基于線性內插算法的北斗VRS改正數精度分析
2015-02-08 03:40:16王兵浩呂志偉于曉東唐文杰
全球定位系統 2015年1期
王兵浩,呂志偉,石 鑫,于曉東,唐文杰
(信息工程大學導航與空天目標工程學院,河南鄭州450001)
基于線性內插算法的北斗VRS改正數精度分析
王兵浩,呂志偉,石 鑫,于曉東,唐文杰
(信息工程大學導航與空天目標工程學院,河南鄭州450001)
網絡RTK技術是一種高度集成的高精度定位技術。目前,基于GPS的網絡RTK技術研究比較深入,已經趨近成熟,但基于北斗的網絡RTK系統還不夠完善。本文基于長江口北斗網絡RTK試驗平臺的實測數據,對北斗和GPS的網絡RTK線性內插算法精度進行了對比,實驗證明線性內插算法同樣適用于北斗網絡RTK,能提供較高的精度。利用生成的虛擬參考站觀測量與流動站進行事后解算,得到厘米級精度。說明基于北斗系統的網絡RTK能夠提供與GPS相當的精度結果。
網絡RTK;內插算法;VRS;北斗
0 引 言
網絡RTK技術作為一種高度集成Internet技術、無線電通訊技術、計算機網絡技術和GNSS定位技術于一體的綜合定位系統,近年來有了長足的發展和應用[1]。由于其具有的分布均勻、高精度、可靠性強[2]等特點,這一技術被廣泛應用于地籍測量、工程測量和近海船舶管理等諸多場合。
網絡RTK的核心在于利用流動站周邊的參考站坐標精確已知這一約束條件確定基準站間的電離層、對流層等空間相關誤差項,利用流動站與基準站的空間關系通過特定的內插算法內插出虛擬參考站處的各項距離相關誤差項。經過RTCM編碼通過GSM、CDMA等方式發播給流動站用戶,用戶經過對收到的RTCM格式數據進行解碼,進而求解虛擬參考站與流動站用戶之間的超短基線,最終能夠快速獲得流動站厘米級精度坐標。
目前,基于GPS的網絡RTK技術發展已經比較成熟,但是基于北斗的網絡RTK系統目前尚在建設當中。近年來北斗系統的快速發展給北斗網絡RTK的建設提供了必要的技術支撐。本文將對基于北斗的網絡RTK虛擬參考站技術精度進行驗證。
1 數學模型
虛擬參考站技術(VRS技術)是網絡RTK技術中最為成熟、應用也最廣泛的技術[3]。主要思路為:通過解算基準站基線網絡,對流動站進行包裹,以流動站單點定位結果為基礎,在流動站周圍生成一個并不存在的虛擬參考站,通過內插得到虛擬參考站處空間相關改正數,利用內插出的改正數構造虛擬參考站處的觀測量。
用V表示虛擬參考站;A表示主參考站;上標:s為衛星標記;r表示參考衛星。則基準站間空間相關綜合誤差可以表示為[3]
當通過內插獲得主參考站與虛擬參考站間的綜合誤差后即可根據下式構造出虛擬參考站處的觀測值[3]:
2 線性內插法
當各參考站基線上的空間相關誤差確定后,就可以通過特定的內插算法計算虛擬參考站處的空間相關改正數。目前為止,國內外許多學者提出了多種利用VRS網絡數據生成誤差改正數的方法。主要有線性組合法、線性內插法、基于距離的線性內插法、條件平差法、最小二乘配置法等[3]。本文實驗采用的是線性內插法,該方法實現簡單、計算量小、效率較高,適用于基準站數量較少的情況。
線性內插法的原理[3-6]:利用基準站坐標和基準站間的改正數計算內插系數,進而內插出虛擬參考站處的改正數。具體算法如下:
當VRS網中有n(n≥3)個參考站時,其線性內插模型為[4]
式中:n代表主參考站;V表示參考站距離相關誤差(對流層延遲或電離層延遲)估值;ΔX和ΔY為其他參考站與主參考站的平面坐標值之差,a、b為內插系數,可通過最小二乘平差法求得。

式中:
其元素ωi通常由各參考站至主參考站的距離確定,常用表達形式有:ωi=1,ωi=1/di,ωi=1/d2i,.本文采用ωi=1,即將各參考站的影響差異忽略,將所有參考站做等權處理。
求出內插系數后,在網絡覆蓋區域內可采用二維線性模型內插距離相關誤差,有:

式中:Vun表示VRS改正數;ΔXun和ΔYun表示虛擬參考站與主參考站的平面坐標之差。
3 實驗設計
本次實驗分為流動站在基線網內和基線網外兩種情況,采用上海長江口CORS實驗平臺的數據。該實驗平臺一期已經完成了在橫沙島、雞骨礁、大戢山和蘆潮港四個站點的基準站及其附屬設施的建設,對長江口周邊地區構成了網狀覆蓋,該系統的建立,將在海事管理、船舶精密導航、海洋測繪、水上工程施工、水上建筑變形監測、海洋氣象等方面有著廣泛的應用前景。
該實驗平臺采用華測接收機,華信天線(HXGG486A),能夠接收GPS、北斗、GLONASS三個衛星系統數據。由于該實驗平臺目前僅有4個參考站,所以,無法通過上述方法對網內的點進行分析,故通過在網內已知點周圍設置虛擬參考站,內插虛擬參考站處的原始觀測量,作為基準站與已知點處的觀測數據聯立求解已知點坐標,與已知點真實坐標對比,對流動站在網內的情況進行驗證。流動站與四個基準站相對位置如圖1所示。
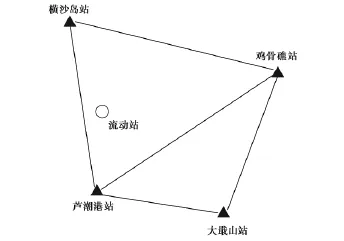
圖1 基準站與流動站位置關系
對流動站在網外的情況,首先將大戟山站作為流動站,利用其他3個站構成基線網絡,對大戟山站處的空間相關改正數進行內插。將大戟山站作為基準站,將其與另外三個站構成的基線進行求解,得到大戟山站相對于另外3個站的空間改正數,由于基線得到固定解后,模糊度正確估計,解基線求得的改正數可作為真值。將前兩步得到的改正數進行對比以實現改正數精度的對比分析[7]。
4 GPS/BDS網內內插結果分析
由于未在網內架設基準站,所以采取在網內已知點處采集靜態數據,進行事后解算的方式對精度進行驗證分析。網內流動站架設在圖1所示流動站處。
利用四個基準站觀測數據(2014年5月26日)內插出已知點附近的虛擬參考站觀測數據,并利用天寶后處理軟件TTC2.7(Trimble Total Control 2.7)和中海達公司HGO軟件(解算北斗數據)解算虛擬參考站與網內已知點構成的超短基線(GPS數據觀測時段2014年5月26日15:13:41-15:26:09;BDS觀測時段16:05:41-16:16:00),并將結果同已知點提供的平面坐標做比較,得到結果如圖2所示。
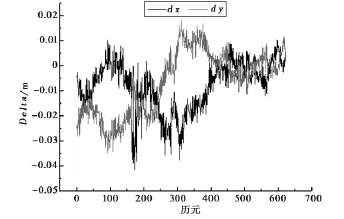
圖2 TTC解算網內GPS數據結果
通過網內實驗解算結果來看,采用本文提到的算法進行改正數內插構造觀測量,GPS系統能夠達到平面±5cm的精度,而對北斗系統的解算結果,能夠達到與GPS相當,甚至更好的精度,說明本文提到的內插算法可行,且同樣適用于北斗系統。
5 GPS/BDS網外內插結果分析
流動站在基線網外的情況,實驗采用上海長江口CORS實驗平臺2013年12月14日的數據。經過基線網的初始化,得到基線間的空間相關改正數與內插得到的改正數之間的差值如下(觀測時段2013年12月14日16:17:38-16:33:37)。
對于GPS系統,對L1和L2兩個頻點進行線性內插,得到的綜合誤差改正數與解基線得到的綜合誤差改正數的差值如圖3、圖4和圖5所示。
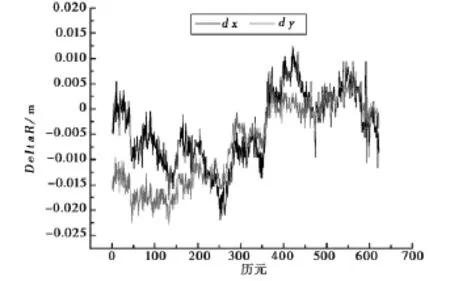
圖3 HGO解算網內北斗數據結果
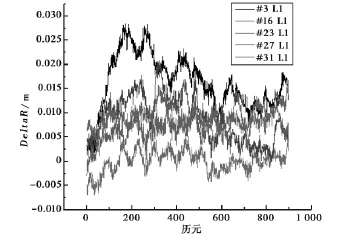
圖4 GPS L1改正數差值
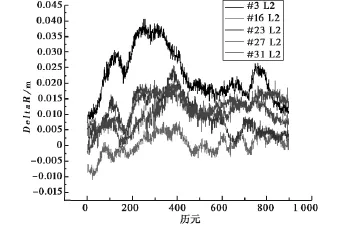
圖5 GPS L2改正數差值
兩者的綜合改正數之差均能保持在5cm以內,可以認為,利用這些改正數可以將空間相關誤差進行大幅修正,縮短流動站差分解算過程中獲得固定解的時間,提高定位精度。為了驗證通過本文算法構造的觀測量的有效性,使用TTC軟件對構造出的虛擬參考站觀測文件和流動站靜態觀測數據進行解算,求解虛擬參考站和流動站構成的超短基線,與已知基線做對比,得到結果如圖6所示。在平面方向,精度較高,大部分誤差在1cm以內,在高程方向有所浮動,但基本保持在5cm以內。章節4中的算例來說,精度較高的原因可能在于,本節選用的數據為基準站接收機測得的,觀測環境和數據質量相對于流動站接收機來更好。
同樣,對于北斗系統,采用同樣的方法,對B1、B3兩個頻點數據進行內插,得到的內插綜合改正數與解基線得到的改正數之差如圖7和圖8所示(觀測時段2013年12月14日16:25:00-16:29:10)。
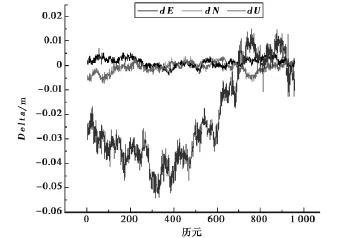
圖6 TTC解算GPS網外數據結果
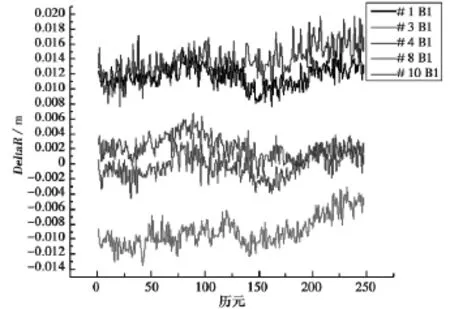
圖7 BDS B1改正數差值
圖中,1、3、4號衛星為GEO衛星,這3顆衛星的改正數差值相對于其他衛星較大,原因在于GEO衛星的軌道較高且與觀測站位置相對固定,軌道誤差較大。在后期的研究中將著重對這一影響進行定量的研究。
由于TTC2.7軟件版本較低,不具備處理北斗數據的能力,故采用中海達公司后處理軟件HGO求解北斗虛擬參考站與大戢山站構成的超短基線得到如圖9所示的結果。
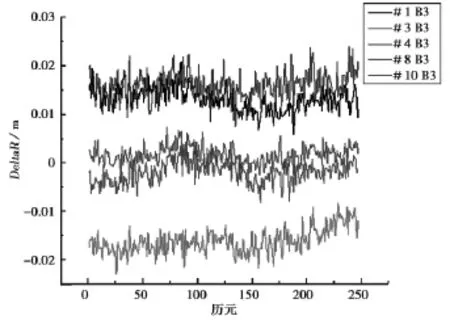
圖8 BDS B3改正數差值

圖9 HGO解算BDS網外數據結果
6 結束語
近年來北斗系統迅猛發展,北斗參考站開始大量建設,北斗網絡RTK系統對于充分挖掘和利用北斗參考站豐富的數據資源、推動北斗衛星系統在各行業的應用具有極大的影響力,同時也將產生巨大的社會效益和經濟效益。通過實驗分析,可見線性內插法適用于VRS模式網絡RTK數據生成,對北斗數據的處理也能達到較好的精度,為北斗網絡RTK建設奠定良好基礎。
[1]朱 超,高成發,趙 毅,等.基于VRS的GPS虛擬相位觀測值生成算法研究[J].大地測量與地球動力學,2009(1):123-126,131.
[2]潘樹國,王 慶,毛 薇.基于VRS的GPS網絡RTK差分改正方法[J].中國慣性技術學報,2008(3):326-329.
[3]張 鋒.基于多參考站網絡的VRS算法研究與實現[D].鄭州:解放軍信息工程大學,2007.
[4]張成軍.虛擬參考站誤差分析與算法研究[D].鄭州:解放軍信息工程大學,2005.
[5]柳錦森.GPS網絡RTK的VRS算法研究[D].合肥:合肥工業大學,2009.
[6]謝建濤,郝金明,邱 璇,等.GPS/VRS對流層延遲誤差內插模型研究[J].測繪與空間地理信息,2013(2):139-141.
[7]柯福陽,王 慶,潘樹國,等.VRS網絡RTK關鍵算法與技術及精度分析[J].宇航學報,2009(3):1287-1292.
An analysis of BDS VRS Corrections Based on Linear Interpolation Algorithm
WANG Binghao,LüZhiwei,SHI Xin,YU Xiaodong,TANG Wenjie
(College of Navigation and Aerospace Engineering,Information Engineering University,Zhengzhou450001,China)
The network RTK technology is a highly integrated positioning technology with high precision.At present,the network RTK technology research based on the GPS is reaching maturity,but the BDS network RTK system is not perfect enough.This article is based on the actual measurements of the Yangtze Estuary BDS Network RTK Testing Platform.With comparing of the BDS and GPS network RTK accuracy based on linear interpolation algorithm,the experiment proves that the algorithm mentioned in this article works well for BDS network RTK with cm-level accuracy.The post processing experiments also obtain considerable accuracy.
Network RTK;linear interpolation algorithm;VRS;BDS
P228.4
A
1008-9268(2015)01-0027-05
10.13442/j.gnss.1008-9268.2015.01.006
王兵浩(1989-),男,河北衡水人,碩士生,主要從事網絡RTK、GNSS融合相對定位相關方面研究。
呂志偉(1974-),男,江西贛州人,副教授,主要從事衛星精密定位方向的研究。
石 鑫(1990-),男,四川成都人,碩士生,主要從事網絡RTK相關算法方面的研究。
于曉東(1990-),男,河北邯鄲人,碩士生,主要從事網絡RTK相關算法的研究。
唐文杰(1991-),男,安徽宣城人,碩士生,主要從事網絡RTK及行人導航方面研究。
更 正
2014-10-25
聯系人:王兵浩E-mail:wangbinghao7@126.com
《全球定位系統》期刊2014年第39卷第6期第94頁作者候宗祥更正為侯宗祥。
