基于遺傳算法的分揀機器人最優(yōu)路徑規(guī)劃
2015-01-27 05:04:35
自動化與儀表 2015年11期
(華南理工大學 聚合物新型成型裝備國家工程研究中心 聚合物成型加工工程教育部重點實驗室,廣州 510640)
近年來,工業(yè)機器人技術(shù)發(fā)展迅速,廣泛應(yīng)用于工業(yè)生產(chǎn)的各個方面,具有較大的發(fā)展空間[1-2]。機器人抓取技術(shù)是指工業(yè)生產(chǎn)中實現(xiàn)不同物體的分揀,并且將其快速準確地放在指定位置。如果讓工人長時間從事重復的分揀工作易產(chǎn)生疲勞且效率不高。因此,采用機器人完成分揀工作不僅可以提高工作效率和準確性,更能節(jié)省人力資源成本,增加工廠的效益。機器人分揀物體的路徑優(yōu)化問題是生產(chǎn)中常見的實際難題,如果路徑設(shè)計不合理,將會增加系統(tǒng)的運行時間。分揀順序優(yōu)化是一個組合優(yōu)化問題,而組合優(yōu)化問題是一個復雜的問題,得到了廣泛的研究[3-7],但對并聯(lián)機器人路徑優(yōu)化的研究還比較少。本文運用遺傳算法對多約束條件的并聯(lián)機器人分揀順序進行了仿真研究并在貝加萊公司最新的Tripod機器人上進行實驗,驗證了該方法的有效性。
1 問題描述
Tripod機器人是貝加萊工業(yè)自動化有限公司和奧地利HTL Wels大學共同設(shè)計的四軸并行機器人,具有3個機械手臂。在3臺相同電機的配合控制下,工具中心可以在X,Y,Z工作空間中進行平移運動,并通過一個步進電機實現(xiàn)旋轉(zhuǎn)。
模擬工件分揀平臺如圖1所示,由外圓環(huán)和內(nèi)圓圈2部分組成。外圓環(huán)上隨機放置9個幾何體,三角形、五角形、圓形各有3片,分別為紅色、藍色和橙色;內(nèi)圓圈上有9個不同形狀的槽位。幾何體放置的朝向與內(nèi)圓圈槽位的朝向一致。機械手依次從外圓環(huán)上抓取9個幾何體放置在對應(yīng)的內(nèi)圓槽位,要求顏色相同的幾何體放置在一起,并且總路徑最短。

圖1 分揀平臺Fig.1 Sorting platform
2 模型建立
Tripod機器人在分揀過程中,對每個分揀工件都只允許抓取一次,這可以等效為一個帶約束條件的旅行商問題。旅行商問題(TSP)是指給定n個城市的點的坐標,遍歷所有城市以最短距離路線,即搜索自然子集X={1,2,…,n}(X的元素表示n個城市的編號)的一個排列π(X)=(V1,V2,…,Vn),使其滿足:

取最小值,其中 d(Vi,Vi+1)表示城市 Vi到 Vi+1的距離[8]。
本文采用遺傳算法進行TSP問題的求解。遺傳算法是一種借鑒生物進化過程中“物競天擇,適者生存”規(guī)則的智能算法,可以由1個8元組組成[9]:

式中:C為個體編碼方法;E為個體適應(yīng)度評價函數(shù);P0為初始群體;M為群大小;Φ為選擇算子;Γ為交叉算子;Ψ為變異算子;T為遺傳算法終止條件。
設(shè)機器人分揀的工件為n個,V={V1,V2,…,Vn}是n個工件的集合,[Dij]n×n(i,j=1,2,3,…,n)為物體Vi與物體Vj之間距離所組成的距離矩陣,計算出通過V中所有工件最短路徑矩陣D1。建立約束矩陣D2,D1與D2是同維矩陣。將D1與D2進行組合,尋找F=min(Td)的抓取順序。這樣就建立了機器人分揀順序的數(shù)學模型,將機器人分揀順序最優(yōu)化問題抽象成圖論中TSP來求解。
3 最優(yōu)路徑規(guī)劃問題遺傳算法實現(xiàn)
3.1 遺傳算法流程
通過遺傳算法進行機器人分揀最優(yōu)路徑規(guī)劃,并在其中加入約束矩陣完成目標。算法的流程如圖2所示。
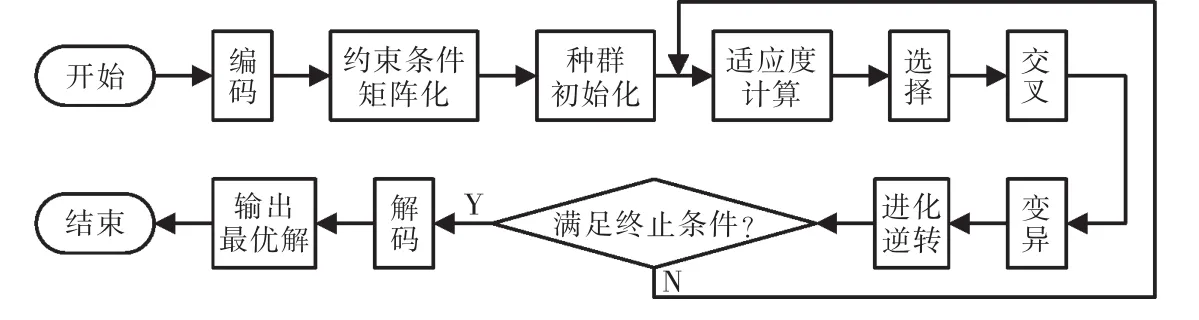
圖2 遺傳算法流程Fig.2 Flow chart of genetic algorithm
3.2 遺傳算法實現(xiàn)步驟
1)編碼:采用符號編碼方法,內(nèi)圓上9個點的順序與序號是固定的,依次標記為{1,2,3,4,5,6,7,8,9}。外環(huán)上9個點的順序是可以變化的,設(shè)定10代表橙三角形,11代表橙五角星,12代表橙圓,13代表黃三角形,14代表黃五角星,15代表黃圓,16代表藍三角形,17代表藍五角星,18代表藍圓,如圖3所示。
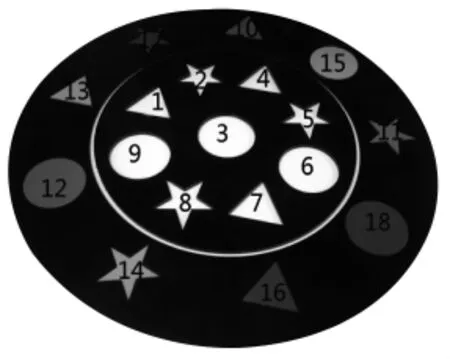
圖3 對象編號Fig.3 Object code
分揀臺上18個中心坐標,可以由Tripod機器人上的攝像機拍照求得,本文主要研究該機器人的路徑規(guī)劃問題,對圖像處理部分不作介紹。18個目標的坐標值如表1所示。
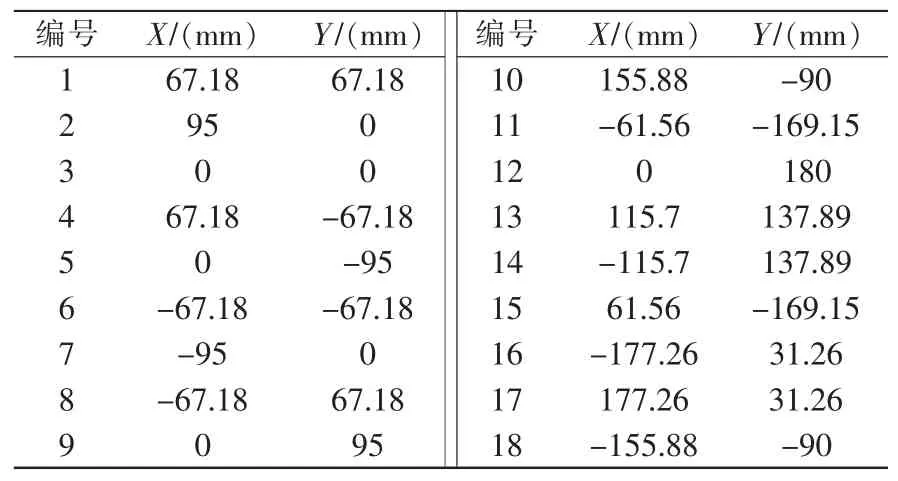
表1 18個編號的坐標表Tab.1 18 number coordinates
2)多約束條件矩陣化:根據(jù)模型,在生成的距離矩陣的基礎(chǔ)上添加一個對應(yīng)的約束矩陣為
約束矩陣中inf代表無限大數(shù)值,左上角的9×9部分限制內(nèi)環(huán)上9個幾何體之間不能相互在抓取的相鄰次序,右上角部分的9×9部分是從外環(huán)上抓取放入內(nèi)環(huán)上的幾何體的形狀必須是一樣的,且相同顏色放一起,左下角9×9部分是從內(nèi)環(huán)可以到外環(huán)上任何一個幾何體處抓取,右下角的9×9部分代表外環(huán)上9個幾何體之間不能是抓取的相鄰次序。約束矩陣的構(gòu)造是本遺傳算法中一個關(guān)鍵的步驟,約束條件矩陣化的實質(zhì)是對適應(yīng)度函數(shù)進行調(diào)整,對不符合約束條件的增加適應(yīng)度函數(shù)值,從而減少被選中的概率。
3)種群初始化:考慮到滿足約束條件,在約束矩陣的限制下通過一個隨機函數(shù)對種群進行初始化。
其中,n=18。
5)選擇操作:采用聯(lián)賽選擇機制,從群體中任意選擇一定數(shù)目的個體,其中適應(yīng)度最高的個體保存到下一代,反復執(zhí)行,直到保存到下一代的個體數(shù)達到預(yù)先設(shè)定的數(shù)目為止。
6)交叉操作:采用部分匹配交叉法(PMX),依據(jù)均勻隨機分布產(chǎn)生2個位串交叉點,定義這2點之間的區(qū)域為一匹配區(qū)域,并使用位置交換操作交換2個父串的匹配區(qū)域。
7)變異操作:采取隨機在18個目標中選取2個點,將其對換位置。
8)進化逆轉(zhuǎn)操作:為提高遺傳算法的局部搜索能力,引進多次連續(xù)的單方向進化逆轉(zhuǎn)操作,只有經(jīng)逆轉(zhuǎn)后,適應(yīng)度值有提高的才接受下來,否則逆轉(zhuǎn)無效。
對于每一個目標體進行交叉變異,代入適應(yīng)度函數(shù)中進行評估,選出適應(yīng)度最大的個體進行下一代的交叉、變異以及進化逆變操作,直到滿足設(shè)定的最大遺傳代數(shù)。
4 仿真與實驗結(jié)果
在MATLAB7.1環(huán)境下編寫與運行。種群數(shù)為100,交叉率為0.9,變異率為0.05,代溝為0.9,最大迭代次數(shù)為250。在MATLAB中用遺傳算法最優(yōu)抓取順序 15->6->18->9->12->3->14->5->10->1->13->4->17->8->16->7->11->2->15,總距離:3009.5752 mm,如圖4所示。
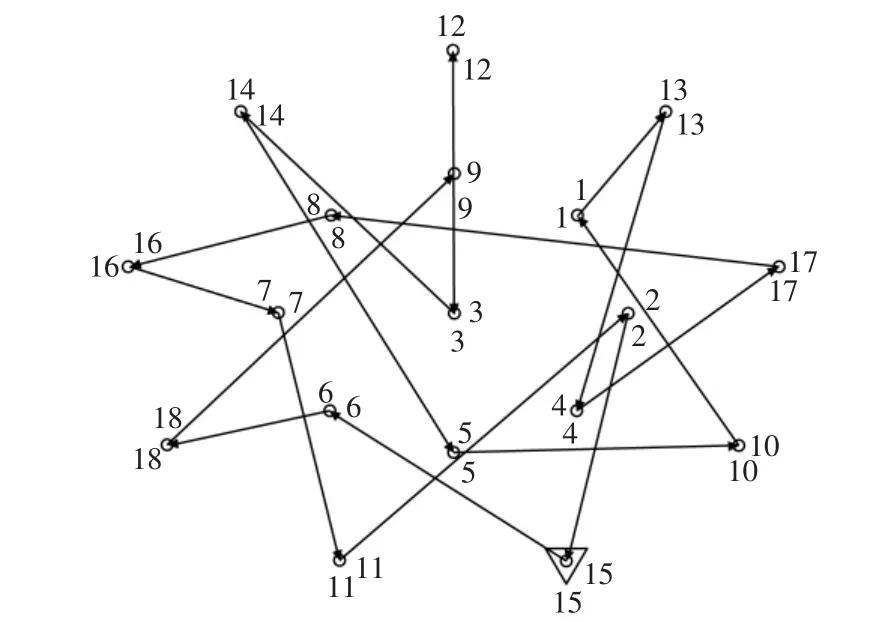
圖4 最優(yōu)路徑Fig.4 Optimal path
根據(jù)仿真結(jié)果得到的最優(yōu)路徑,利用TCPUDP Socket調(diào)試工具將最優(yōu)路徑數(shù)據(jù)通過TCP/IP發(fā)送給Tripod機器人,進行試驗。試驗結(jié)果表明機器人能夠按照最優(yōu)路徑準確抓取物體并放入內(nèi)圓相應(yīng)位置,如圖5所示。
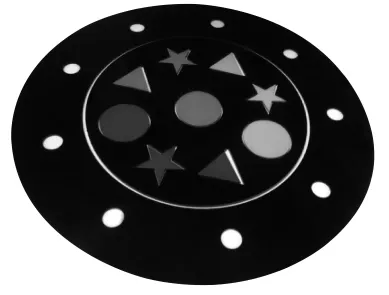
圖5 實驗結(jié)果Fig.5 Result of test
5 結(jié)語
通過添加約束矩陣的遺傳算法進行路徑的最優(yōu)化,可以有效減少機器計算運行的時間,提高抓取的準確性,在工業(yè)生產(chǎn)中能有效降低生產(chǎn)成本。提出的將多約束條件變成約束矩陣的方法,對于帶約束條件的TSP問題具有適用性,能夠在以后的TSP及機械手抓取物體的工程應(yīng)用中有較好的適用性、移植性。
[1] 王田苗,陶永.我國工業(yè)機器人技術(shù)現(xiàn)狀與產(chǎn)業(yè)化發(fā)展戰(zhàn)略[J].機械工程學報,2014,50(9):1-13.
[2] 譚民,王碩.機器人技術(shù)研究進展[J].自動化學報,2013,39(7):963-972.
[3] 田貴超,黎明,韋雪潔.旅行商問題(TSP)的幾種求解方法[J].計算機仿真,2006,23(8):153-157.
[4] 朱玲湘,廖芹,鄒亮.運用遺傳算法求解有約束條件的旅行商問題[J].華南理工大學學報:自然科學版,2004,32(4):97-100.
[5] Moon Chiung,Kim Jongsoo,Choi Gyunghyun,et al.An efficient genetic algorithm forthe traveling salesman problem with precedence constraint[J].European Journal of Operational Research,2002,140(3):606-617.
[6] 張永德,姜金剛,唐偉,等.基于遺傳算法的直角坐標式排牙機器人路徑規(guī)劃[J].哈爾濱理工大學學報,2013,18(1):22-26.
[7] 陳冰梅,樊曉平,周志明,等.求解旅行商問題的Matlab蟻群仿真研究[J].計算機測量與控制,2011,19(4):990-992
[8] 史峰,王輝,郁磊,等.MATLAB智能算法30個案例分析[M].北京:北京航空航天大學出版社,2011.
[9] 牟銜臣,謝東來,閆威,等.基于遺傳算法航路規(guī)劃TSP問題的研究[J].系統(tǒng)仿真學報,2013,25(8):86-89.
