利用一機多天線接收機估計短基線多路徑的方法
2015-02-08 03:40:15夏俊晨張千千華一飛
全球定位系統 2015年1期
曾 志,宋 樂,夏俊晨,張千千,華一飛
(1.華東師范大學信息科學技術學院通信工程系,上海200241;2.空間信息和定位導航上海高校工程中心,上海200241)
利用一機多天線接收機估計短基線多路徑的方法
曾 志1,2,宋 樂1,2,夏俊晨1,2,張千千1,2,華一飛1,2
(1.華東師范大學信息科學技術學院通信工程系,上海200241;2.空間信息和定位導航上海高校工程中心,上海200241)
現代高精度GNSS定位技術應用日益廣泛,采用差分技術可以消除大部分誤差。而多路徑誤差作為測量的主要誤差源之一,依賴于接收機天線周圍環境和天線的幾何反射特征,由于其隨機性和復雜性,不能通過差分直接削弱或消除。而多路徑效應的存在嚴重影響了測量的精度,甚至會導致信號失鎖。對通過共用一個時鐘多個天線的衛星接收機系統估計多路徑提出了新型方法,利用短基線的單差技術和數學模型找到衛星高度角和方位角與多路徑之間的關系,建立了對多路徑進行估計的短基線模型。通過實驗數據的處理得到了比較滿意的結果,并且驗證了短基線模型的正確性和實用性。
多路徑;共用時鐘;多天線;短基線
0 引 言
GPS測量誤差主要來源于衛星部分的星歷誤差、鐘誤差、相對論效應誤差;信號傳播過程中的電離層、對流層和多路徑效應誤差;信號接收的鐘誤差、位置誤差、天線相位中心變化誤差等;隨著多數誤差能夠通過模型和差分得到消除或減弱,但是多路徑效應在基線兩端不具有相關性[1],使得多徑誤差成為了主要的誤差來源,因此如何削弱多路徑誤差成為了高精度GPS測量的主要問題[2].
多路徑效應形成的主要原因是由于衛星信號在傳播到衛星接收機之前受到周圍環境的影響使得衛星接收機接收到的信號不是衛星直射的信號而是衛星直射信號和衛星信號經過周圍障礙物反射之后的合成信號,從而影響定位精度。
現階段減弱多路徑的方法大體分為兩類:硬件抑制和數據后處理方法[2]。硬件抑制方法分為對天線和對接收機的改良。天線的改良主要通過增加扼流圈、使用右旋圓極化天線、利用空間幾何關系和反射原理使用天線陣等方法減弱多路徑影響。接收機的改良主要有多路徑估計延遲鎖定環技術(MEDLL)[3]、窄相關技術[4]。MEDLL技術是通過最大似然估計,估計出多路徑和直射信號的參數,將直射信號從含有多路徑的合成信號中分離出來以達到減弱多路徑的目的。窄相關技術是利用可變長度的相關器,減少相關長度,使得系統跟蹤環誤差波動變小,從而有效提高抗干擾能力。
數據的后處理主要有利用固定一點觀測的衛星周日重復性,通過確定最優重復時間,利用已有的觀測數據的多路徑誤差改正后續數據,以達到減弱多路徑目的的恒星日濾波[5]。根據多路徑效應表現出一定的周期性變化,利用小波分析使用不同截止頻率的濾波器在不同尺度上分析信號,將信號分解為近似信號和細節成分,從而從多路徑信號提取出小波分析[6]。利用信號的信噪比SNR,通過頻率的特征對信噪比進行分析,將多路徑從復合信號提取出來的信噪比技術[7]。根據衛星,反射面,接收機天線的幾何關系和特征,利用射線追蹤法找到多路徑信號反射點的位置估計多路徑誤差,從而達到消除多路徑的目的射線追蹤法等技術[8]。但是這些技術都無法有效的消除多路誤差對接收機的影響,而且數據后處理的方式無法做到實時處理,無法建立實時改正模型,所以需要進一步對多路徑消除進行研究。
傳統的短基線用兩臺接收機,為了消除接收機鐘差必須用雙差觀測。雙差的結果只能觀測到兩顆衛星信號多路徑的差分,得不到單顆衛星的多路徑。而通過時鐘同步多天線接收機不僅精度高,而且能得到單顆衛星的多路徑信號,該短基線模型不僅消除了其他方法的局限性,并且去掉了對衛星的依賴性,是一個可以用于實時改正的模型。
1 一般原理和短基線模型
1.1 載波信號多路徑特征和模型
造成載波信號多路徑誤差的原因主要是由于衛星接收機接收到的是衛星直射信號和經過反射的衛星信號的合成信號,圖1所示為衛星接收機接收的衛星信號。
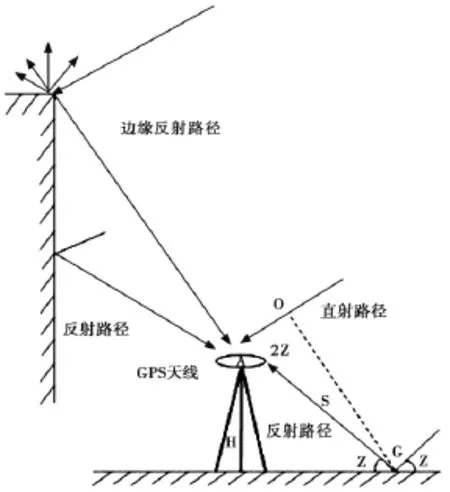
圖1 衛星接收機接收的衛星信號
衛星接收機接收來自四面八方的多路徑信號和直射信號的合成信號。
在載波相位測量中,設直射信號為

式中:A為信號電壓;φg為載波的角頻率。
設反射信號的數字表達式為

式中:α為反射信號的衰減系數;η為反射信號比直射信號多走的光程所造成的相位延遲。
反射信號和直接信號疊加后被接收機天線接收,所以天線實際接收的信號為

其中,多路徑耦合帶來的相位畸變為Δφm=tan-1,振幅畸變因子為.
給定α對Δφm公式中的η求極值,得到cosη=-α時相位畸變取極值Δφmax=±arcsin(α),當α=1時最大極值為90o,即最多產生1/4的波長距離誤差。若采用L1進行觀測,則最多會產生5cm左右的誤差。
1.2 短基線模型
GPS接收機天線輸出的載波相位可以表示為

式中:τg,τr,τs,τa,τi分別代表幾何延遲、接收機鐘差、衛星鐘差、大氣延遲、和電離層延遲;φm,φpcv,φpw,φ0,N分別代表多路徑延遲、天線相位變化、相位纏繞、相位初始值和整周相位模糊度。
在使用時鐘同步一機雙天線接收機的情況下,用兩個天線的觀測相位差分作觀測量,接收機鐘差和衛星鐘差都被消去,同時相位纏繞和衛星發射天線相位變化也被消去。在短基線的情況下,大氣和電離層延遲也基本被消去。這時,臺站的幾何延遲成為基線的幾何延遲,接收機天線相位變化和多路徑也變成了差分值。式(4)表達為

式中:Δφobs代表雙天線測定的載波相位差;Δφg為基線幾何延遲對應的相位;Δφm為基線多路徑造成的載波相位畸變量;Δφpcv為接收機天線相位變化的差分;ΔN為整周模糊度差,Δφ0有兩部分,第一部分代表雙天線的初始相位差,因為不能肯定接收機給這兩個天線的初始相位一定是相同的,而這部分可以合并到相位模糊度項中,使其不再為整數;第二部分是由于兩天線的電纜線長度不一樣帶來的時延差對應的相位,它在所有時刻對所有衛星是一個常量。估計基線多路徑分布模型時,兩個天線必須安置成相同姿態,這時Δφpcv為0,這時的觀測模型為

觀測方程仍然為

這時式中估計參數為基線多路徑格點分布模型(全程參數)和模糊度(每顆衛星一個模糊度參數)。
式(3)中相位和振幅畸變因子公式中畸變因子僅和空中的格點位置有關,不同的格點對應不同的α和η,和直射信號的振幅和相位無關。多路徑和臺站周圍的環境有關,特別是和反射體的幾何形狀和位置有關。在大多數的觀測中,幾何環境可認為不變,這時多路徑效應和時間無關。
根據上述性質和假定,不需要作非線性擬合求α和η,可以直接擬合空間各格點的基線多路徑參數Δφ(θ,λ).也就是本文所提到的短基線估計多路徑模型。
2 實際數據處理
2.1 實驗數據的處理和分析
實驗地點為華東師范大學閔行校區后勤樓四樓房頂,天線位置固定,周圍的建筑物高度高且多,因此會接收到經過反射的多路徑信號,由于兩個天線的位置固定且周圍的建筑物等在實驗期間沒有發生變動,滿足短基線模型的基本要求,對連續觀測三天的數據進行處理,本文中采用的新型接收機采用的是Trimble BD982接收機,其最大的特點就是一個接收機上的兩個天線共用一個時鐘,經過一次差分就已經達到普通接機收雙差的結果。時鐘同步多天線接收機不僅精度高,而且得到單顆衛星的多路徑信號,使得構建短基線模型成為可能。也是短基線模型能夠實現的關鍵。
觀測量的單位是周(cycle),基線多路徑參數Δφ(θ,λ)的單位是mm,λ為載波波長.
圖2為實驗衛星接收機所能夠接收到信號的衛星的在天空上方的軌跡圖,本次實驗中采用了31顆GPS衛星,衛星編號是G1-G32,其中不包含編號G30的衛星,利用的是L1波段進行多路徑估計。從圖3中可以看出部分區域衛星是不經過的所以也就沒有衛星數據,由于低高度角時接收機無法接收到衛星信號所以低高度角也沒有數據,本次實驗的高度截止角為5°.實驗數據來源2013.11.08-2013.11.10連續三天的觀測數據。
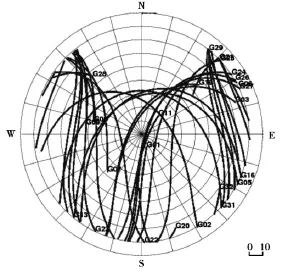
圖2 衛星軌跡圖
表1示出的是2013年11月8號通過短基線模型定量計算出不同天空格點處對應的不同的多路徑誤差值和置信區間的Sigma值,Sigma值越小表示該多路徑估計值越可靠,表1是部分格點的多路徑值。本文中采用的格點大小是5°×5°.很明顯的看出在高度角較高時多路徑誤差較小,當高度角較低時多路徑誤差較大。這和實際情況也比較相吻合,當高度角較高時衛星接收機和衛星之間的遮擋物較少,衛星接收機接收到的信號絕大部分是衛星的直射信號,而高度較低時衛星接收機與衛星之間的遮擋物增多,這時接收機接收到的信號中經過障礙物反射的成分很大,因此多路徑誤差較大。為了更直觀的觀察短基線多路徑誤差,圖3為連續三天多路徑誤差半天球分布圖和11月9日和11月10日多路徑誤差差值半天球分布圖,其中最大的圓表示高度角為0°,中心處表示高度角為90°,方位角沿順時針方向依次增加。網格格點為5°×5°.從前面三張圖可以很明顯的看到這連續三天的多路徑誤差半天球分布圖的相似性極高,這也從直觀上看出當衛星接收機固定和其周圍的環境不發生劇烈變化的時候其多路徑在一定時間內是一個定值。圖3中的最后一張圖是為了比較連續兩天的多路徑誤差的具體差別,將其中連續兩天的多路徑誤差相減所得到的多路徑誤差半球天空分布圖,從圖中可以看出絕大部分誤差差值都很小,直觀的反映出了多路徑誤差的重復性。
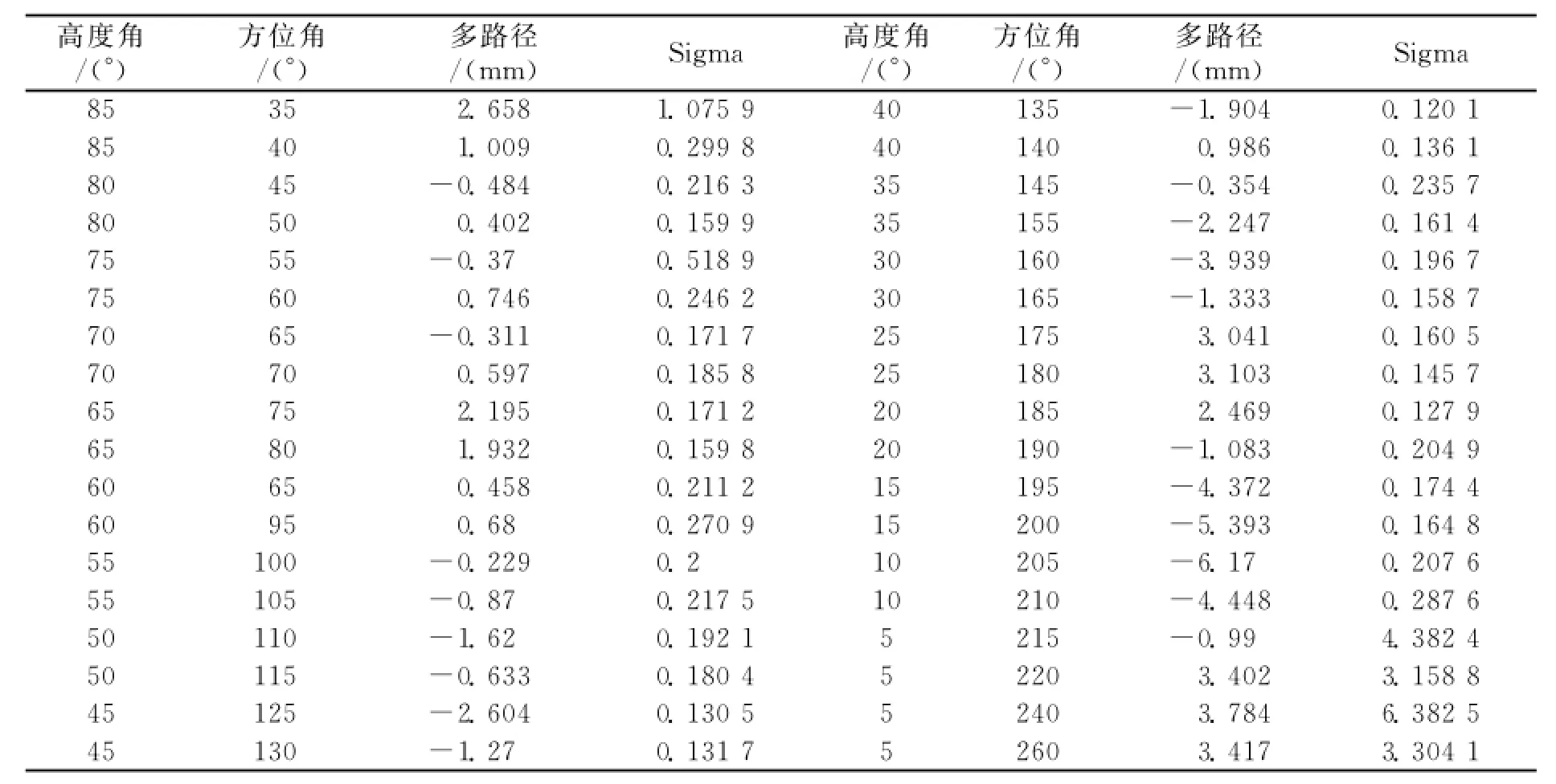
表1 2013年11月8日不同的天空格點對應的多路徑誤差和sigma值

圖3 多路徑誤差半天球分布圖
2.2 正確性和可行性驗證
如表2所示將連續三天沒有采用短基線模型的觀測數據的均方根誤差(RMES)和采用的了短基線模型后的觀測數據均方根誤差對比,可以看到未使用短基線模型三天的平均均方根誤差為3.683 0,使用短基線模型的平均均方根誤差為2.042 1,使用短基線模型后能改善以前44%左右的多路徑誤差。有效的減少了多路徑誤差對于定位精度的影響。也證明了短基線模型的可行性,能夠有效的消除多路徑誤差。
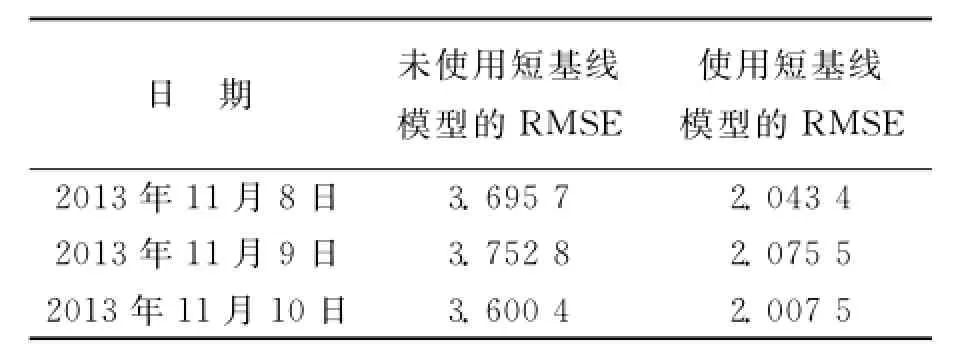
表2 連續三天的觀測數據均方根誤差
3 結束語
通過實際的實驗數據的具體分析可以得到以下結論:
1)短基線模型能夠有效的定量估計出多路徑誤差,短基線模型的正確性和可靠性得到了驗證,并且短基線模型所采用的一機多天線系統的定位精度高。
2)在靜態環境下可以利用短基線多路徑信號與衛星高度角和方位角的關系對多路徑進行削弱,從而使得衛星的定位精度得到改善。短基線模型克服了其他消除多路徑方法的局限性,去掉了對衛星的依賴性,是一個真正可以用于實時改正的模型。
致謝:感謝華東師范大學董大南教授的悉心指導。
[1]戴吾蛟,丁曉利,朱建軍.GPS動態變形測量中的多路徑效應特征研究[J].大地測量與地球動力學,2008,28(1):65-70.
[2]范曉燕,周乾.GPS測量中多路徑效應研究綜述[J].工程地球物理學報,2010,7(3):382-386.
[3]TOWNSEND B R,VAN DIERENDONCK K J,FENTON P C,et al.Performance evaluation of the multipath estimating delay lock loop[J].Journal of Navigation,1995,48(3):508-514.
[4]FENTON P,FALKENBERG B FORD T,et al.NovAtel s GPS receiver-the high performance OEM sensor of the future[C]//Proceedings of ION GPS-91:Fourth International Technical Meeting of the Satellite Division of The Institute of Navigation.Albuquer que,1991:49-58
[5]BOCK Y,PRAWIRODIRDJO L,MELBOUME T I.Detection of arbitrarily large dynamic ground motions with a dense high-rate GPS network[J].Geophysical Research Letters,2004,Vol 31,L06604.doi:10.1029/2003GL019150.
[6]鐘 萍,丁曉利,鄭大偉,等.一種基于交叉證認技術的自適應小波變換及其在削減GPS多路徑誤差中的作用[J].測繪學報,2007,36(3):279-285.
[7]張 波,黃勁松,蘇林.利用信噪比削弱GPS多路徑效應的研究[J].測繪科學,2003,28(3):32-35.
[8]VAN TRIER J,SYMES W.Upwind finite-difference calculation of traveltimes[J].Geophysics,1991(56):812-821.
我國代表團赴維也納參加聯合國全球衛星導航系統國際委員會第十次大會預備會等系列會議
2015年2月9日,聯合國全球衛星導航系統國際委員會(ICG)第十屆大會預備會在奧地利首都維也納召開。中國衛星導航系統管理辦公室、中國科學院、北京航空航天大學等單位代表和專家參加了會議。來自聯合國外空司、美國、俄羅斯、意大利、日本等國家,亞太空間合作組織、歐洲空間政策研究所、空間一代咨詢委員會以及聯合國空間科技教育中心等國際和區域組織參加了會議。
本次預備會,聽取了歐盟關于第九屆大會及供應商論壇有關情況和成果的報告,回顧了各工作組的提案與報告,并圍繞聯合國外空司發起的新一輪ICG手冊編制工作進行了協調,該手冊是ICG成立十周年系列慶祝活動之一。同時,聽取了美國關于第十屆大會的籌備進展,協調了年度有關活動安排。會議明確,第二次預備會擬于2015年6月8日在維也納召開。
預備會后,各系統供應商代表共同舉行了第十四屆供應商論壇預備會,回顧了上屆論壇會議情況和成果,協調了有關安排,明確供應商論壇會議將于6月8日在維也納召開舉行。其間,聯合國外空司表示,希望各供應商對如何加強ICG信息中心和信息門戶網站建設進一步獻言獻策。會議還討論了關于空間一代咨詢委員會申請成為ICG觀察員的有關事宜。
2月10日,中方代表還參加了同期舉行的聯合國和平利用外層空間委員會科技小組會議,在全球衛星導航系統議題環節中,中國衛星導航系統管理辦公室黃喬華副主任作了北斗系統發展情況一般性發言,中方專家作了北斗系統技術報告,從系統建設、應用推廣、國際合作等方面介紹了系統發展成果。聯合國外空司、國際電聯、美國、俄羅斯、歐盟、巴西、加拿大等代表都在該環節進行了報告和發言,體現了越來越多的國家、機構和國際組織致力于衛星導航服務和應用,并對確保衛星導航廣泛可靠應用保持高度關注。
(來源北斗網)
The Methond of Estimating the Short Baseline Multipath Error by Using Multi-Antennas Receiver
ZENG Zhi1,2,SONG Le1,2,XIA Junchen1,2,ZHANG Qianqian1,2,HUA Yifei1,2
(1.East China Normal University,School of Information Science Technology,Department of Telecommunication,Shanghai 200241,China;2.Engineering Center of SHMEC for Space Information and GNSS,Shanghai 200241,China)
The high precision modern GNSS technology is increasing widely used.It can remove most of the errors by adopting the differential technology and the corrected-model.Multipath error is the major error of measurement.As it’s randomness and complexity which depend on the surroundings of receivers’antennas and the geometric characteristics of reflection.It can’t be weakened or eliminated by using the differential technology directly.The multipath error seriously affected the precision of measurement and can even cause the lock-lose of the signal.Proposing a new method to estimate the multipath error by using a satellite receiver with multi antennas which share one clock.To set up the short baseline multipath model for evaluating the multipath error by using the single difference technology on short baseline and math model to find the relationship between the multipath error and the satellites’elevation and azimuth,Obtained a satisfied result with the comparison of the real experiment data which conclude that the correctness and practicability of the short baseline multipath model.
Multipath;share clock;multi-antennas;short baseline
P228.4
A
1008-9268(2015)01-0017-05
10.13442/j.gnss.1008-9268.2015.01.004
曾 志(1988-),男,碩士生,主要從事高精度衛星定位的系統分析和應用研究。
宋 樂(1989-),女,碩士生,主要從事高精度衛星定位的系統分析和應用研究。
夏俊晨(1990-),男,碩士生,主要從事高精度衛星定位的系統分析和應用研究。
張千千(1988-),女,碩士生,主要從事高精度衛星定位的系統分析和應用研究。
華一飛(1990-),男,碩士生,主要從事高精度衛星定位的系統分析和應用研究。
2014-11-18
國家自然科學基金(批準號:61372086,41201380);上海市科委科技創新行動重大項目(編號:13411500300)
聯系人:曾志E-mail:zengzhi6222@126.com
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
鴨綠江(2021年35期)2021-04-19 12:24:18
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
數學物理學報(2020年2期)2020-06-02 11:29:24
中國生殖健康(2019年3期)2019-02-01 06:12:26
光學精密工程(2016年6期)2016-11-07 09:07:19
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
核科學與工程(2015年4期)2015-09-26 11:59:03
