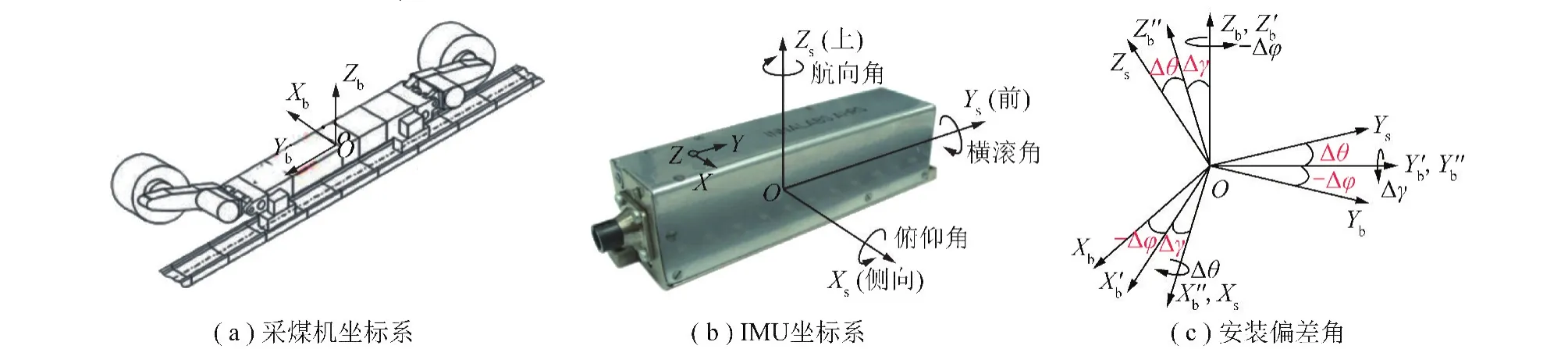
圖2 采煤機坐標系與IMU坐標系及其安裝偏差角Fig.2 Schematic of the coordinates of shearer and IMU installation noncoincidence between the two coordinates
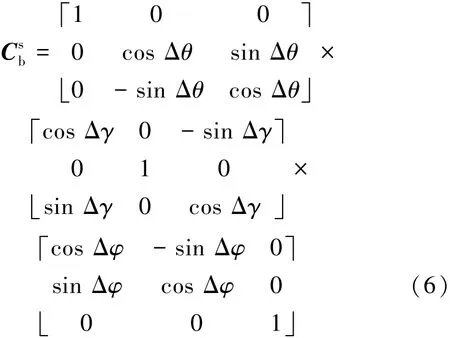
圖2(b)中箭頭所指旋轉方向為相應姿態角的正方向。采煤機慣性測量單元安裝在采煤機機身時要保證其坐標系坐標軸與采煤機坐標系對應坐標軸平行,即IMU安裝偏差角都等于0。此時IMU測量的姿態角即為采煤機姿態角。當IMU安裝存在偏差時,即采煤機坐標系與IMU坐標系對應坐標軸不平行,IMU測得姿態角φ(IMU實測航向角),θ(IMU實測俯仰角),γ(IMU實測橫滾角)與采煤機實際姿態角φre(采煤機實際航向角),θre(采煤機實際俯仰角),γre(采煤機實際橫滾角)不一致,IMU坐標系、采煤機坐標系及安裝偏差角Δφ航向角偏差、Δθ俯仰角偏差、Δγ橫滾角偏差之間的關系如圖2(c)所示。采煤機坐標系變換到IMU坐標系可由3個旋轉矩陣來表示,旋轉順序如圖3所示,采煤機坐標系OXbYbZb繞Zb軸旋轉-Δφ得到OX′bY′bZ′b坐標系,然后OX′bY′bZ′b坐標系繞Y′b軸旋轉Δγ得到OX″bY″bZ″b坐標系,最后OX″bY″bZ″b坐標系繞X″b軸旋轉Δθ得到IMU坐標系OXsYsZs。

圖3 采煤機坐標系至IMU坐標系的轉換關系Fig.3 Relation between the coordinates of shearer and IMU
由采煤機牽引部軸編碼器實時測得單位時間內位移增量在采煤機坐標系下的表示為Pb,變換到東北天坐標系(定位坐標系)下表示為Pn,導航解算過程中的坐標變換方程為


當IMU安裝存在偏差時,定位解算過程中仍以IMU測得的姿態代表采煤機姿態,變換方程為



將式(5)代入式(1),可得

式(7)減式(3)可知,安裝誤差引起的每一采樣時刻位置誤差ΔP如式(8)所示。

式中,I為單位矩陣。
由安裝誤差引起的采煤機位置誤差ΔS由式(9)所示。

由式(9)可知,采煤機位置誤差受到φ(t),θ(t), γ(t),Δφ,Δθ,Δγ,Pb(t)等6個變量的影響。其中φ(t),θ(t),γ(t)與Pb(t)分別為IMU與軸編碼器的測量值。本文主要分析安裝偏差造成的采煤機位置誤差,故認為IMU與軸編碼器為理想輸出值,其測量誤差未包含在誤差模型中。采煤機運動過程中φ(t),θ(t),γ(t)與Pb(t)均為時變量,φ(t),θ(t), γ(t)的值不會對總誤差造成影響,僅會對位置誤差在東、北、天3個坐標方向的分布產生影響。Pb(t)的值雖然會對瞬時誤差ΔP的大小造成影響,若采煤機運動一個特定的距離,Pb(t)的瞬時值不會對采煤機總的誤差ΔS造成影響。對于一個特定的運動距離采煤機總的誤差ΔS將取決于安裝偏差Δφ,Δθ,Δγ的大小。
2.2 姿態誤差
根據式(2)可以確定采煤機實際姿態角φre,θre, γre的主值。
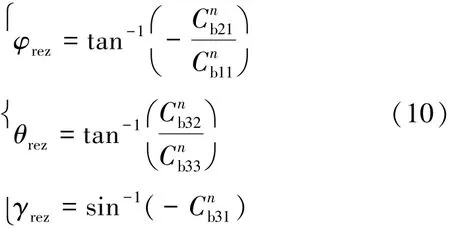
航向角φre的定義域為(0°,360°)。俯仰角θre的定義域為( -90°, +90°)。橫滾角γre的定義域為(-180°,+180°)。由于采煤機實際運行特點,橫滾角實際值不會超過(-90°,+90°),所以橫滾角與俯仰角的取值范圍包含于反正切函數與反正弦函數的主值域內,其主值就是其真值;航向角的實際取值域與反正切函數的主值域不一致,所以在求得航向角的主值后還要根據或的符號來確定其真值。故φre,θre,γre的真值可以表示為
3 仿真試驗
根據研究的側重點,忽略IMU姿態測量誤差、采煤機牽引部軸編碼器速度測量誤差、導航解算計算機的計算誤差等,著重考慮IMU的安裝偏差對采煤機定位誤差的影響。采用Matlab仿真軟件按以下3種條件下進行仿真計算,仿真計算時間步長0.5 s。
(1)采煤機航向角0°,俯仰角0°,橫滾角0°,即采煤機沿南北方向運動,運動距離300 m,運動速度6 m/ min,運行時間50 min。采煤機初始東方向位置0 m,北方向位置0 m,高度方向0 m。
(2)采煤機航向角為30°,60°,其他參數同條件(1)。
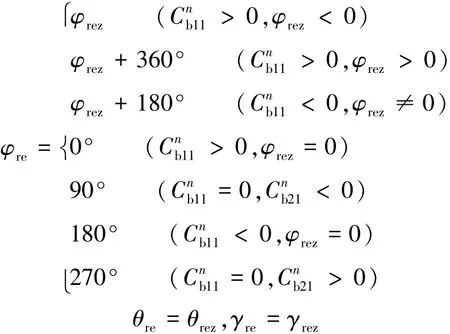
(3)采煤機按照一個截割循環軌跡運行(圖4),即工作面方向沿東西方向,推進方向沿南北方向,工作面斜長為300 m,工作面傾角為10°,采煤機截深為1.0 m,航向角安裝偏差為1°,俯仰角安裝偏差為1°,橫滾角安裝偏差為1°。
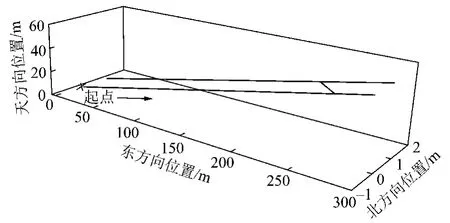
圖4 采煤機仿真運動軌跡Fig.4 Simulation track of a shearer
對于仿真條件(1)在不同的安裝偏差下采煤機的導航誤差項最大值見表1。
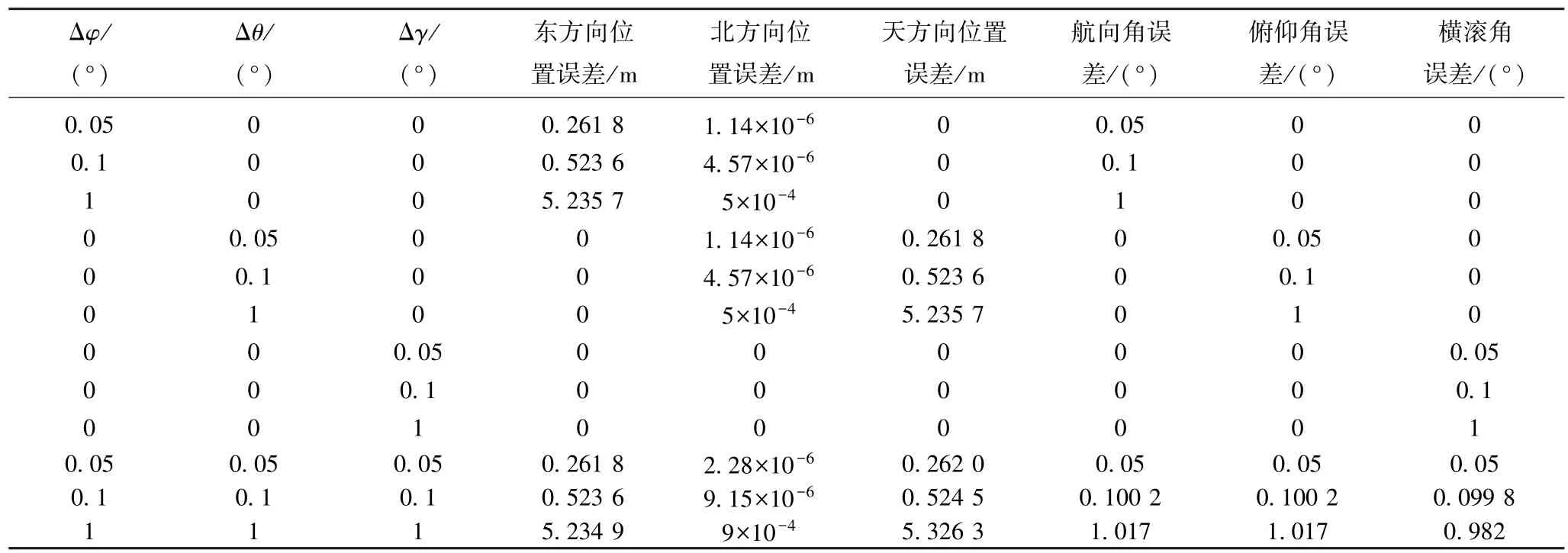
表1 仿真條件(1)下IMU不同安裝偏差條件下采煤機導航定位參數誤差項Table 1 Positioning errors of a shearer under different installation deviation according to condition (1)
由表1數據可知,航向角安裝偏差和俯仰角安裝偏差對采煤機定位誤差影響較大,而且采煤機定位誤差隨著這兩個安裝偏差的增大而增大。橫滾角安裝偏差對采煤機定位誤差影響較小,若只有橫滾角存在安裝偏差時,則不會對采煤機定位誤差帶來影響。若各安裝偏差在0.1°以內,引入的各方向定位誤差在0.524 5 m以內;若各安裝偏差在1°以內,引入的各方向定位誤差在5.326 3 m以內。安裝偏差較小時,安裝偏差引起的姿態誤差與安裝偏差近似相等。
對于仿真條件(2)在不同的安裝偏差下采煤機的導航誤差項最大值見表2。由仿真條件(1)可知,安裝偏差較小時,安裝偏差引起的姿態角誤差與安裝偏差近似相等,故在表2中姿態角誤差項不再列出。由表2數據知,當采煤機運行航向角不同,即采煤機沿不同方向運動時由安裝偏差引起的總定位誤差不會改變,只是定位誤差在東北方向坐標軸上的分量改變。安裝偏差引起的采煤機定位誤差主要在高度方向和垂直于采煤機運動方向,俯仰角安裝偏差主要引起高度方向的定位誤差,航向角安裝偏差主要引起沿采煤機運動垂直方向的定位誤差。
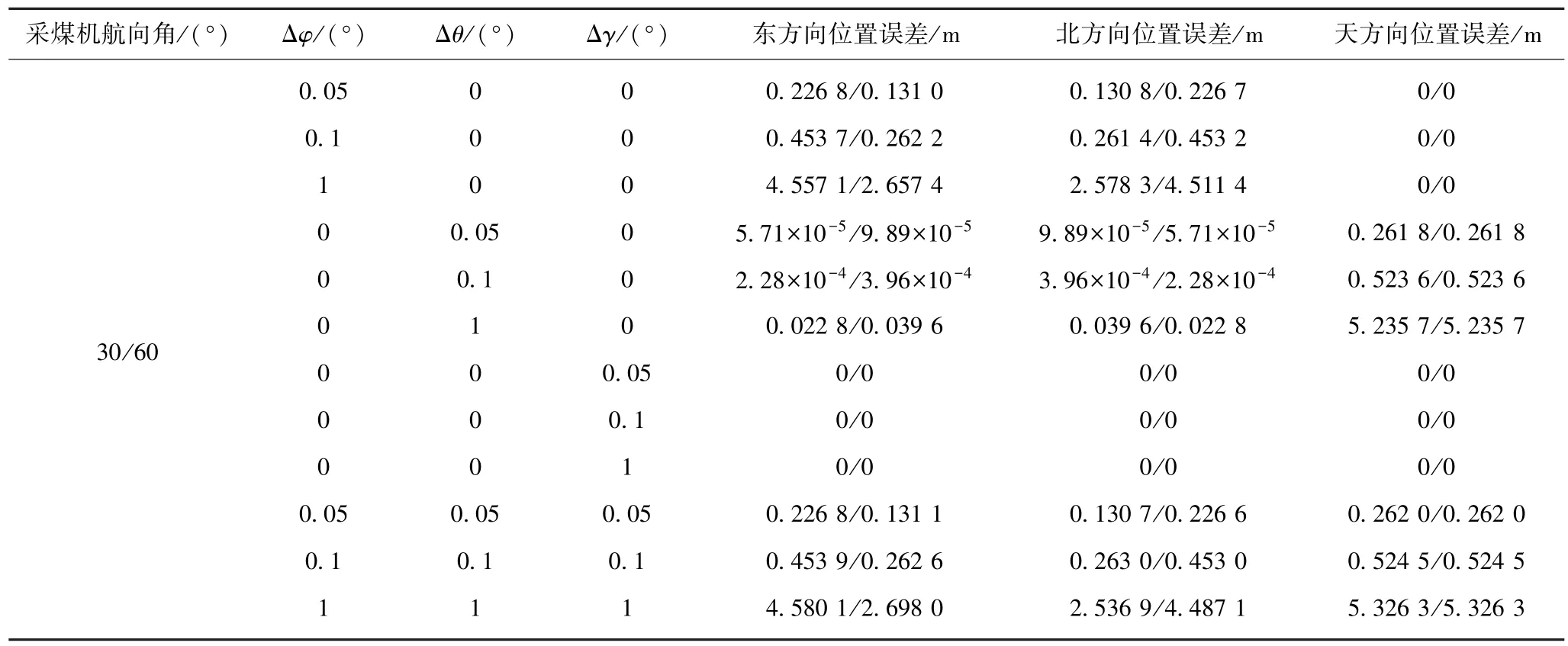
表2 仿真條件(2)下IMU不同安裝偏差條件下采煤機導航定位參數誤差項Table 2 Positioning errors of a shearer under different installation deviation according to condition (2)
圖5為仿真條件(3)下安裝偏差引起的采煤機東北方向定位誤差;圖6為仿真條件(3)下采煤機實際運行軌跡與安裝偏差影響下解算得到的采煤機運行軌跡的對比。根據圖5與圖6可知,安裝偏差引起的采煤機定位誤差隨著采煤機運行距離增大而增大,但采煤機在下一個截割過程反向運動時,其定位誤差逐漸減小。當采煤機完成一個截割循環時,定位誤差減小至0。
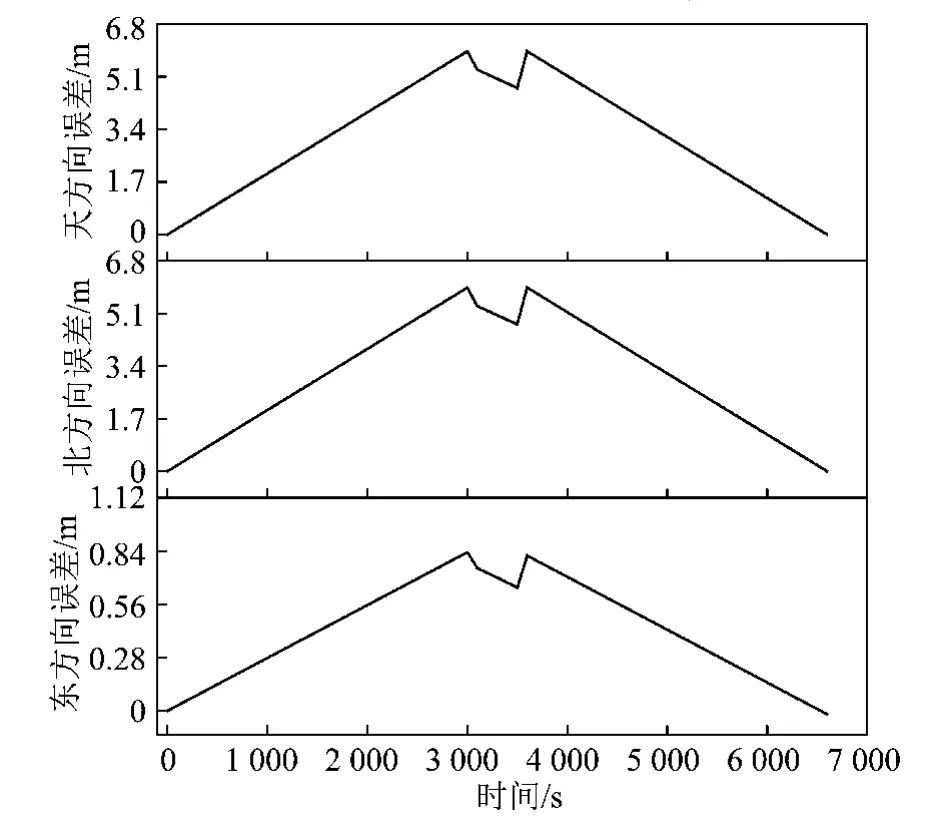
圖5 仿真條件(3)時安裝偏差引起的東北天方向定位誤差Fig.5 Position error in the direction of east,north and up induced by installation deviation according to condition (3)
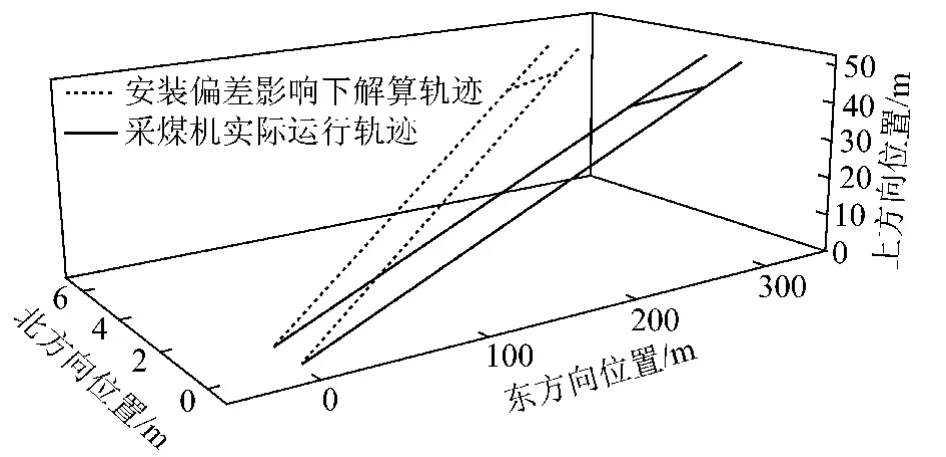
圖6 仿真條件(3)時實際運行軌跡與安裝偏差影響下解算運行軌跡Fig.6 Shearer real track and solution track with installation deviation according to condition (3)
4 結 論
(1)航向角安裝偏差和俯仰角安裝偏差對采煤機定位精度影響較大,橫滾角安裝偏差對采煤機定位精度影響較小。若只有橫滾角存在安裝偏差時,則不會對采煤機定位誤差帶來影響。
(2)安裝偏差較小時,安裝偏差引起的姿態誤差與安裝偏差近似相等。
(3)安裝偏差引起的采煤機定位誤差主要在高度方向和垂直于采煤機運動方向,俯仰角安裝偏差主要引起高度方向的定位誤差,航向角安裝偏差主要引起垂直于采煤機運動方向的定位誤差。
(4)安裝偏差引起的采煤機定位誤差隨著采煤機運行距離增大而增大,綜采工作面長度300 m時,各安裝偏差在1°以內,其引入的定位誤差在5.33 m以內。各安裝偏差在0.1°以內,其引入的定位誤差在0.523 m以內。
參考文獻:
[1]郝尚清,王世博,謝貴君,等.長壁綜采工作面采煤機定位定姿技術研究[J].工礦自動化,2014,40(6):21-25.
Hao Shangqing,Wang Shibo,Xie Guijun,et al.Research of determination technologies of position and attitude of shearer on long-wall fully mechanized coal mining face[J].Industry and Ming Automation,2014,40(6):21-25.
[2]呂文玉.國內外薄煤層開采技術和設備的現狀及其發展[J].中國礦業,2009,18(11):60-62.
Lü Wenyu.The present situation and future development of the world thin coal seam mining technology and equipment[J].China Mining Magazine,2009,18(11):60-62.
[3]祁和剛.薄煤層開采技術與成套裝備研究及應用[J].煤炭科學技術,2014,42(9):12-16.
Qi Hegang.Study and application of thin seam mining technology and complete equipment[J].Coal Science and Technology,2014, 42(9):12-16.
[4]李俊士,魏文艷.紅外線采煤機位置檢測裝置的研究[J].機械工程與自動化,2013,12(6):143-144.
Li Junshi,Wei Wenyan.Infrared shearer position detection device [J].Mechanical Engineering & Automation,2013,12 (6):143 -144.
[5]田 豐,秦 濤,劉華艷,等.煤礦井下線型無線傳感器網絡節點定位算法[J].煤炭學報,2010,35(10):1760-1764.
Tian Feng,Qin Tao,Liu Huayan,et al.Nodes localization algorithm for linear wireless sensor network in underground coal mine[J].Journal of China Coal Society,2010,35(10):1760-1764.
[6]楊 維,周嗣勇,喬 華.煤礦安全監測無線傳感器網絡節點定位技術[J].煤炭學報,2007,32(6):652-656.
Yang Wei,Zhou Siyong,Qiao Hua.Node localization in wireless sensor networks for coal mine security monitoring[J].Journal of China Coal Society,2007,32(6):652-656.
[7]王亦清,項止武,劉振堅,等.采煤機位置監測智能節點設計[J].煤礦機械,2010,31(12):11-13.
Wang Yiqing,Xiang Zhiwu,Liu Zhenjian,et al.Design of intelligent node of shearer position monitor[J].Coal Mine Machinery,2010, 31(12):11-13.
[8]Donna Lynne Anderson.Underground test results of a laser-based tram control system for a continuous miner[R].USBM,1992:8-16.
[9]Strickland W H,King R H.Characteristics of ultrasonic ranging sensors in an underground environment,9452[R].USBM,1993:8-40.
[10]張連昆,謝耀社,周德華,等.基于超聲波技術的采煤機位置監測系統[J].煤炭科學技術,2010,38(5):104-106.
Zhang Liankun,Xie Yaoshe,Zhou Dehua,et al.Position monitoring and measuring systemof coal shearer based on ultrasonic wave technology[J].Coal Science and Technology,2010,38(5): 104-106.
[11]William H Schiffbauer.Accurate navigation and control of continuous mining machines for coal mining[R].U.S.Dept of Health and Human Services,1997:8-37.
[12]Yuta S,Hajime Asama,Sebastian Thrum.Field and service robotice: Recent advances in research and applications [M ].Berlin:Springer,2006:469-476.
[13]Mark T Dunn,Jeremy P Thompson,Peter B Reid,et al.High accuracy inertial navigation for underground mining machinery[A].8th IEEE International Conference on Automation Science and Engineering[C].Seoul,Korea,2012:1179-1183.
[14]方新秋,何 杰,張 斌,等.無人工作面采煤機自主定位系統[J].西安科技大學學報,2008,28(2):349-353.
Fang Xinqiu,He Jie,Zhang Bin,et al.Self-positioning system of the shearer in unmanned workface[J].Journal of Xi’an University of Science and Technology,2008,28(2):349-353.
[15]張 斌,方新秋,鄒永洺.基于陀螺儀和里程計的無人工作面采煤機自主定位系統[J].礦山機械,2010,38(9):10-12
Zhang Bin,Fang Xinqiu,Zou Yongming.Auto-positioning system of shearer operating on manless working face based on gyroscope and odometer[J].Mining Processing Equipment,2010,38(9):10-12.
[16]樊啟高,李 威,王禹橋,等.一種采用捷聯慣導的采煤機動態定位方法[J].煤炭學報,2011,36(10):1758-1761.
Fan Qigao,Li Wei,Wang Yuqiao,et al.A shearer dynamic positioning method using strap down inertial navigation[J].Journal of China Coal Society,2011,36(10):1758-1761.
[17]樊啟高.綜采工作面“三機”控制中設備定位及任務協調研究[D].徐州:中國礦業大學,2013:13-14.
Fan Qigao.Study on equipments positioning and task coordination for three machines controlling on the mechanized mining face[D].Xuzhou:China University of Mining & Technology,2013:13-14.
Hao Shangqing,Li Ang,Wang Shibo,et al.Effects of shearer inertial navigation installation noncoincidence on shearer positioning error [J].Journal of China Coal Society,2015,40(8):1963-1968.doi:10.13225/ j.cnki.jccs.2014.1561
Effects of shearer inertial navigation installation noncoincidence on shearer positioning error
HAO Shang-qing1,2,3,LI Ang1,2,WANG Shi-bo1,2,GE Zhao-liang1,2,ZHANG Zhi-zhe1,2,GE Shi-rong1,2
(1.School of Mechanical and Electrical Engineering,China University of Mining & Technology,Xuzhou 221116,China;2.Intelligent Mining Equipment Collaborative Innovation Center,China University of Mining & Technology,Xuzhou 221116,China;3.TZ Coal Machinery Co.,Ltd.,Taiyuan 030032,China)
Abstract:An inertial positioning device was mounted directly on a shearer body in this study.The inertial navigation device coordinates represented a shearer coordinates in navigation solution.When there is installation noncoincidence, the inertial navigation device coordinates cannot represent the shearer coordinates.This will affect the positioning accuracy of the shearer.A positioning error model of a shearer was built according to the principle of dead reckoning.With the model,the relationship between installation noncoincidence and positioning error was derived.In installation noncoincidence,the heading deviation and pitch deviation have a greater impact on the shearer positioning error.In contrast, the roll deviation has a lower impact.Also,the error mainly concentrated on the height direction and the direction perpendicular to the movement of shearer.The constructed error model provides a theoretical basis to determine the installation accuracy requirements of inertial navigation device and to compensate the shearer positioning errors introduced by installation noncoincident.
Key words:shearer positioning;inertial navigation;installation noncoincidence;error model
通訊作者:王世博(1979—),男,河北新河人,副教授,博士。E-mail:wangshb@ cumt.edu.cn
作者簡介:郝尚清(1965—),男,山西應縣人,高級工程師,博士研究生。Tel:0351-7867266,E-mail:tztcfmi@ 163.com。
基金項目:國家高技術研究發展計劃(863)資助項目(2013AA06A411);中國礦業大學重大項目培育基金資助項目(2012ZDP09)
收稿日期:2014-11-18
中圖分類號:TD421.6
文獻標志碼:A
文章編號:0253-9993(2015)08-1963-06