兩相步進電動機正弦恒流斬波細分驅動器設計
2015-01-13 01:55:06鄭雪欽高鏘源徐廣令巍明明
微特電機 2015年9期
鄭雪欽,高鏘源,徐廣令,巍明明
(廈門理工學院,廈門361024)
0 引 言
步進電動機是數字控制系統中的執行元件[1],在一些自動控制儀器上的應用十分廣泛[2]。如精密加工、航空航天自動化技術等領域內,由于對定位精度要求高,導致對步進電動機的細分數要求也越來越高,所以研制一種高精度、低成本、高性價比的步進電動機驅動控制系統具有非常重要的意義。
隨著步進電動機驅動技術的不斷發展,經過實驗證明,發現細分驅動控制方式不僅可以減小步進電動機的步距角,而且還能通過細分控制來減少步進電動機在低頻工作時的低頻振動問題,大大提高電機運行的平穩性[3]。雖然現有的一些步進電動機的集成驅動芯片可以達到一定的控制效果,而且驅動電路簡單,但是靈活性不高,使步進電動機驅動電路的設計和使用在一定程度上受到了限制[4]。還有些步進電動機的驅動器利用高性能的微機、高精度的DA 芯片等來實現驅動控制,雖然性能好,但成本高,性價比低。
本文設計了以單片機為主控制器、4 個8 位數字電位器通過運放電路構成兩路具有16 位的DA功能的數模轉換器、分立功率驅動電路等構成恒流斬波正弦細分驅動器,實現了步進電動機恒轉矩、無振動和無噪聲的驅動控制。該驅動器具有細分數高,細分選擇范圍廣,電機輸出電流大。電機轉速可根據輸入脈沖頻率來調整,使系統的控制更加靈活;由于本文設計的細分驅動控制器可以提高步進電動機的細分數,生產成本低,適用于大部分的兩相步進電動機的控制要求,所以該細分驅動控制器具有驅動性能好、實用性強的特點。
1 步進電動機系統的整體方案設計
為了使步進電動機系統工作更加可靠靈活,所以提出系統采用通過微機控制兩路DA 數模變換器,輸出兩個相位相差90°的正弦波參考電壓,與通過電機的采樣相電流值進行比較,利用斬波對步進電動機進行驅動。通過同時改變步進電動機的兩相相電流值,實現步進電動機的恒流斬波控制。令ia為流過A 相的相電流,ib為流過B 相的相電流,則ic為ia與ib的合成電流[5]。
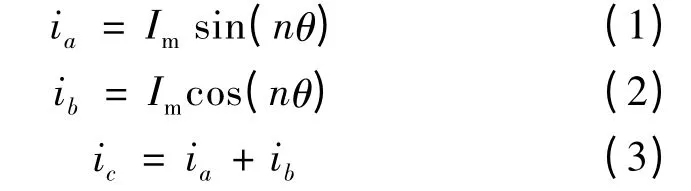
式中:θ 為m 細分下的步距角,n=1,2,…,m。
以2 細分為例,畫出步進電動機在2 細分驅動時的磁場合成矢量圖,如圖1 所示。
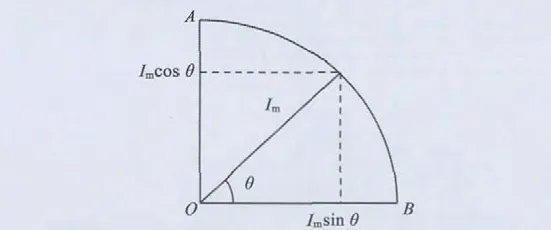
圖1 步進電動機在2 細分時的矢量合成圖
1.1 系統設計框圖
系統設計框圖如圖2 所示。兩相步進電動機細分控制器通過按鍵選擇細分數、電機繞組輸出電流的大小和電機的正反轉,可以通過不同的頻率來改變電機的轉速。兩路16 位DA 數模轉換器在微機的控制下,輸出兩個相位相差90°的正弦波參考電壓,通過兩個相電流采樣電路,將相電流的變化轉化為電壓變化。再將采樣電壓經過低通濾波后,利用L6506D 內部自帶比較器,與雙路DA 轉換器輸出的參考電壓進行比較,通過比較的結果,來控制L298N橋式電路的開關,實現恒流斬波控制,從而使步進電動機輸出的相電流實時跟隨輸入的正弦參考信號的變化。為了簡化設計,本文采用單極性正弦波絕對值信號作為參考電壓。通過微機控制改變L298N橋式電路的橋臂導通方向,來改變電機繞組相電流的電流流向,從而達到相電流的雙極性控制的目的。
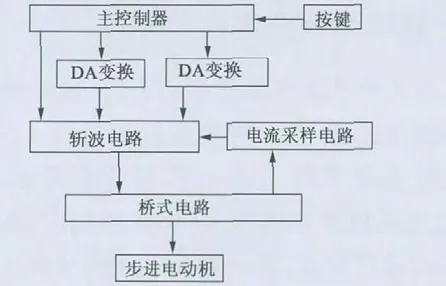
圖2 系統設計框圖電路
1.2 16 位DA 數模轉換器
由于系統要求DA 輸出的參考電壓為正弦波,細分數達到128 細分及以上,且電機的轉速要求隨輸入的脈沖頻率來改變,利用單片機控制DA 數模轉換器,來產生正弦波參考電壓。因此,系統對DA的精度要求比較高,理論上16 位的DA 可以滿足256 細分設計要求。假設參考電壓為1 V,系統運行在128 細分時,部分正弦波在一定角度時對應的理論值與16 位DA 的輸出理論值如表1 所示。由表1可知,16 位DA 輸出值與理想的正弦波十分接近,相對誤差小于0.0001%,可以滿足128 細分的設計要求。
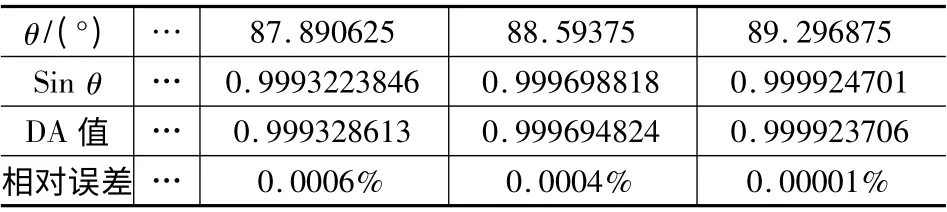
表1 16 位DA 正弦輸出理論值與現對誤差
由于現有的16 位DA 芯片比較貴,不能滿足設計低成本的要求,所以在系統設計時,采用模電中的加法器原理,將兩個低成本的具有8 位DA 轉換功能的數字電位器,通過運放生成一個具有16 位DA功能的數模轉換器。將其應用在步進電動機的細分驅動器上,原理圖如圖3 所示。輸出電壓:

式中:C 為常數。
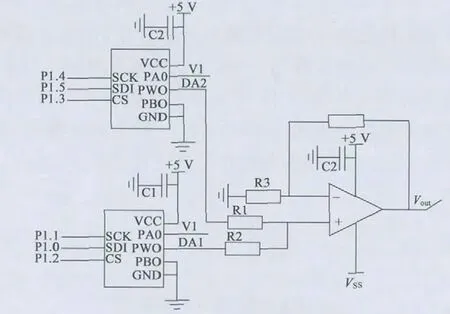
圖3 16 位DA 數模轉換器
通過測試兩路16 位在128 細分下DA 參考電壓的輸出,示波器測試圖,如圖4 所示,兩路信號的幅值相同,相位角相差90°,符合設計要求。
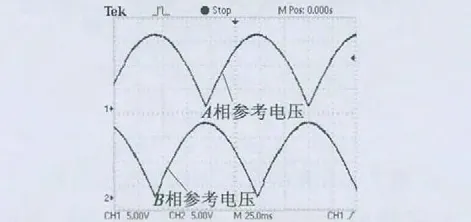
圖4 16 位DA 輸出參考電壓圖
1.3 驅動電路的設計
步進電動機的驅動電路如圖5 所示,由一個L6506D 和一個L298N 組成。L6506D 內部自帶兩個比較器,步進電動機的兩個繞組的反饋相電流分別經過兩個采樣電路轉換為電壓后,與微機控制的兩路16 位DA 數模轉換器輸出的兩個正弦參考電壓進行比較,當負載繞組的相電流采樣值達到DA的輸出的參考電壓時,對應的比較器會觸發復位,將L298N 的H 橋電路斷開,并通過回流通道,使步進電動機的相電流逐漸變弱,當負載繞組的相電流采樣值小于DA 的輸出的參考電壓時,比較器會觸發開通信號,將L298N 的H 橋電路打開,使負載電流增加,如此反復循環。從而實現步進電動機兩相相電流實時跟隨輸入參考正弦信號的變化,達到正弦恒流斬波的驅動控制目的。其中芯片L6506D 的振蕩器工作頻率外接R9,C13 電路控制如圖5 所示,其工作頻率:

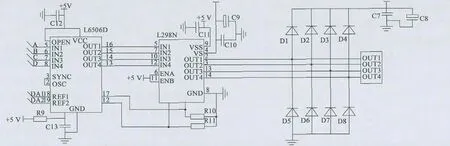
圖5 步進驅動電路原圖
1.4 濾波器
由于步進電動機的驅動處于實時開通與關斷,造成采樣電壓有電壓毛刺和高頻分量,如果直接將采樣電壓送到比較器,會使電機的輸出電流與實際的設置電流有誤差,而且該誤差會隨著開關頻率的增加而增加。為此,系統采用了一階有源濾波器,如圖6 所示,對采樣的電機相電流進行濾波。
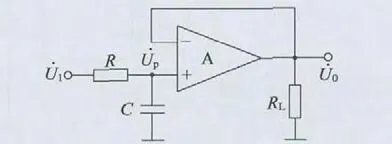
圖6 RC 低通濾波器
由式(7)可知,該濾波器的輸出不受負載影響,符合設計的要求。如圖7 所示。
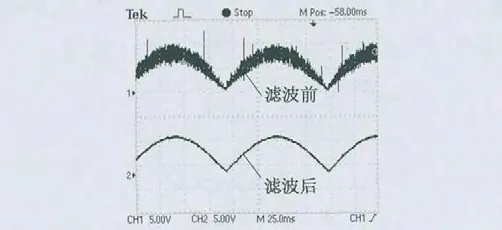
圖7 濾波前后的采樣相電流波形
濾波前的采樣波形與濾波后的采樣波形進行對比,濾波后的采樣波形只剩下直流成分,符合理論設計要求,證明了濾波器設計的有效性。
將采樣電壓進行濾波后再送到比較器端,測試波形如圖8 所示,電機的實際輸出電流與設置的電流十分接近,實驗證明系統設計有效。
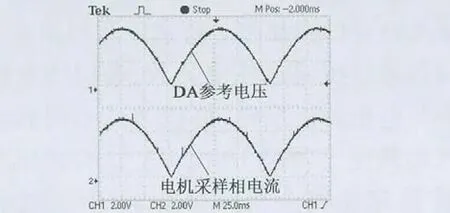
圖8 采樣電壓與DA 輸出參考電壓
2 軟件設計
為了滿足系統控制靈活的設計要求,DA 的參考電壓的變化頻率要隨著輸入微機的脈沖頻率的變化而變化,這樣才能使得驅動器具有更高的使用靈活。而且兩路DA 的輸出參考電壓要同時變化時才能滿足恒流斬波驅動的要求。為此系統通過軟件上的設計,使得四個數字電位MCP41010 能夠同時改變,以達到設計的要求。
3 細分驅動系統整體性能測試
兩相步進電動機細分驅動系統,在開機前設置好后,開機測試。兩相步進電動機運行在128 細分時,兩相繞組電流采樣電流示波器所示界面如圖9 所示,步進電動機兩相繞組AB 的幅值相同,相位角相差90°。經過多次測試,驅動器在不同細分數和不同參考電壓下能平穩的運行,完成了系統設計最初所設的目標,系統的細分數可以達到128 細分,由于所用的步進電動機較小,所以電流一般設置在1 A 左右,如果做好散熱處理,電機輸出電流可以達到1.75 A 左右。
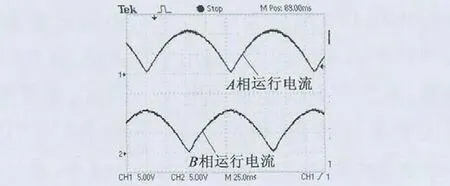
圖9 兩相繞組電流采樣示波器界面
4 結 語
系統測試結果證明設計方案可靠可行,如果使用處理速度更高的微機或者使用轉換速度更快的DA 數模轉換器,則可以提高電機的運轉速度。 由于整個系統的設計合理有效,生產成本低,細分數高,系統工作可靠靈活,有較高的驅動能力,所以該系統其具有較強的實用性。 同時也說明了采用分立器件的細分驅動具有較高的實用性,而且系統自帶電路保護,可以使整個驅動器的工作安全性提高,具有較高的實用價值。
[1] 余炳雄,陳志玲,黎浩樑.二相步進電機驅動電路的設計[J].華電技術,2009,33(1):36-33.
[2] 朱武,涂祥存,操瑞發,等. 基于L6506/L298 芯片細分步進電機驅動系統設計[J].電氣自動化,2011,33(1):10-12.
[3] 王祖麟,李志雄. 步進電機一體化控制系統的設計與實現[J].電子技術,2014,8(13):49-51.
[4] 謝長君,杜康,劉力. 兩相步進電機細分驅動器研究[J].武漢理工大學學報,2013,35(6):851-852.
[5] 董圣英,劉建亭,霍孟友.基于驅動電路3955 的步進電機細分驅動器設計[J].濟南大學學報,2010,24(4):399-400.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
藝術啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
