基于螺旋理論對4-UPU并聯機構的自由度及運動分析*
2015-01-15 03:07:54胡興偉夏廣嵐殷寶麟孫趙寧莊騰飛
現代機械 2015年2期
胡興偉,夏廣嵐,殷寶麟,于 峰,孫趙寧,莊騰飛
(佳木斯大學機械工程學院,黑龍江 佳木斯 154007)
與串聯機器人相比,并聯機器人具有許多優點,而近年來對少自由度并聯機構的研究已成為了一個熱點[1-3]。因為少自由度并聯機器人由于其結構簡單、驅動容易、造價低而具有較高的實用價值,在實際中有廣泛的應用前景[4-7]。
本文研究的少自由度并聯機構在空間能實現三移動一轉動,它是由上下平臺以及四個分支鏈構成。四個支鏈的結構均對稱分布,且每個支鏈都由一個虎克鉸,一個移動副,一個虎克鉸組成,下平臺為靜平臺,上平臺為動平臺。本文應用螺旋理論[8]對4-UPU并聯機構進行了自由度分析,最終成功驗證了該并聯機構的自由度為4。
1 自由度分析
1.1 螺旋理論基本知識
在幾何數學中,一條空間直線的姿態(位置和方向)是由兩個點來確定的。在螺旋理論的范疇里,如圖1所示,空間任何一條直線的確定是由方向矢量S和矢量S對原點的線矩S0來定義表示的,直線也叫做線矢量(節距h=0),是旋量一種特殊的情況。直線的的矢量表達形式如下:

其矢量方程的標準形式即為:

齊次坐標滿足:

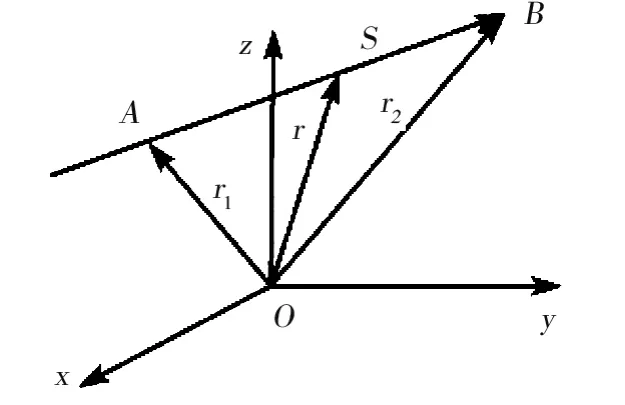
圖1 直線的矢量方程
其中L、M、N是有向線段 S的方向數,P、Q、R是該線段S對原點的線矩在X、Y、Z三軸的分量。當S·S=1時,則線矩S0的模表示直線到原點的距離。此時ξ為單位線矢量;當S0=0時,即直線的線矩為零,此時直線經過原點。由表達式顯然可知,S·S0=0。這種滿足正交條件的齊次坐標(S;S)0表示了直線在空間的方向及位置,(S;S)0稱為直線的Plücker線坐標。
若節距∞≠h≠0,且 S·S0=0,S≠0 時,用 h=S·S0/S·S來表示該旋量的節距。那么該旋量可以看作是一個線矢量與一個偶量的同軸合成,即為:

若節距 h=0,S·S0=0,S≠0時,旋量就退化為線矢量,此時可以用來表示一個轉動副或者一個約束力;若S=0,S0≠0時,則旋量退化為偶量,即為(0;S0),此時的節距為無窮大,那么該旋量可以表示一個移動副和約束力偶。
若 ξ1,ξ2分 別 為(L1,M1,N1;P1,Q1,R1)與(L2,M2,N2;P2,Q2,R2),則兩個螺旋的互易積定義如下:

如果所研究的兩個螺旋ξ1,ξ2之間的互易積為零,即為:

在這里稱與螺旋1構成互易積為零的螺旋2為螺旋1的反螺旋。可以從物理的運動及力的角度解釋,可以把ξ1看作力螺旋,ξ2看作是運動螺旋,在如上表述的情況下,無論該力螺旋的力及力矩多大,都無法對物體進行做功,不影響物體的運動形態,也不改變物體在約束允許下的螺旋運動。為了更加清晰的來描述螺旋與反螺旋的定義,不妨設ξ=(S;S0)和,那么可以表示如下:

通過上述等式,對于運動螺旋ξ的反螺旋ξr,若是它的節距為零,則代表一個約束力,其限制了沿約束力方向的移動;若是它的節距為無窮大,則代表一個約束力偶,限制了繞該力偶方向的轉動。
當兩個螺旋的互易積為零時,如果一個螺旋表示了機械系統的約束反力,另一個則是為該機械系統所允許的運動;反之,如果一個螺旋表示了物體的運動,另一個則是機械系統本身所產生的約束。
兩螺旋互易積為零的解析式還可以表示為:

可見,若ξ為ξr的反螺旋時,同理ξr也一定為ξ的反螺旋,這正是反螺旋的互逆性的定義。兩個互逆的螺旋的互逆性和線性相關性只與兩個螺旋自身的參數有關,與原點的位置無關,也即與坐標系的選擇沒有任何聯系。因此在分析某些機構尤其是少自由度并聯機構的自由度時,一般可以從以下幾個步驟來完成:
1)對于對稱型并聯機構,首先建立適當的坐標系,根據各支鏈的運動副分布情況及屬性寫出某一支鏈相對應的各運動副的螺旋;對于非對稱性的并聯機構,支鏈相同的可以只寫出一個支鏈中的各個運動副的螺旋,不同的支鏈應分別列寫出各支鏈相對應的運動副螺旋即可;
2)根據線性代數理論,若線性方程組有n個未知數,方程組系數矩陣的秩為r,根據具體情況進行求解,若n>r和n<r時,在無窮多個解向量中,解向量之間最大的線性無關的數目為n-r,這樣由互逆螺旋線性方程決定的基礎解析將會有n-r個螺旋構成,這也是最大的線性無關的反螺旋數目。
3)通過分析該并聯機構的階數、構件數、運動副的數目等一系列相關的參數后,那么利用修正后的 Kutzbach-Grüber公式[4]便可以計算機構的自由度。
1.2 4-UPU機構的自由度計算
修正后的Kutzbach-Grüber公式為:

在公式中,其中M表示機構的自由度;d表示機構的階數,機構的階數由公共約束數來確定;n表示所有的構建數目;g表示機構中的運動副數目;fi表示第i個運動副的自由度數目;ν為多環并聯機構在去除公共約束的因素后的冗余約束的數目;ζ為機構中存在的局部自由度。
如果4-UPU機構的動、靜平臺不為正方形時,根據4-UPU并聯機構的結構形式以及排列組合的原理可以得到24種不同的結構組合形式。在這里只對4條支鏈的兩端均采用虎克鉸垂直布置的結構形式進行分析驗證。該并聯機構的4條支鏈的各運動副布置情況的具體結構如圖2所示。
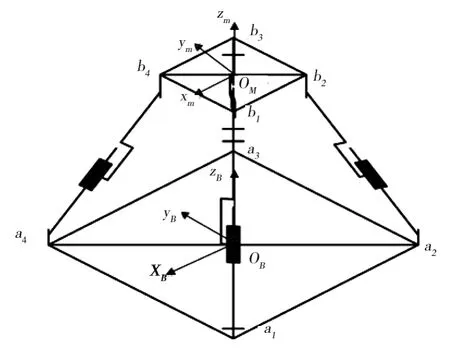
圖2 4-UPU并聯機構(虎克鉸垂直布置)結構圖
從圖中可以看到該結構的鏈接布置情況,與靜平臺相鏈接的為虎克鉸 ai(i=1,2,3,4);與動平臺相鏈接為虎克鉸 bi(i=1,2,3,4)。四個支鏈的結構對稱,均由虎克鉸-移動副-虎克鉸的形式進行鏈接。建立下平臺靜坐標系OB-XBYBZB,點OB位于下平臺的質心點,XB軸平行于a1a4,同理YB軸平行于a1a4,Zb軸垂直于下平臺向上。建立機構的動平臺坐標系OM-XmYmZm,其中點OM位于上平臺的質心點,Xm軸平行于b1b2,v軸平行于b1b4,ZM軸垂直于上平臺向上。由于一個虎克鉸副等效于兩個軸線互相垂直相交的轉動副(即U=2R),在此定義其中一個R垂直于定平臺,另外一個R則平行于靜平臺。
由于四條支鏈完全對稱,因此可以選擇研究其中任何一條支鏈即可。其中給予以下結構位置參數,(p q 0)為下平臺虎克鉸的中心位置,(i j k)為移動副的方向余旋,(l m n)為上平臺虎克鉸的中心位置。那么根據所給出的位置參數,可以寫出4-UPU并聯機構第一支鏈的螺旋表示:

根據互易積計算公式ξi·ξi(r)=0,可以求得該支鏈的一個反螺旋為:

通過計算結果可以清晰地看出ξi(r)為一個反螺旋力偶,其實它的存在限制了動平臺繞X軸的轉動,因此根據結構的完全對稱型知道四個支鏈均有相同的反螺旋力偶,根據高等空間機構學Grassmann線幾何原理,該并聯機構的4個反螺旋不能構成公共約束,并且僅有2個是線性無關的,那么d=6,υ=t-k=2,再看結構布置圖2,該并聯機構不存在局部自由度,因此 ζ=0,根據修正后的 Kutzbach-Grüber公式(9)計算如下:
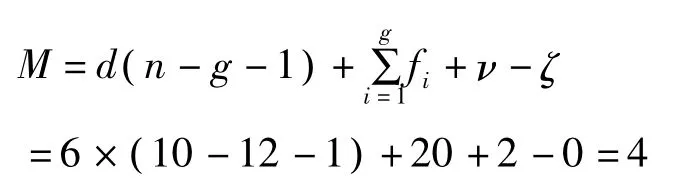
由計算結果可知,該并聯機構的自由度數為4。
2 4-UPU運動分析
通過上面基于螺旋理論及Kutzbach-Grüber公式對4-UPU型并聯機構的自由度進行了驗證并取得了正確的結果值。可以從其螺旋的位置及方向可以確定動平臺可以實現3T1R,針對該機構的結構特點及動平臺的位姿給出的詳細描述,然后可以順利地構造出其運動學模型,并得到以下結論:
動平臺繞z軸的轉動和沿x、y、z三坐標軸的移動,該機構屬三移動一轉動自由度機構。通過初步建立4-UPU并聯機構的模型,并基于Pro/E中MDX模塊對所實現的運動做了一個仿真。下面給出了機構的運動示意圖,其中的圖3給出了動平臺相對于靜平臺沿x軸方向的移動,圖4給出了動平臺相對于靜平臺沿y軸方向的移動,圖5給出了動平臺相對于靜平臺沿z軸方向的移動,圖6則給出了動平臺相對于靜平臺沿z軸方向的轉動。

圖3 動平臺沿X軸的移動
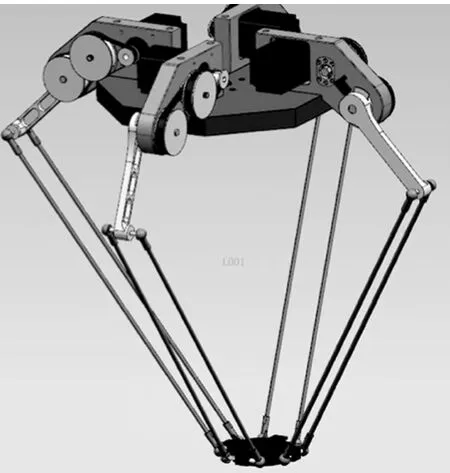
圖4 動平臺沿Y軸的移動
圖5 動平臺沿Z軸的移動
圖6 動平臺繞Z軸的轉動
通過以上的運動分析發現,4-UPU并聯機構完全可以實現四自由度的位姿,這樣不僅從理論上證明了這點,而且通過對其進行模型的建立和分析,同樣證明了這一點。
3 結論
本文利用螺旋理論以及反螺旋的思想,以4-UPU為例計算出了該并聯機構的自由度數,驗證了該算法的正確性和簡便性。從理論上證明了其合理性,緊接著通過對其結構建模并分析驗證,可以順利地保證該機構實現3T1R的預期目的。這對后續研究其運動學及動力學分析奠定了基礎。
[1] 朱建國.并聯機構的研究[J].科協論壇,2010(9),94-95
[2] 石曉宇.少自由度并聯機構研究綜述[J].煤礦機械,2011.(10)
[3] 于振文,張亞杰.少自由度并聯機構研究綜述[J].制造業自動化,2011(2)
[4] 黃真,劉靖芳,曾達幸.基于約束螺旋理論的機構自由度分析的普遍方法.中國科學(E輯:技術科學),2009,39(1):84-93
[5] 蔡光起,原所先,胡明,等.少自由度并聯機床自由度配置和構型設計.第三屆海峽兩岸制造科技研討會文集,2003:349-354
[6] D.Zlatanov,C.M.Gosselin.A New parallel architecture with four degrees of freedom[C].The 2ndworkshop on Computational Kinematics,Seoul,2001:57-66
[7] 李勤川,楊元兆,陳巧紅,胡旭東.基于螺旋理論的少自由度并聯機構的自由度分析[J].浙江理工大學報,2007(7)
[8] 黃真,趙永生,趙鐵石.高等空間機構學[M].北京:高等教育出版社,2006
