SOM網絡在雷達目標識別中的應用
2015-01-16 01:22:52杜敦偉白艷萍
科技視界 2015年16期
王 龍 杜敦偉 白艷萍
(1.中北大學理學院,山西 太原 030051;2.北京機電工程研究所,中國 北京 100074)
0 引言
雷達是戰場信息處理系統最基本、最直接、最重要的信息來源之一,對雷達系統進行數字化和信息化改造,增加自動目標識別功能,是現代雷達武器系統的發展方向。識別系統中采用的識別算法是整個系統的核心和中樞環節。因此,識別算法是否具備原理簡單、結構合理、人工調整參數少以及性能穩定等特點,不僅決定識別系統的綜合分類能力,而且直接影響著系統維護與擴展的難易程度和穩健性[1]。
人工神經網絡模擬生物神經系統結構和信息處理機制,具有自組織、自學習等性能,允許樣本存在缺損和畸變,具有對不確定性問題的學習與適應能力,被越來越多地應用與目標識別領域中[2]。自組織特征映射網絡[3](Self-Organizing Feature Map,SOM)作為一類無監督學習的神經網絡模型,可以對外界未知環境或樣本空間進行學習或者模擬,不需要先驗知識,與BP神經網絡[4]等方法相比更適合用于雷達目標識別。
1 SOM神經網絡原理
自組織特征映射網絡 (Self-Organizing Feature Map,SOM)也稱Kohonen網絡,它是由荷蘭學者Teuvo Kohonen于1981年提出的。該網絡是一個由全連接的神經元陣列組成的無教師、自組織、自學習的網絡,實現從輸入空間(n維)到輸出平面(二維)的低維映射,并且映射具有拓撲特征保持性質,通過不斷地調整網絡節點連接權值,自動地尋找樣本數據類型間的內在特征并進行聚類[5]。
1.1 SOM神經網絡結構
典型的SOM網絡結構如圖1所示,由輸入層和競爭層組成。第一層為輸入層,輸入層神經元個數同輸入樣本向量維數一致;第二層為競爭層,競爭層節點呈全連接二維陣列分布,輸入節點和競爭節點之間以可變權值連接。
1.2 SOM神經網絡學習算法
自組織特征映射算法能夠自動找出輸入數據之間的類似度,將相似的輸入在網絡上就近配置,因此是一種可以構成對輸入數據有選擇地給予反應的網絡。自組織特征映射的學習算法步驟如下[5]:
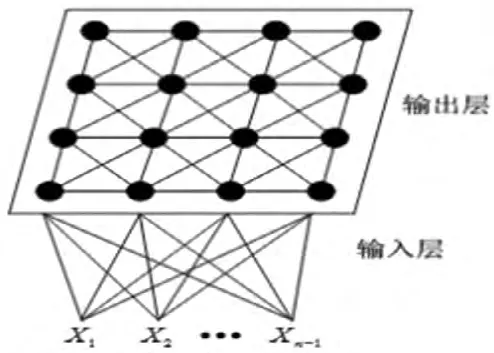
圖1 二維陣列SOM神經網絡模型
(1)網絡初始化
用隨機數設定輸入層和映射層之間的權值的初始值。對m個輸入神經元到輸出神經元的鏈接權值賦予較小的權值。選取輸出神經元j個“鄰接神經元”的集合Sj。其中,Sj(0)表示時刻t=0的神經元j的“鄰接神經元”的集合,Sj(t)表示時刻t的神經元j的“鄰接神經元”的集合。區域Sj(t)隨著時間的增長而不斷縮小。
(2)確定輸入向量
把輸入向量X=(x1,x2,…xm)T輸入給輸入層。
(3)尋找獲勝神經元
在映射層,計算各神經元的權值向量和輸入向量的歐氏距離。映射層的第j個神經元和輸入向量的距離計算公式如下:

其中,ωij為輸入層的i神經元和映射層的j神經元之間的權值。通過計算,得到一個具有最小距離的神經元,將其稱為勝出神經元,記為j*,即確定出某個單元k,使得對于任意的j,都有dk=min(dj),并給出
j其鄰接神經元集合。
(4)權值的調整
修正輸出神經元j*及其“鄰接神經元”的權值:
Δωij=ωij(t+1)-ωij(t)=η(t)(xij(t)-ωij(t))
式中,η為一個大于0小于1的常數,隨著時間變化逐漸下降到0。

(5)計算輸出 ok

式中,f(*)一般為0-1函數或者其他非線性函數。
(6)驗證結果
如達到要求(此要求根據具體問題具體確定)則算法結束;否則返回步驟(2),進行下一輪學習。
2 雷達目標識別實驗
2.1 實驗場景及數據說明
本實驗的場景以及場景的三維回波顯示如圖2所示。
其中,圖2中主要包含三種特征信息:公路、草地和車輛。兩條高速公路穿過一片草地,在上行高速公路中運行著五輛小轎車和一輛大卡車。本實驗的目的是準確識別出各個車輛的位置。
首先,利用統計的方法,選取合適的閾值,去除孤立點和不合理的聚集點,會得到非常好的結果。但是,此方法的閾值都是符合具體問題的,具有窮舉性,不具有通用性。

圖2 場景以其三維回波顯示圖
2.2 評價指標
針對此問題,本文定義了三個評價指標,分別為最小距離和D、信息覆蓋率ρ和冗余信息率ζ。
最小距離和:本文第二章中,用統計的方法選取合適的閾值,會得到雷達目標點的集合A。本文中集合A會作為標準目標點,用其它算法得到的雷達目標點集合記為S,那么S中每個點到A的所有點的最小距離求和,就是最小距離和D。計算公式如下:

式中,aj1,aj2分別為集合A中第j個點的橫縱坐標值;si1,si2分別為集合S中第i個點的橫縱坐標值。
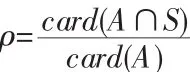
信息覆蓋率:集合A和集合S中位置相同的目標點占集合A的比例,計算公式如下:
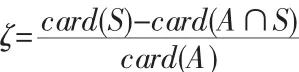
冗余信息率:集合S中除去集合A和集合S中位置相同的目標點,其余的目標點占集合A的比例,計算公式如下:
通過評價指標的定義,我們可以知道,最小距離和D和冗余信息率ζ越趨近于0越好,而信息覆蓋率ρ越趨近于1越好。
3 實驗結果
文獻[2]中,提出競爭層神經元的個數應為聚類類別的1.5~2.5倍,因此,本實驗選取從5×5到12×12幾個類別進行比較分析。進行200次實驗,計算平均值進行統計分析,得到表1:
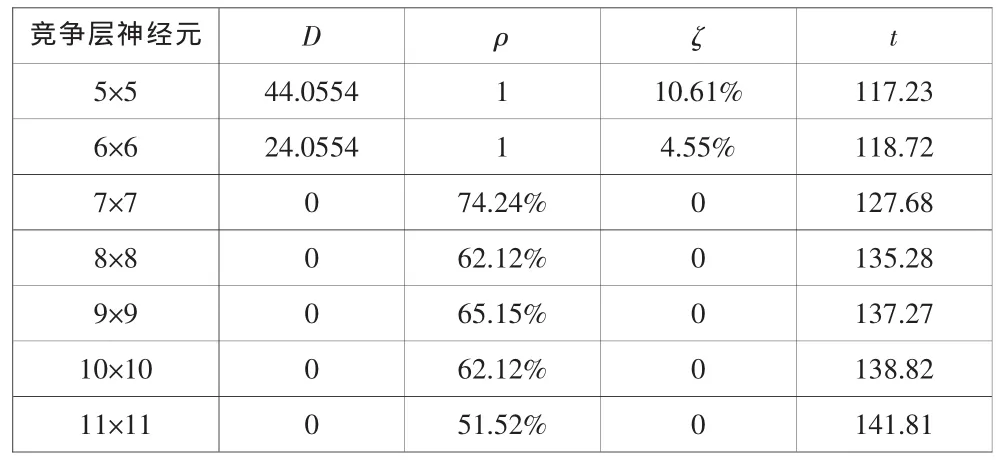
表1 實驗結果
從表1中,我們可以知道,隨著競爭層神經元個數的增加,最小距離和D越來越小,最后變為0,而信息覆蓋率ρ由1慢慢變少,冗余信息率ζ也會也來越少,直至變為0,但是運行時間t會變得越來越長。通過比較,我們發現當競爭層神經元為6×6時,各個指標最好。于是得到如圖3所示的目標點相對位置圖。
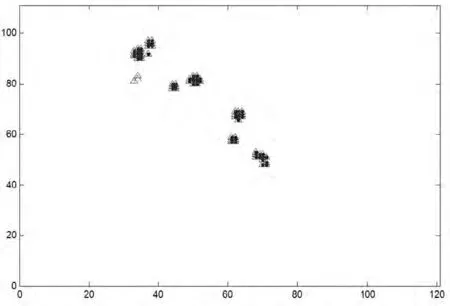
圖3 聚類結果和統計方法的目標點位置對比圖
其中,圖3中三角形是SOM網絡得到的目標點位置即S,實心圓點是統計的方法得到的目標點位置即A。
4 結論
本文針對現有的雷達目標識別問題,采用了無監督的SOM網絡得到了較為理想的結果。但是還是存在一些不足,如:學習率的選取,本文只是選取了η=0.9,不具有普遍性,下一步的改進方向就可以是把學習率改為學習函數,這樣,可以根據前一步或者前幾步的學習速率,自動的調整其大小。另外,還可以把粒子群算法(PSO)引入其中,進行權值訓練,加快運行速度。總之,SOM網絡在雷達目標識別中具有其特有的優勢。
[1]郁文賢.智能化識別方法及其在艦船雷達目標識別系統中的應用[D].長沙:國防科技大學,1992.
[2]Bishop C M.Neural networks for pattern recognition[M].Oxford,England:Oxford University Press,1996:1-28.
[3]涂曉芝,顏學峰,錢鋒.基于SOM網絡的基因表達數據聚類分析[J].華東理工大學學報:自然科學版,2006,32(8):992-996.
[4]張靜,宋銳,郁文賢.雷達目標識別中的BP神經網絡算法改進及應用[J].系統工程與電子技術,2005,27(4):582-585.
[5]王小川,史峰,郁磊,李洋.MATLAB神經網絡 43個案例分析[M].北京:北京航空航天大學出版社,2013:186-195.
