基于無線傳輸的工業遠程遙控器設計
2015-01-29 08:35:34安徽師范大學物理與電子信息學院江錦洲李立林
電子世界 2015年15期
安徽師范大學物理與電子信息學院 江錦洲 李立林 李 靜 金 強
基于無線傳輸的工業遠程遙控器設計
安徽師范大學物理與電子信息學院 江錦洲 李立林 李 靜 金 強
針對工程機械信息化發展的新趨勢,本文主要設計一種專門用來控制工程機械或工業設備的遠程無線遙控器。為確保通信的穩定可靠,無線工業遙控器采用具有反饋檢測功能的雙MCU控制,通信頻率分別采用433MHz和2.4GHz雙頻段無線通信的冗余設計。遙控器由發射器與接收器組成,兩者之間通過射頻模塊進行無線通信。無線遙控支持“點動”和“翻轉”兩種控制方式,模擬實際工業控制方式。利用硬件FEC功能以及采用軟件交織卷積編碼方式,提供通信穩定性,通信協議中加入實時在線功能,定時進行“心跳包”的發送,確保實時連接。
工業遙控器;通信穩定性;雙MCU;交織卷及編碼
隨著科學技術的發展,工程機械設備的使用逐步的取代了人力在工程項目中的勞動,但有些大型機械的運轉還是得靠人為操作,而且往往都是在危險的環境中。所以人們希望在更安全的地點操作機器的正常運轉。
工業遠程遙控器是在傳統的有線遙控基礎上改進而來,但是不同于有線遙控方式,無線工業遙控器采用兩個微控制器協調配合控制,可靠采集操作指令及狀態信息,兩個CPU之間相互監測,在硬件結構上保證系統的可靠性。相比傳統的手工操作,無線控制能節省人力資源、提高工作效率、改善工作環境,更減少了設備的人為損壞和維修成本。因此,工業無線遙控器將是未來工業發展的一個新趨勢。
1 系統功能簡介
工業遠程遙控器按采集和處理數據的流程可分為兩部分:發射器與接收器。發射器用來采集按鍵、搖桿等指令或狀態信息,然后通過射頻模塊發送出去。接收器主要用來接收發射器發送的指令信息,并將指令信息通過相應的總線接口傳輸到工程機械,實現對工程機械的遠程控制。在此次設計中,采用無線控制與線纜控制雙重控制方式,確保遙控器的可靠性。遙控器在實際工作過程中,涉及到了數據采集、狀態采集、無線通信、CAN通信、串口通信及GPS定位等內容,因此先設計相應的子程序,最后通過主函數調用和中斷服務程序的執行,實現遙控器對工程機械的控制。
系統整體結構如圖1所示,其中發射器屬于便攜式設備,由操作人員控制,向接收器發送控制指令,指令通過無線發射裝置傳輸到接收器。接收器安裝在工程機械(如混凝土泵車、工業行車、隨車起重機等)上,當接收器接收的指令后作出相應的動作。
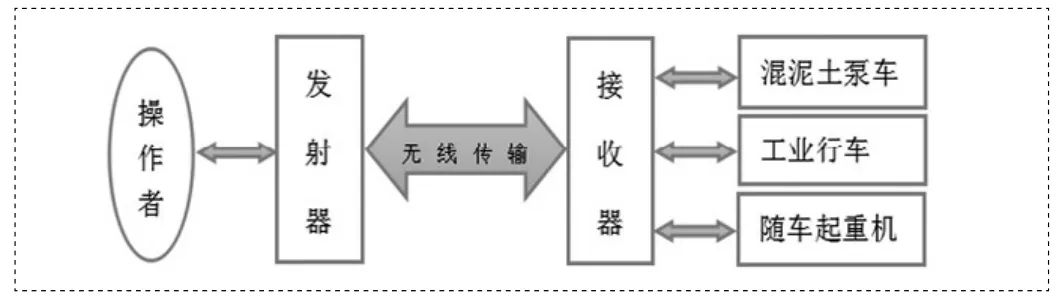
圖1 系統整體結構
2 系統硬件結構
系統的硬件電路是整個系統運行的基礎,主要由電源模、微控制器模塊、射頻通信模塊、GPS定位模塊、LCD顯示模塊組成。結構圖如圖2所示。

圖2 遙控器總體框圖
2.1 電源電路設計
本文中遙控器采用鋰電池供電,鋰電池的正常電壓為+3.7V到+4.2V,而遙控器在備用線纜控制方式下,要用+24V的車載蓄電池供電,另外車載蓄電池還可以給鋰電池充電。根據各芯片的電壓要求,微控制器及其外圍器件要用到的電壓有+5V和+3.3V。故設計+24V轉+5V、+5V轉+3V及鋰電池充電電路。各模塊電路如圖3所示。
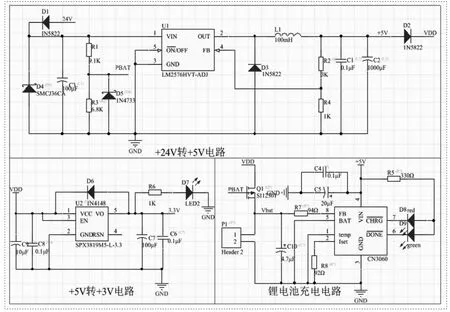
圖3 電源模塊
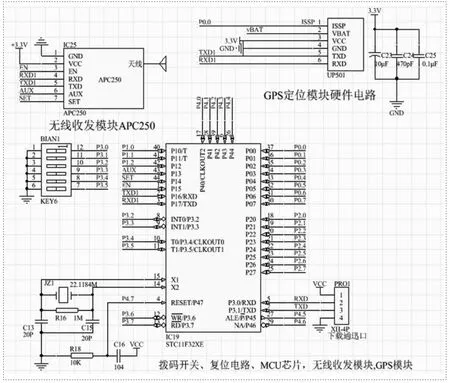
圖4 微控制器模塊及部分外圍電路
2.2 微控制器模塊設計
微控制器模塊及部分外圍電路如圖4所示。本文中微控制器模塊采用STC11F08XE單片機。該系列單片機指令代碼完全兼容傳統的8051,但速度快8-12倍。內部集成高可靠復位電路,適用高速通信、智能控制、強干擾場合。
2.3 其他模塊
射頻通信模塊、GPS定位模塊、LCD顯示模塊技術已非常成熟,沒有必要重復設計,故直接采用市場上的成品模塊。
3 系統軟件設計
遙控器系統能夠穩定可靠的工作,不僅需要合理的硬件設計,還要有功能完善的軟件支撐。以下是程序要完成的工作。
(1)MCU芯片初始化。包括時鐘、UART、定時器等內部資源的初始化。
(2)數據采集程序設計。包括ADC初始化,多路開關檢測芯片的初始化及按鍵采集程序設計。
(3)無線通信程序設計。包括對SI4432和CC2500芯片寄存器初始化、通信協議定義以及數據包收發程序設計。
(4)CAN總線程序設計。線纜控制與無線控制實現的功能基本相同,主要完成協議幀的傳輸。
(5)串口程序設計。主要實現發射器或接收器內部數據的傳輸,如上位機、GPS模塊及顯示屏的數據傳輸,雙CPU之間的數據交互等。
(6)GPS定位程序設計。通過讀取GPS模塊的信息,對GPS內容進行解析,獲取到發射器與接收器之間的距離。
4 結論
本文設計了一種基于STC11F08XE新型實用的工業無線遙控器,可以取代傳統的由工作人員在封閉的駕駛室操作工程機械的方式,對大型機械工作進行遠程安全遙控。對于現在大型工程作業的安全意識要求越來越嚴格的背景下,該遙控器不僅能夠實現對機械的精確操控,而且相比于傳統的遙控器更加安全可靠,具有實用性強,便于攜帶等優點。
[1]宋效正,劉璐,黨安紅,湯俊雄.高碼率無線光通信交織卷積編碼新方案研究[J].通信學報,2007,10.
[2]宋丹丹.無線工業遙控器的研究與設計[D].南京理工大學,2013,03.
[3]呂堃,張利芳.基于無線數傳模塊的工業遙控器的設計[J].工業控制計算機,2004,08.
[4]項小淳.ISM頻段通信模塊設計[D].電子科技大學,2009.
[5]辛明壽.RS碼在車載無線通信中的應用[D].吉林大學,2006.
[6]劉付川.工程機械遙控裝置的設計與實現[D].南京理工大學,2014.
[7]STC11/10XX系列單片機器件手冊[EB/OL].2015,4:201-229.
江錦洲(1993—),男,大學本科,現就讀于安徽師范大學物理與電子信息學院,主要研究方向為電子信息。
猜你喜歡
商品與質量(2021年43期)2022-01-18 05:27:58
銅業工程(2021年2期)2021-06-27 10:36:24
銅業工程(2021年1期)2021-04-23 01:45:08
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
表面工程與再制造(2019年1期)2019-12-04 15:10:07
汽車觀察(2018年9期)2018-10-23 05:46:44
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
