基于負載轉矩觀測器的永磁同步電動機模糊滑模控制
2015-01-13 01:55:28楊渭濱呂帥帥
微特電機 2015年12期
關鍵詞:設計
楊渭濱,呂帥帥
(西北工業大學,西安710072)
0 引 言
永磁同步電動機具有結構緊湊、功率密度高、高氣隙磁通和高轉矩慣量比等特點,在各行業中得到廣泛應用。但是永磁同步電動機是一個非線性、強耦合的復雜系統,對于高精度伺服控制,傳統的PI控制已經遠遠不能滿足要求。對于永磁同步電動機目前存在的問題,學者們提出了許多先進的非線性控制算法,比如模糊控制、反推控制、滑模控制、自適應控制及迭代控制等[1-2]。
電機的負載轉矩是變化并且無法精確測量的非電物理量,它對電機轉速波動產生很大的影響。因此,在控制過程中,對負載擾動的估計和反饋有重要的現實意義。
滑模變結構控制(以下簡稱SMC)和模糊控制以下簡稱FLC)對外界的干擾及其系統的參數不確定性均有較強的魯棒性。文獻[3]將滑模控制應用到永磁同步電動機控制系統,控制結果無超調且具有較好的魯棒性;文獻[4]利用具有消抖作用的高階滑模控制算法,提出一種永磁同步電動機的高階滑模控制策略,該方法在一定程度上消除了傳統滑模控制中固有的抖振問題,但是沒有對負載變化做出相應的處理;文獻[5]設計了一種非奇異高階終端滑模觀測器來消除系統的抖動,具有比較好的效果,但是設計參數過多,并且參數選取設計較為復雜,不便于工程應用;文獻[6]針對永磁同步電動機的非線性摩擦設計了自適應模糊邏輯控制器,有效地抑制了非線性摩擦帶來的干擾;文獻[7]實現了模糊預補償PI 速度調節,經DSP 試驗表明了該方法的有效性,但是仍然沒有考慮到對負載的變化進行補償。結合滑模和模糊控制的優點,本文將滑模控制作為永磁同步電動機的速度環電流環的控制,并且設計了轉矩負載觀測器,將模糊控制作為速度擾動以及負載擾動的前饋補償控制器,設計了基于負載擾動模糊前饋的滑模控制系統,將負載擾動和轉速擾動分別做出補償并結合滑模控制的優點。這是本文首次提出并試驗驗證。這樣不僅提高了轉速的穩定性能,同時也增強了系統對負載擾動的抗干擾性能,仿真和試驗驗證了該方法的有效性。
1 永磁同步電動機的數學模型
永磁同步電動機在d,q 軸旋轉坐標系下的數學模型[3-5]:
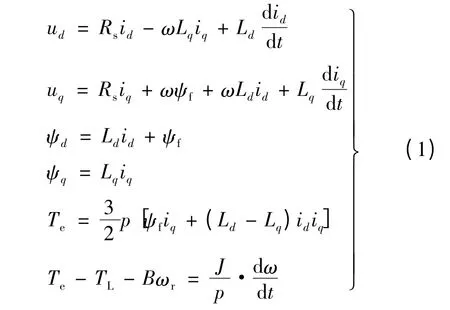
式中:ud,uq,id,iq,Ld,Lq,ψd,ψq分別代表d,q 下的電壓、電流、電感、磁鏈;Rs是定子電阻;ψf為永磁體磁通;J 為轉動慣量;p 為極對數;B 為粘滯系數;ωr為機械速度;ω 為電角速度;TL,Te為機械負載轉矩和電磁轉矩。
2 轉矩負載觀測器的設計
在永磁同步電動機系統中,負載轉矩未知,但是ωr,id,iq是可以測到的,因此可以利用誤差反饋校正負載轉矩,由式(1)可以得到式(2):

構造參數可調估計模型如式(3)所示,轉矩與轉速的關系如式(4)所示:
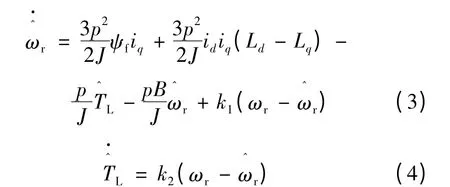
式中:k1,k2是可以設計的參數。定義估計得誤差:Δω=ωr-,ΔTL=TL-,由設計目標Δω=0,ΔTL=0,式(2)與式(3)相減可以得到誤差動態方程組[7]:

當選擇k1>0,k2<0,觀測器是漸進穩定的,由式(5)可求得狀態觀測器的極點:

假如選取極點位置s1=s2=-K(K >0)處,可以求得一組穩定解:
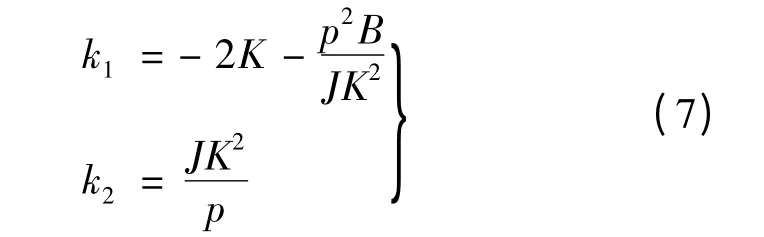
選擇適當的K,可保證負載轉矩估計的誤差按指數迅速衰減到零,保證了迅速收斂到TL。
3 滑模和模糊前饋控制器的設計
3.1 滑模控制器的設計
取永磁同步電動機系統的狀態變量:
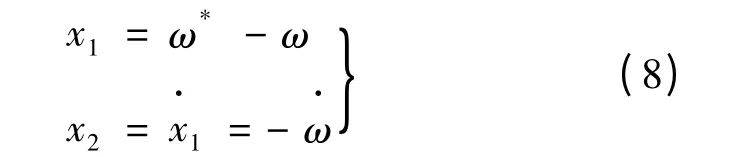
式中:ω*為給定轉速;ω 為實際轉速。
取系統的滑模面:

對s 求偏導可得到:

式中:ε,k 均為大于零的常數。
取指數趨近律:

結合式(8)和式(1)可得:

將式(12)代入式(10)以及結合式(11)可得:

3.2 模糊前饋控制器的設計
針對負載擾動和轉速的穩定性,本文設計了兩個模糊控制器,由于滑模算法本身的特性,永磁同步電動機的起動時間相對于傳統的PID 較慢,并且永磁同步電動機調速系統有抖動。為了克服這些缺點,可以通過加入前饋補償的方式,利用模糊控制算法對系統輸入進行補償,間接削弱滑模控制帶來的轉速抖動,而且增強了系統快速性。其次針對負載擾動,利用設計的負載觀測器,對輸入的電流進行補償,消除負載擾動帶來的轉速干擾。
對于轉速前饋的模糊控制器,以轉速的誤差以及轉速誤差的變化率為輸入[9],電流為輸出,由于電機的抖動可以由轉速的變化直接體現出,因此通過轉速誤差及轉速誤差的變化,作為永磁同步電動機的輸入補償,取得減少抖動的效果。對于負載的擾動,同樣采取二維模糊控制器,以觀測器的負載變化和變化率為輸入,電流為輸出,對系統輸入進行補償。結構如圖1 所示。
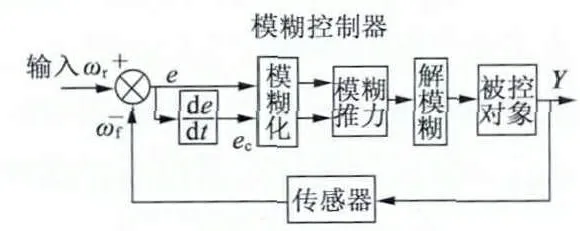
圖1 模糊控制器的結構
本系統中,取輸入輸出的語言變量:{正大,正中,正小,零,負小,負中,負大},輸入輸出的模糊子集:{PB,PM,PS,ZO,NS,NM,NB},相應的論域:{6,5,4,3,2,1,0,-1,-2,-3,-4,-5,-6}。
根據控制要求以及控制精度,將誤差e 和誤差的變化率ec分為7 個模糊語言變量,由此生成了49條模糊規則。如表1 所示。
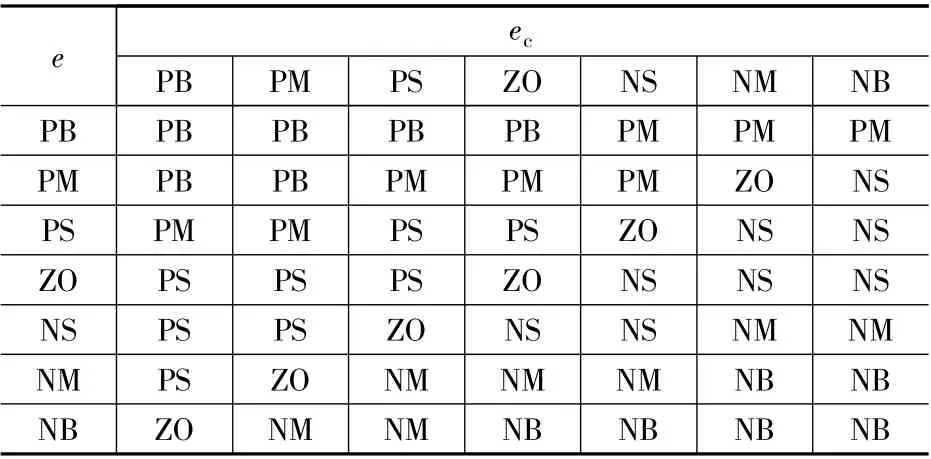
表1 模糊規則表
4 仿真和實驗研究
4.1 仿真實驗研究
仿真實驗的結構圖如圖2 所示。
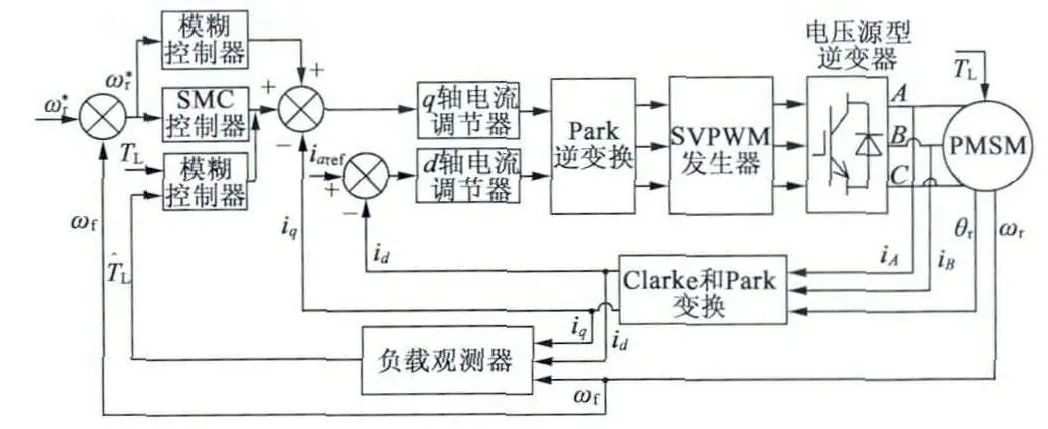
圖2 模糊控制器結構
圖3 是負載觀測器的跟蹤結果,其中點畫線是加入負載擾動真實加到電機負載端的負載,實線代表觀測器的跟蹤結果。在運行過程中,在給定額定負載的情況下加入從-1 N·m 到1 N·m 的隨機負載干擾。由圖3 可知,負載轉矩觀測器能夠快速準確地觀測出系統在運行過程中的負載所發生的變化。
圖4 是加入負載擾動后的轉速曲線,其中實線是速度給定,點畫線表示滑模和模糊前饋控制下的速度曲線,虛線是PI 控制下的速度曲線。與傳統的PI 速度曲線相比,滑模和模糊前饋控制能夠快速跟蹤給定曲線,在加入負載擾動[-1 N·m,1 N·m]的情況下,PI 控制下的速度明顯出現抖動,而滑模和負載前饋補償的控制下,擾動明顯降低,轉速穩定在3 000 r/min。
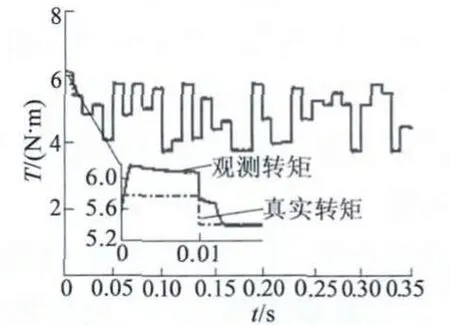
圖3 模糊控制器結構
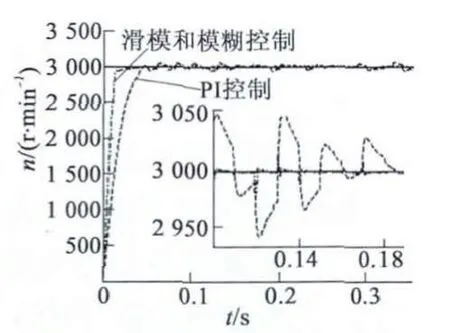
圖4 與PI 的速度曲線對比
圖5 是在滑模和模糊前饋控制下的電流波形。圖中表示負載變化調節輸出補償電流。從圖5 中電流補償可以看出,當負載變化時,補償電流能夠及時消除負載擾動變化帶來的影響,但是沒有從根本上消除負載的擾動。
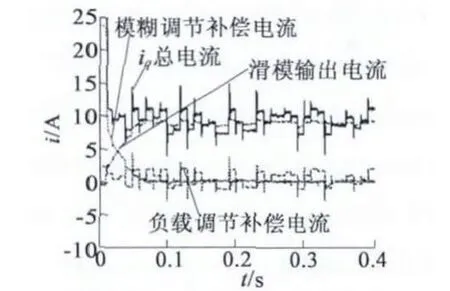
圖5 iq 電流補償曲線
4.2 實驗分析研究
為了驗證負載觀測器的準確性和模糊前饋補償的可行性,搭建了如圖6 所示的實驗平臺。永磁同步電動機采用自行設計的面裝式永磁同步電動機。控制器以DSP2812 為控制核心,采用D/A 以及A/D電路進行模擬量采集和輸出。
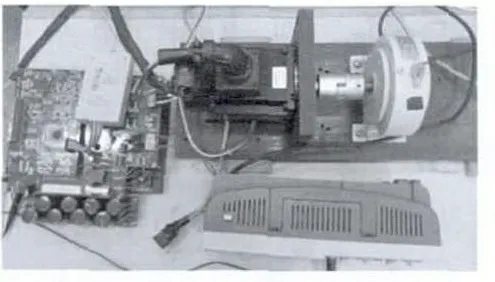
圖6 實驗設備實物圖
采用本文設計的轉矩觀測結果如圖7 所示,其中通道3 是通過磁粉制動器外部施加的轉矩擾動,擾動幅值在1.2 N·m,通道4 是轉矩觀測器的總輸出轉矩波形。試驗結果表明,轉矩觀測器能夠快速準確地跟蹤轉矩擾動的變化,這與仿真結果相吻合。
對于補償的轉速波動,從試驗結果可以看出,傳統的PI 控制在加入比較大的負載擾動時,轉速波動很大,抖動接近500 r/min;在負載前饋的模糊滑模控制下,轉速穩定在3 000 r/min,抖動在20 r/min,控制效果明顯優于PI 控制。
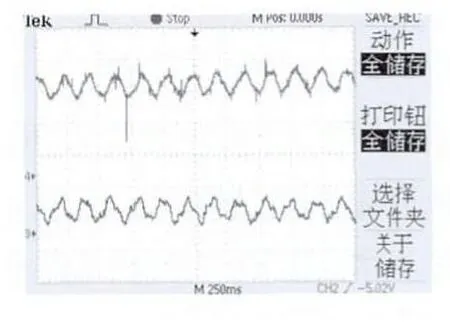
圖7 轉矩觀測試驗結果(截圖)
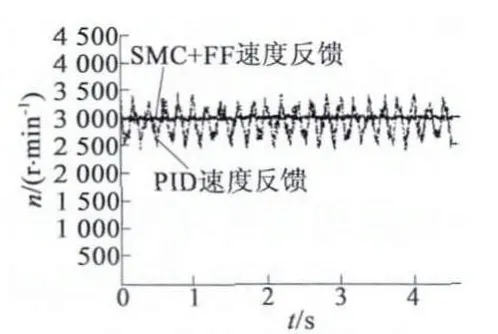
圖8 轉速波形試驗結果
5 結 語
本文將滑模和模糊控制結合設計了基于模糊前饋的模糊滑模控制器,并且設計了轉矩負載觀測器,將其應用到模糊前饋補償中,該方法對于負載擾動比較大的工作環境中能夠降低轉速脈動,使永磁同步電動機速度保持良好的魯棒性。從仿真和實驗結果可以看出該方法的有效性,與傳統方法相比控制效果好,只需在軟件中修改控制策略,無需增加硬件成本,方法簡單,便于工程實現。
[1] 李國勇.智能控制及其MATLAB 實現[M]. 北京:電子工業出版社,2005:194-256.
[2] 李兵強,林輝. 抑制PMSM 周期性轉矩脈動的迭代學習方法[J]. 電機與控制學報,2011,15(9):51-55.
[3] 汪海波,周波,方斯琛,等.永磁同步電動機調速系統的滑模控制[J].電工技術學報,2009,24(9):71-77.
[4] 皇甫宜耿,LAGHROUCHE S,劉衛國,等.高階滑模消抖控制在永磁同步電動機中的應用[J].電機與控制學報,2012,16(2):7-11,18.
[5] 鄭雪梅,李秋明,史宏宇,等.用于永磁同步電動機的一種非奇異高階終端滑模觀測器[J].控制理論與應用,2011,28(10):1467-1472.
[6] CHAOUI H,SICARD P.Adaptive fuzzy logic control of permanent magnet synchronous machines with nonlinear friction[J]. IEEE Trans. on Industrial Electronics,2012,59(2):1123-1133.
[7] SINGH B,SINGH B P,DWIVEDI S.DSP based implementation of fuzzy precompensated PI speed controller for vector controlled PMSM drive[C]//IEEE Conference on Industrial Electronics &Appl.,2006:1-6.
[8] 王久和.交流電動機的非線性控制[M]. 北京:電子工業出版社,2009.
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04
