多自由度超聲電機(jī)優(yōu)化設(shè)計及在x-y平臺的應(yīng)用*
2015-01-12 05:41:24吳文才劉衛(wèi)東南京航空航天大學(xué)機(jī)械結(jié)構(gòu)力學(xué)及控制國家重點實驗室南京210016
振動、測試與診斷 2015年4期
朱 華,吳文才,劉衛(wèi)東,潘 松(南京航空航天大學(xué)機(jī)械結(jié)構(gòu)力學(xué)及控制國家重點實驗室 南京,210016)
多自由度超聲電機(jī)優(yōu)化設(shè)計及在x-y平臺的應(yīng)用*
朱 華,吳文才,劉衛(wèi)東,潘 松
(南京航空航天大學(xué)機(jī)械結(jié)構(gòu)力學(xué)及控制國家重點實驗室 南京,210016)
為了探索和快速實現(xiàn)多自由度超聲電機(jī)的設(shè)計及應(yīng)用,提出一種錐型結(jié)構(gòu)的多自由度超聲電機(jī)。該電機(jī)定子采用單足驅(qū)動方式,利用四分區(qū)的疊層壓電陶瓷作為激勵元件,分析其產(chǎn)生兩維直線運(yùn)動的驅(qū)動機(jī)理。利用有限元軟件ANSYS對電機(jī)建立參數(shù)化模型,并導(dǎo)入到多學(xué)科優(yōu)化軟件Optimus中進(jìn)行全局優(yōu)化求解。優(yōu)化結(jié)果表明,電機(jī)多個設(shè)計目標(biāo)都得以實現(xiàn),最后制作實驗樣機(jī)并成功應(yīng)用在x-y平臺上。
超聲電機(jī);多自由度;優(yōu)化設(shè)計;Optimus;x-y平臺
引 言
多自由度超聲電機(jī)作為超聲電機(jī)的一個分支,是在單自由度超聲電機(jī)的基礎(chǔ)上發(fā)展起來的一種新型電機(jī)。自20世紀(jì)90年代開始成為新型超聲電機(jī)的研究熱點,已有各種形式的電機(jī)結(jié)構(gòu)被不斷研發(fā)出來,如國內(nèi)學(xué)者提出的圓柱-球體多自由度超聲電機(jī)[1]、四定子多自由度超聲電機(jī)[2]、方尖塔型二自由度超聲電機(jī)[3]。日本學(xué)者提出的多自由度球面超聲電機(jī)模組[4],立陶宛學(xué)者提出的4個縱振振子組成的二自由度超聲電機(jī)定子[5],而后又發(fā)展出更緊湊的單定子型結(jié)構(gòu)[6]。
目前,單自由度超聲電機(jī)在一維旋轉(zhuǎn)及直線運(yùn)動領(lǐng)域的應(yīng)用相對較成熟。隨著科技的發(fā)展,精密裝置對驅(qū)動的要求越來越高,若每個自由度的運(yùn)動都由一臺單自由度電機(jī)來完成,這必然造成機(jī)構(gòu)復(fù)雜、體積龐大、動態(tài)性能差等不利因素。因而,研制出性能良好、功能齊全的單一電機(jī)來完成多個自由度的驅(qū)動輸出顯得尤為迫切。
在直線平臺領(lǐng)域,常見的兩自由度x-y平臺多為采用兩臺電機(jī)分別驅(qū)動負(fù)載沿x向?qū)к壓蛓向?qū)к夁\(yùn)動[7],或是兩臺電機(jī)分別驅(qū)動平行滑塊作水平運(yùn)動,再通過連桿帶動中間頭作平面軌跡運(yùn)動[8]。由于兩臺電機(jī)分別驅(qū)動,難以做到實時聯(lián)動定位,尤其是傳動機(jī)構(gòu)的限制,難以向微型化方面發(fā)展。
針對上述存在的不足,筆者在研究錐形多自由度超聲電機(jī)定子結(jié)構(gòu)的基礎(chǔ)上,將其結(jié)構(gòu)參數(shù)作了系統(tǒng)的仿真及參數(shù)優(yōu)化[9],加工出實驗樣機(jī),采用有別于傳統(tǒng)的電機(jī)定子固定的夾持方式[10],讓平板(動子)固定不動,而電機(jī)定子支撐板與兩維導(dǎo)軌連接在一起,實現(xiàn)電機(jī)定子在x-y平臺上的自由運(yùn)動。
本研究方法相比于傳統(tǒng)超聲電機(jī)驅(qū)動方式,行程得到有效拓展,活動更加靈活自如,克服了傳動機(jī)構(gòu)的死角限制,方便驅(qū)動控制實現(xiàn)實時聯(lián)動定位,簡化驅(qū)動電路設(shè)計,以更小的體積實現(xiàn)傳統(tǒng)平臺的二維驅(qū)動功能。
1 電機(jī)工作原理
1.1 結(jié)構(gòu)模型及驅(qū)動原理
圖1為多自由度超聲電機(jī)定子結(jié)構(gòu)簡圖。定子由錐型頭、支撐板、疊層壓電陶瓷、下配重及預(yù)緊螺栓組成。其中:疊層壓電陶瓷采用四分區(qū)結(jié)構(gòu)沿z軸厚度方向極化,電機(jī)定子的工作模態(tài)為空間上兩個正交的二階彎振模態(tài)及一階縱振模態(tài),當(dāng)同時激勵出電機(jī)定子在x-z平面的彎振模態(tài)B2-x與沿z軸的縱振模態(tài)L1-z,可驅(qū)動壓在其上的平板動子沿x軸方向作直線運(yùn)動,如圖2所示。同理,當(dāng)同時激勵出電機(jī)定子在y-z平面的二階彎振模態(tài)B2-y與沿z軸的縱振模態(tài)L1-z,可驅(qū)動壓在其上的平板動子沿y軸方向作直線運(yùn)動。
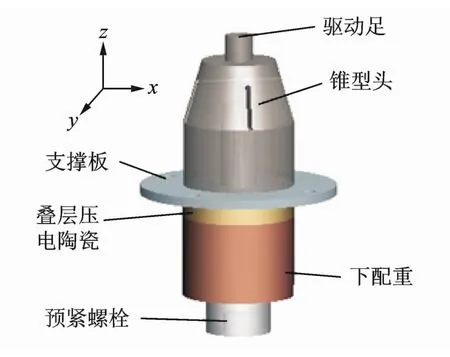
圖1 電機(jī)結(jié)構(gòu)簡圖Fig.1 The structure of motor diagram
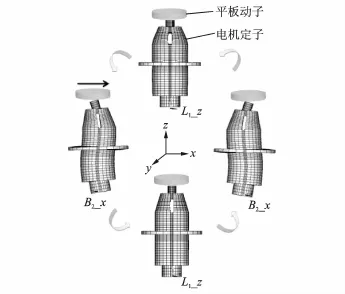
圖2 定子在x-z平面的工作模態(tài)Fig.2 The working mode of stator in x-z plane
1.2 陶瓷片結(jié)構(gòu)及對激勵信號的要求
疊層壓電陶瓷整體尺寸外徑×內(nèi)徑×厚度為12 mm×5.5 mm×2.5 mm,實物如圖3(a)所示,電氣特性如圖3(b)所示。4個正極分區(qū)分別接正弦激勵信號,負(fù)極端接信號的地極。
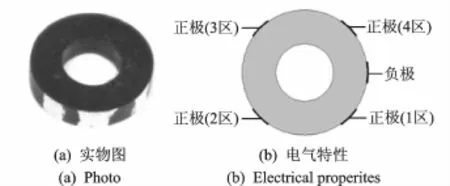
圖3 疊層壓電陶瓷及其電氣特性Fig.3 Laminated piezoelectric ceramics and its electrical properties
假設(shè)疊層壓電陶瓷片各電極分區(qū)分別以A,B,C,D作標(biāo)記。當(dāng)對A,B及C,D分別加sinωt,sinωt,cosωt,cosωt正弦信號激勵時,可激發(fā)出驅(qū)動足沿x-z平面逆時針方向橢圓運(yùn)動軌跡,進(jìn)而驅(qū)動電機(jī)定子沿x軸負(fù)方向運(yùn)動,如圖4(a)所示。切換A,B及C,D所加正弦信號相位差,可驅(qū)動電機(jī)定子沿x軸正方向運(yùn)動,如圖4(b)所示。當(dāng)對A,D 及B,C分別加sinωt,sinωt,cosωt,cosωt正弦信號激勵時,可激發(fā)出驅(qū)動足沿y-z平面逆時針方向橢圓運(yùn)動軌跡,進(jìn)而驅(qū)動電機(jī)定子沿y軸負(fù)方向運(yùn)動,如圖4(c)所示。切換A,D及B,C所加正弦信號相位差,可驅(qū)動電機(jī)定子沿y軸正方向運(yùn)動,如圖4(d)所示。
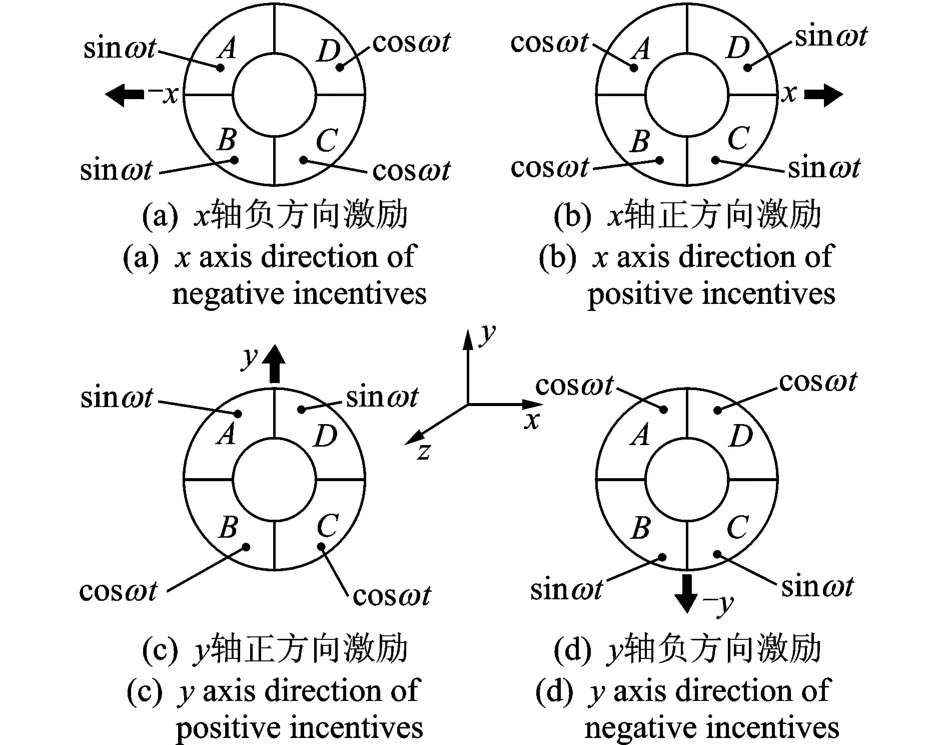
圖4 疊層壓電陶瓷的不同激勵方式Fig.4 Stacked piezoelectric ceramics with different incentives
2 多自由超聲電機(jī)有限元模型
在ANSYS13.0軟件中建立起多自由度超聲電機(jī)的1/4映射網(wǎng)格模型,如圖5所示。利用APDL語言對定子各個尺寸作全參數(shù)化設(shè)計,如圖6所示。考慮到定子的散熱、耐磨性、支撐剛度、加工難易性及選擇合適驅(qū)動頻率段的要求,錐型頭及下配重材料選擇磷青銅,支撐板材料選擇45號鋼,預(yù)緊螺栓選擇M4內(nèi)六角,材料為304不銹鋼,疊層陶瓷片材料為PZT-8。在ANSYS仿真模型中,錐型頭、下配重、支撐板及預(yù)緊螺栓選用Solid45單元;疊層陶瓷片選擇Solid5壓電單元。
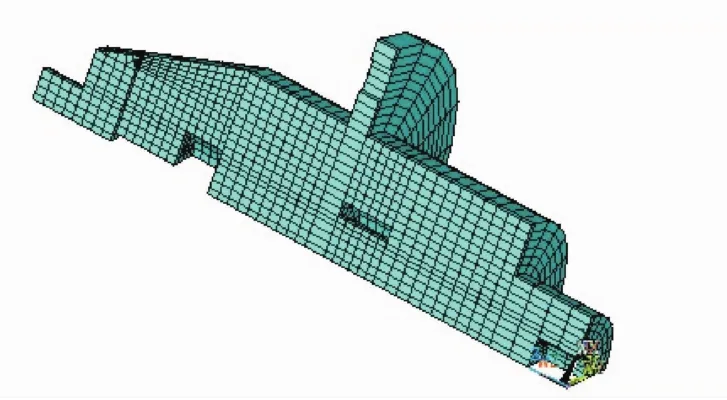
圖5 定子1/4映射網(wǎng)格模型Fig.5 The 1/4 mapped mesh modal of stator
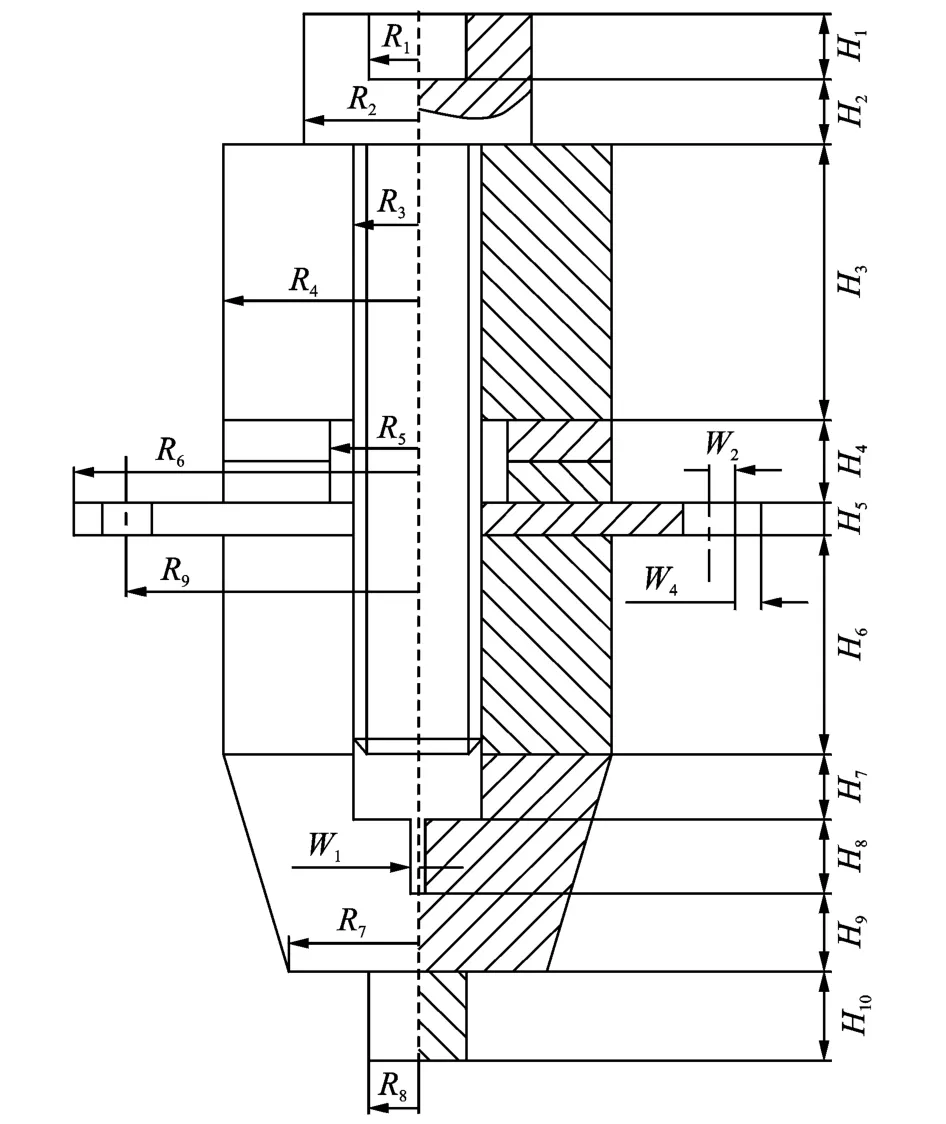
圖6 定子參數(shù)化模型Fig.6 The parameterized model of stator
由于陶瓷片的尺寸制約著定子整體的結(jié)構(gòu)尺寸,因而定子全參數(shù)化設(shè)計是以陶瓷片的尺寸為基準(zhǔn),進(jìn)而構(gòu)建定子整個結(jié)構(gòu)尺寸參數(shù)。由前面對陶瓷片的說明可知,陶瓷片外徑R4=6、內(nèi)徑R5= 2.75及厚度H4=2.5固定不變;M4內(nèi)六角螺栓尺寸R1=1.5,R2=3.5,R3=2,H1=2,H2=2固定不變,而螺栓長度為H3,H4,H5,H6之和。考慮到映射分網(wǎng)的方便,錐面W1為方槽;尺寸R8=1.5固定不變;支撐板安裝孔徑W2=0.8也不變。實際參數(shù)優(yōu)化尺寸總共11個,分別為H3,H5,H6,H10,R9,W1,H7,H8,H9,R7,W4。
3 Optimus集成優(yōu)化
Optimus是Noesis Solution公司開發(fā)的過程集成和多學(xué)科協(xié)同優(yōu)化設(shè)計軟件,能集成ANSYS仿真工具,實現(xiàn)仿真流程自動化。Optimus允許用戶以圖形化的方式建立工作流,并在工作流中定義輸入文件、輸出文件、輸入?yún)?shù)、輸出參數(shù)、所需調(diào)用的分析工具及各控件在流程中的邏輯關(guān)系。
Optimus軟件平臺中,集成了多種全局優(yōu)化算法,如Self-Adaptive Evolution(可進(jìn)化自適應(yīng)遺傳算法)、Differential Evolution(差分進(jìn)化算法)、simulated annealing(模擬退火算法)等[11]。全局優(yōu)化算法能夠同時考察設(shè)計空間中的參數(shù)變量,相比局部優(yōu)化算法更易達(dá)到全局最優(yōu)解。因此,多自由度超聲電機(jī)優(yōu)化設(shè)計選擇的是Optimus的全局優(yōu)化算法。
3.1 參數(shù)變量及變化范圍的定義
考慮到電機(jī)合適的工作頻率范圍、機(jī)加工及裝配的可行性、ANSYS映射分網(wǎng)的完整性,擬定圖6中各設(shè)計變量的初值及連續(xù)變化范圍如表1所示。
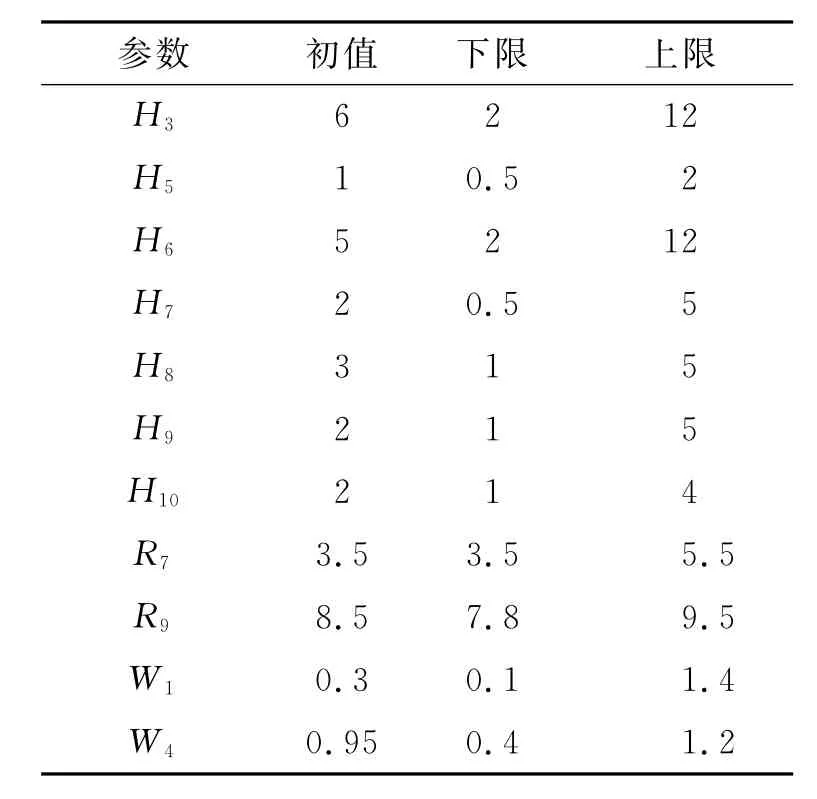
表1 優(yōu)化變量初始尺寸及上下限Fig.1 The initial size of optimization variables and its limits mm
3.2 目標(biāo)函數(shù)定義及優(yōu)化方法選擇
由于多自由度超聲電機(jī)二階彎振模態(tài)在x-z平面與y-z平面的空間對稱性,可以簡化為x-z平面的參數(shù)優(yōu)化為主,兼顧y-z平面優(yōu)化輸出。提取出x-z平面二階彎振B2-x的振型曲線及沿z軸一階縱振L1-z振型曲線,如圖7所示。作為電機(jī)優(yōu)化迭代過程中模態(tài)識別的參考振型,并利用模態(tài)置信準(zhǔn)則MAC法[12],在Optimus自動尋優(yōu)中準(zhǔn)確的識別出L1-z及B2-x振型。具體的參數(shù)優(yōu)化過程以下面8個子目標(biāo)函數(shù)分別加以說明。
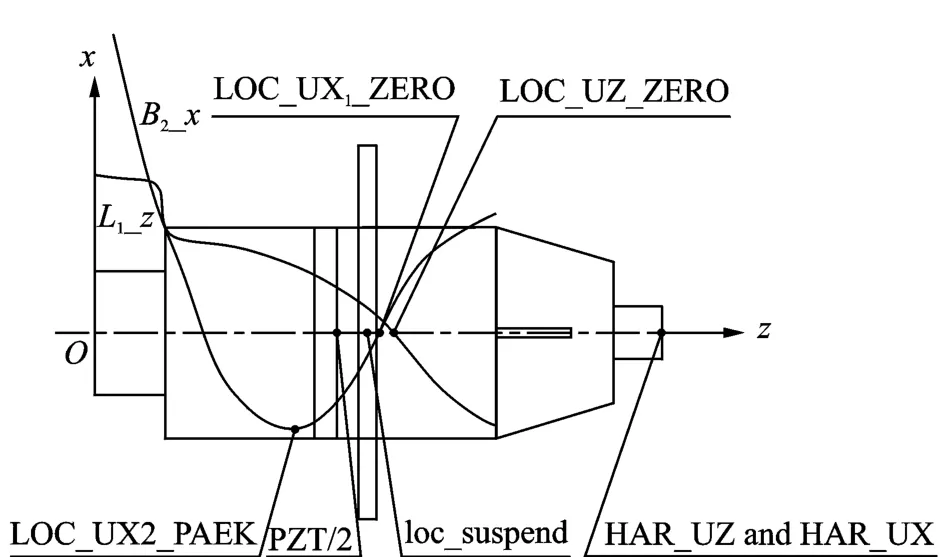
圖7 電機(jī)關(guān)鍵位置及振型Fig.7 The modal shape with key position
1)電機(jī)的二階彎振模態(tài)B2-x,B2-y的工作頻率與一階縱振模態(tài)L1-z的工作頻率應(yīng)盡可能接近,令FRE-MAX,F(xiàn)RE-MIN分別為B2-x,B2-y,L1-z中的最大值與最小值,其子目標(biāo)函數(shù)為

2)電機(jī)較小工作模態(tài)頻率FRE-MIN應(yīng)遠(yuǎn)離前一干擾模態(tài)頻率FRE-FRONT,其子目標(biāo)函數(shù)為

3)電機(jī)較大工作模態(tài)頻率FRE-MAX應(yīng)遠(yuǎn)離后一干擾模態(tài)頻率FRE-REAR,其子目標(biāo)函數(shù)為

4)電機(jī)支撐板的中心位置loc-suspend應(yīng)與二階彎振中間節(jié)點LOC-UX1-ZERO及一階縱振節(jié)點LOC-UZ-ZERO盡量接近,以減少電機(jī)工作時支撐處的能量損失,提高效率。其子目標(biāo)函數(shù)為

5)電機(jī)的陶瓷片加載正弦電壓信號作諧響應(yīng)時,驅(qū)動足沿x軸方向的振幅HAR-UX及沿z軸方向的振幅HAR-UZ都應(yīng)盡可能大,其子目標(biāo)函數(shù)為


7)陶瓷片的中心PZT/2應(yīng)與一階縱振的節(jié)點LOC-UZ-ZERO盡量靠近,以有效激發(fā)縱向振動模態(tài),其子目標(biāo)函數(shù)為

6)在子目標(biāo)(5)中要求驅(qū)動足沿兩個方向振幅盡都可能大的同時,兩者振幅比例應(yīng)趨于相等,即各自所占分量都趨于0.5,其子目標(biāo)函數(shù)為
8)陶瓷片的中心PZT/2應(yīng)與二階彎振的波峰LOC-UX2-PEAK盡量靠近,以有效激發(fā)二階彎振模態(tài),其子目標(biāo)函數(shù)為

上述8個函數(shù)為多目標(biāo)優(yōu)化的子函數(shù),最終優(yōu)化的目的是要使驅(qū)動足在x軸方向及z軸方向的振幅達(dá)到最大。
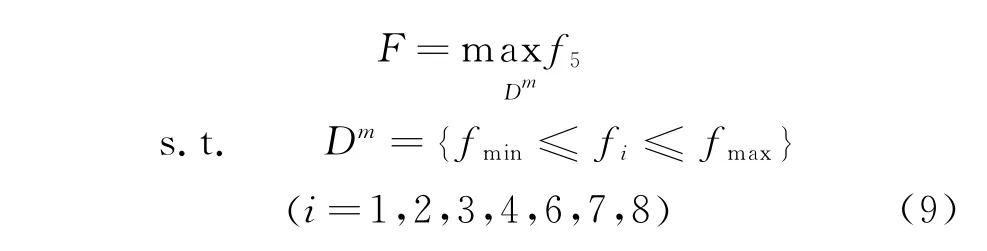
采用主要目標(biāo)法[13],即抓住主要目標(biāo),兼顧其他要求。筆者選擇f5作為主要目標(biāo)函數(shù),其他7個子目標(biāo)函數(shù)分別給予一定的取值范圍,使其轉(zhuǎn)化為新的約束條件,如式(9)所示。通過實踐發(fā)現(xiàn),該方法可操作性強(qiáng),易于導(dǎo)入Optimus軟件中自動尋優(yōu),有效找出全局最優(yōu)解。
3.3 優(yōu)化流程圖
利用ANSYS編寫的APDL語言建立輸入文件76-new-15-UTF.txt及輸出文件OPTOUT0611.TXT。在Optimus工作流中,輸入?yún)?shù)存放在Input Array1數(shù)組控件中,并建立相關(guān)監(jiān)測量如陶瓷片的中心位置PZT/2、支撐板的中心位置loc-suspend等。Optimus通過相應(yīng)優(yōu)化算法來不停地調(diào)用輸入文件,并在輸出文件中導(dǎo)出所需監(jiān)測量與8個子目標(biāo)函數(shù)優(yōu)化結(jié)果,整個優(yōu)化流程如圖8所示。
3.4 優(yōu)化方法及結(jié)果討論
在Optimus中選擇全局優(yōu)化算法Self-Adaptive Evolution進(jìn)行迭代計算。在遺傳算法中,輸入設(shè)計參數(shù)數(shù)量N=11,種群大小為N的4~5倍,筆者將種群大小設(shè)置為50,設(shè)置最大迭代數(shù)量為30,則優(yōu)化的計算總次數(shù)為1 500次。
在尋求主要目標(biāo)函數(shù)f5最大同時應(yīng)兼顧其余7個子目標(biāo)約束函數(shù)f1,f2,f3,f5,f6,f7,f8,折中選擇第1 207次計算數(shù)據(jù)作為本次優(yōu)化的尋優(yōu)結(jié)果,其尺寸參數(shù)優(yōu)化結(jié)果與圓整值如表2所示。對電機(jī)在優(yōu)化前與優(yōu)化后8個子目標(biāo)函數(shù)的提取結(jié)果作對比,如表3所示。其中,優(yōu)化前提取結(jié)果是指在表1的輸入尺寸下,在Optimus作一次單點運(yùn)算(Nominal)所提取結(jié)果。
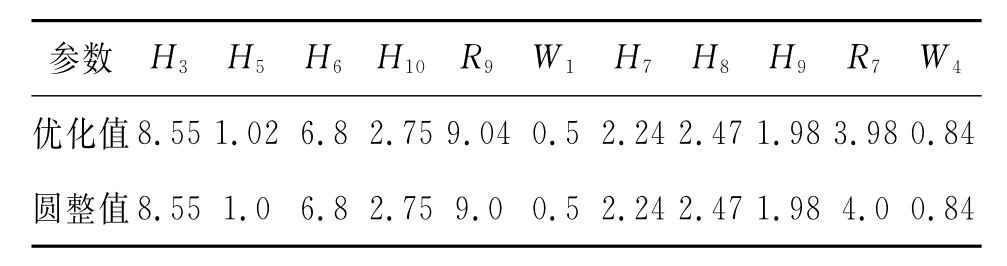
表2 輸入?yún)?shù)優(yōu)化結(jié)果及圓整值Tab.2 The input data derived from Optimization and rounding number mm
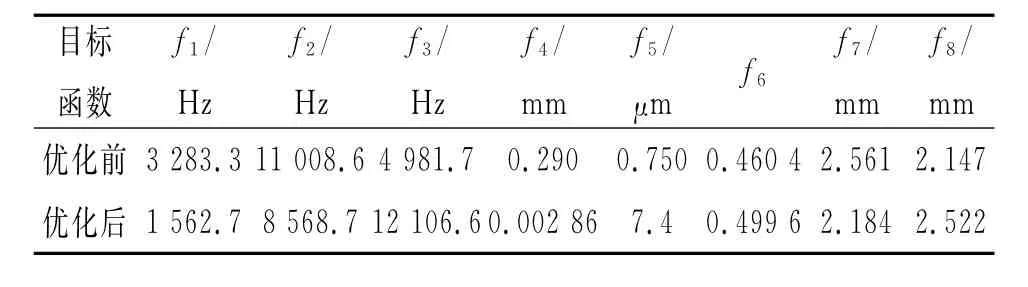
表3 各子目標(biāo)函數(shù)優(yōu)化前后結(jié)果對比Tab.3 Each sub-objective results were present before or after optimization
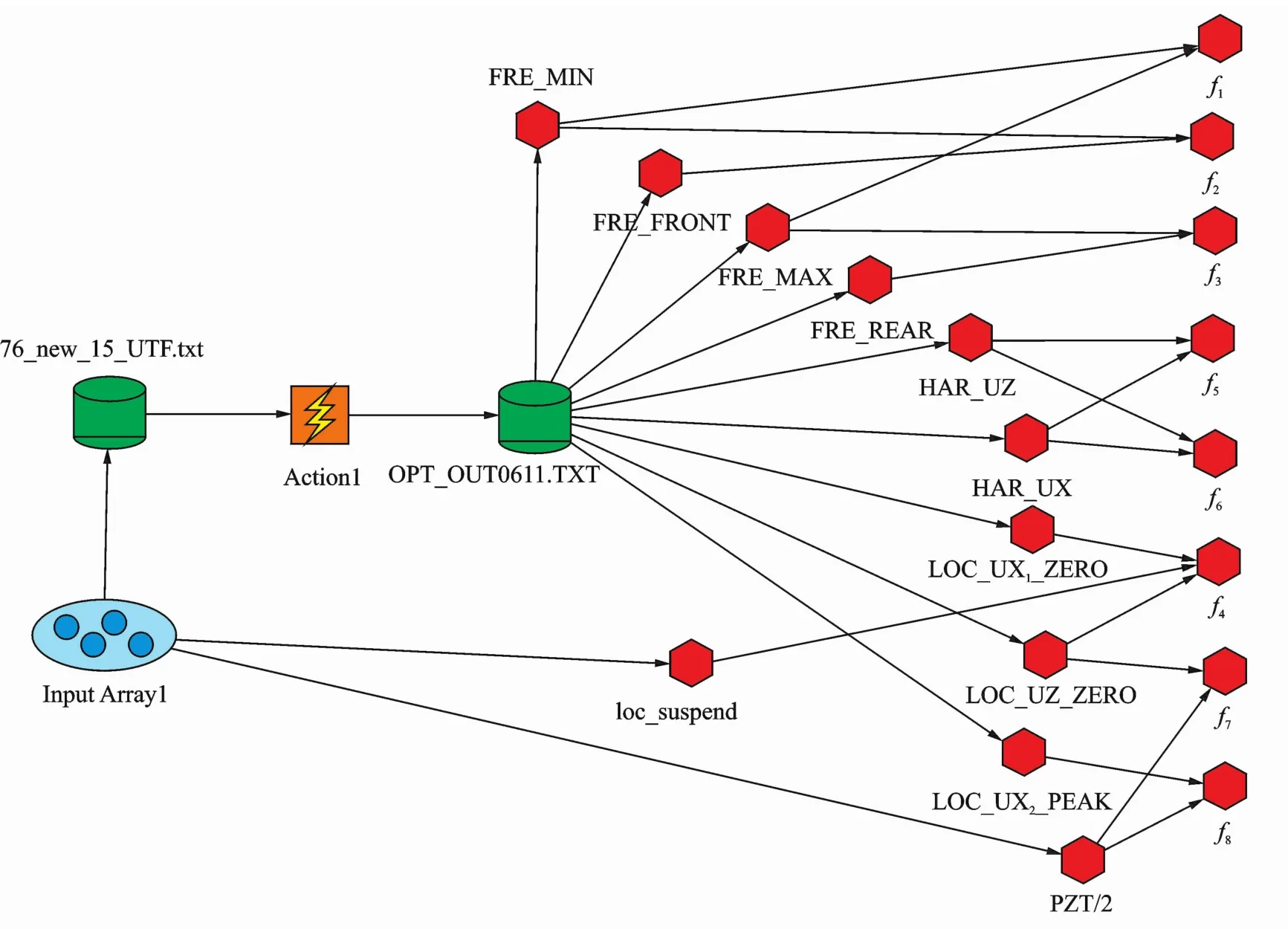
圖8 Optimus中整體流程圖Fig.8 The flow char in Optimus
從表3的優(yōu)化前與優(yōu)化后的數(shù)據(jù)結(jié)果對比可知,電機(jī)驅(qū)動足沿x軸方向與z軸方向的振幅之和f5明顯增大了一個數(shù)量級,且沿x軸方向與沿z軸方向所占分量值f6接近0.5,達(dá)到了主要設(shè)計目標(biāo)。電機(jī)支撐板的中心位置與二階彎振中間節(jié)點及一階縱振節(jié)點位置的重合度指標(biāo)f4比優(yōu)化前降低了兩個數(shù)量級,幾乎趨近于0,有利于電機(jī)應(yīng)用于x-y平臺減少能量耗散及降低對平臺的干擾。同時工作頻率與前后干擾頻率差f2,f3最小達(dá)到8 k Hz以上,有效防止電機(jī)加正弦信號激勵及調(diào)頻調(diào)速時把不期望的干擾模態(tài)激發(fā)出來,不利于電機(jī)的夾持,嚴(yán)重時會產(chǎn)生較大的噪聲干擾。在保證實際應(yīng)用需求的前提下,子目標(biāo)函數(shù)f1,f7,f8變化不大,可以作為次要目標(biāo)考慮。總體而言,優(yōu)化后電機(jī)各項性能得到顯著提高,驗證了模型的正確性及算法的可靠性。
4 樣機(jī)制作和x-y平臺應(yīng)用
4.1 實驗樣機(jī)制作及實驗
加工制作的電機(jī)實物如圖9所示。利用德國Polytec公司的PVS-300F多譜勒激光測振儀對電機(jī)定子進(jìn)行掃頻測振實驗,測得電機(jī)橫向頻響曲線及縱向頻響曲線,如圖10,11所示。與仿真計算結(jié)果進(jìn)行對比,如表4所示。可以看出,仿真計算頻率與實際加工樣機(jī)測振頻率比較接近,在二階彎振處存在最大誤差,達(dá)到400 Hz左右,這與電機(jī)加工裝配和仿真計算兩方面都存在誤差有關(guān)。
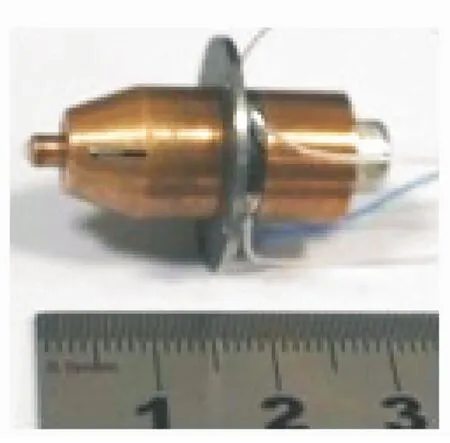
圖9 電機(jī)實物圖Fig.9 The photos of motor
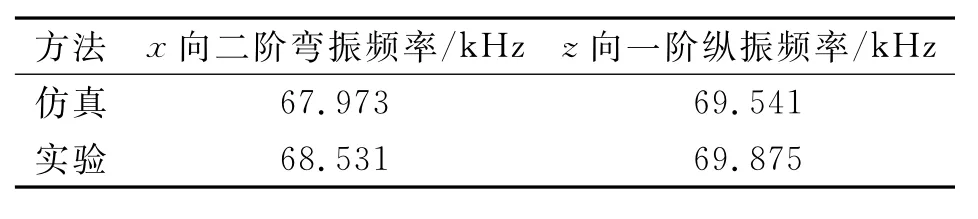
表4 電機(jī)掃頻測試與仿真對比Tab.4 The frequency in sweep experiment and simulation
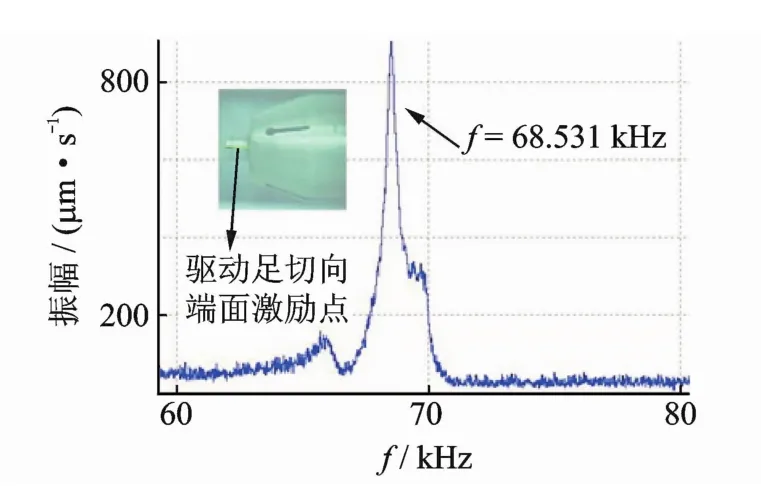
圖10 x向二階彎振頻響曲線Fig.10 The curve of second lateral vibration in x axis

圖11 z向一階縱振頻響曲線Fig.11 The curve of first longitudinal vibration in z axis
4.2 x-y平臺及性能測試
將制作的實驗樣機(jī)裝配到x-y工作平臺上,如圖12所示。傳統(tǒng)多自由度超聲電機(jī)的工作模式是定子固定不動,而動子如直線導(dǎo)軌、旋轉(zhuǎn)球等往復(fù)移動或轉(zhuǎn)動。本工作臺中電機(jī)工作方式與之相反,把多自由度超聲電機(jī)定子通過支撐板裝配在兩自由度導(dǎo)軌上,而下面的氧化鋯摩板固定不動,當(dāng)對定子陶瓷片各分區(qū)分別施加正余弦信號激勵時,驅(qū)動足產(chǎn)生橢圓軌跡,依靠氧化鋯平板對定子的反作用力驅(qū)動其實現(xiàn)沿x軸方向或y軸方向作兩自由度直線運(yùn)動。
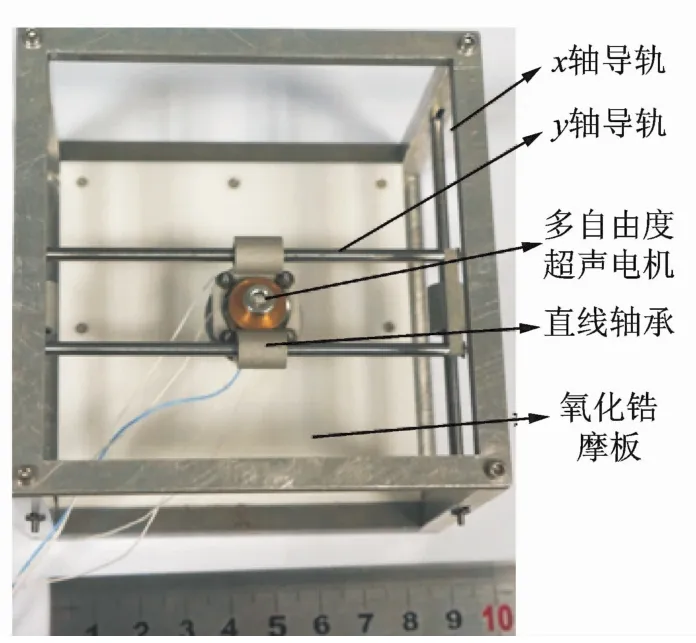
圖12 x-y工作平臺Fig.12 The photos of x-y platform
4.3 電機(jī)在x-y平臺上性能測試
圖13為平臺上電機(jī)沿x軸向及y軸向運(yùn)動性能測試方案。其中,電機(jī)空載線速度v是以測試電機(jī)來回跑10趟所需時間換算得出。加負(fù)載時,由于線速度較慢及同向負(fù)載影響,以電機(jī)帶負(fù)載走一趟所需時間換算出線速度。平臺中電機(jī)x軸向行程S1=58 mm,y軸向行程S2=60.5 mm。當(dāng)驅(qū)動電路給予電機(jī)合適的激勵頻率f(65~70 k Hz)、激勵電壓(峰峰值35~50 V),測出電機(jī)速度v及負(fù)載物重G如表5所示。表5中負(fù)載G為0 N對應(yīng)空載線速度v最大值,隨著負(fù)載G逐漸增大,線速度v趨于0。
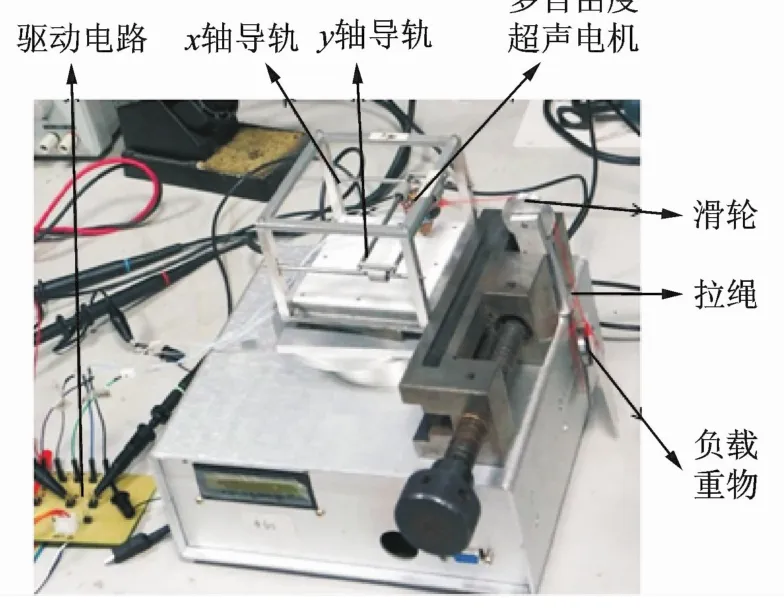
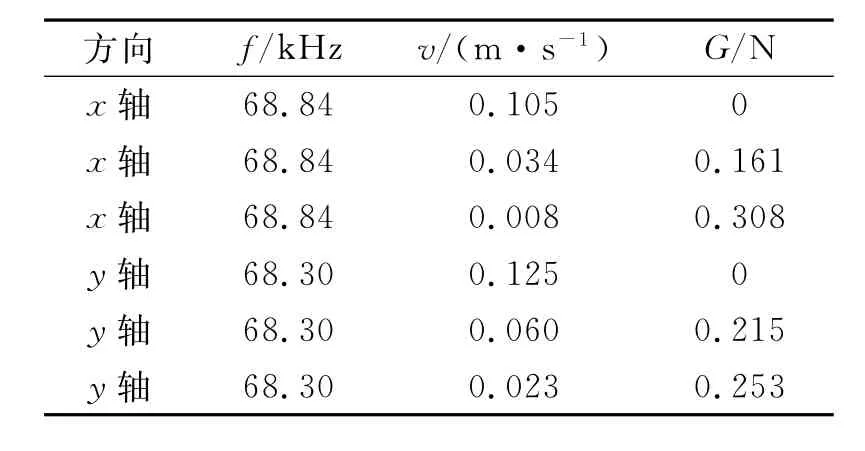
表5 x-y平臺電機(jī)測試結(jié)果Tab.5 The experiment results of x-y platform
5 結(jié)束語
針對多自由度超聲電機(jī)的結(jié)構(gòu)優(yōu)化問題,從驅(qū)動機(jī)制和參數(shù)優(yōu)化模型方面作了系統(tǒng)闡述。在Optimus中應(yīng)用遺傳算法對如何提高電機(jī)驅(qū)動足振幅、減少電機(jī)工作時能量耗散、降低對支撐系統(tǒng)干擾及減小激勵頻率干擾進(jìn)行了研究,得到的優(yōu)化結(jié)果驗證了算法的可靠性。加工出的實驗樣機(jī)創(chuàng)新性地將多自由度超聲電機(jī)成功應(yīng)用于兩自由度的x-y工作平臺上,為多自由度超聲電機(jī)向?qū)嶋H應(yīng)用方面邁出了一步,并為下一階段的x-y平臺行走軌跡控制打下基礎(chǔ)。
[1] Zhao Chunsheng,Li Zhirong,Huang Weiqing.Optimal design on stator of cylinder-sphere 3-DOF ultrasonic motor using structural dynamics method[C]∥Ultrasonics Symposium,2004 IEEE.Nanjing:IEEE,2004,3:2259-2262.
[2] 傅平,郭吉豐,沈潤杰,等.二自由度行波型超聲波電機(jī)的驅(qū)動和運(yùn)動姿態(tài)控制[J].電工技術(shù)學(xué)報,2008,23(2):25-30.Fu Ping,Guo Jifeng,Shen Runjie,et al.Driving circuit and position control system of two degree-of-freedom spherical traveling-wave type ultrasonic motor [J].Transactions of China Electrotechnical Society,2008,23(2):25-30.(in Chinese)
[3] 金家楣,張建輝,趙淳生.新型方尖塔形定子二自由度超聲電機(jī)的結(jié)構(gòu)設(shè)計、驅(qū)動機(jī)理與性能研究[J].振動與沖擊,2009,28(12):63-67.Jin Jiamei,Zhang Jianhui,Zhao Chunsheng.Research on construction,principle,and performances of a novel two-degrees of freedom ultrasonic motor with an obelisk stator[J].Journal of Vibration and Shock,2009,28(12):63-67.(in Chinese)
[4] Mashimo T,Awaga K,Toyama S.Development of a spherical ultrasonic motor with an attitude sensing system using optical fibers[C]∥Robotics and Automation,2007 IEEE International Conference on.Roma,Italy:IEEE,2007:4466-4471.
[5] Vasiljev P,Borodinas S,Yoon S J,et al.The actuator for micro moving of a body in a plane[J].Materials Chemistry and Physics,2005,91(1):237-242.
[6] Vasiljev P,Borodinas S,Mazeika D,et al.Investigation of the multipurpose piezoelectric actuator[C]∥Proceedings of the Second International Workshop on Piezoelectric Materials and Applications in Actuators.Paderborn:Heinz Nixdorf Institute,2006:339-408.
[7] 張健滔,朱華,趙淳生.桿式超聲電機(jī)在精密平臺上的應(yīng)用[J].中國機(jī)械工程,2011,15(22):1842-1846.Zhang Jiantao,Zhu Hua,Zhao Chunsheng.Precision positioning stage using rod shape rotary ultrasonic motors[J].China Mechanical Engineering,2011,15(22):1842-1846.(in Chinese)
[8] Sun Shuwen,Wu Na,Zheng Gang,et al.Research and implementation on control technology of plane two-DOF dual-truck parallel mechanism[C]∥Mechatronics and Automation(ICMA),2011 International Conference on.Beijing:IEEE,2011:1682-1687.
[9] 時運(yùn)來,趙淳生.蝶形直線超聲電機(jī)優(yōu)化設(shè)計[J].振動、測試與診斷,2012,32(6):883-891.Shi Yunlai,Zhao Chunsheng.Application of response surface methodology for optimization of butterflyshaped linear ultrasonic motor[J].Journal of Vibration,Measurement&Diagnosis,2012,32(6):883-891.(in Chinese)
[10]姚志遠(yuǎn),趙妹淳,江超,等.扇形直線超聲電機(jī)的結(jié)構(gòu)設(shè)計[J].振動、測試與診斷,2013,33(1):40-43.Yao Zhiyuan,Zhao Meichun,Jiang Chao,et al.Structural design on linear ultrasonic motor with fanshaped stator[J].Journal of Vibration,Measurement &Diagnosis,2013,33(1):40-43.(in Chinese)
[11]王雪梅,王義和.模擬退火算法與遺傳算法的結(jié)合[J].計算機(jī)學(xué)報,1997,20(4):381-384.Wang Xuemei,Wang Yihe.The combination of simulated annealing and genetic algorithms[J].Journal of Chinese Computers,1997,20(4):381-384.(in Chinese)
[12]Allemang R J,Brown D L.A correlation coefficient for modal vector analysis[C]∥Proceedings of the 1st International Modal Analysis Conference.Orlando:[s.n.],1982:110-116.
[13]王國強(qiáng),趙凱軍,崔國華.機(jī)械優(yōu)化設(shè)計[M].北京:機(jī)械工業(yè)出版社,2009:160-180.

TM356;TH122
10.16450/j.cnki.issn.1004-6801.2015.04.002
朱華,男,1978年8月生,副研究員。主要研究方向為壓電精密驅(qū)動元件與系統(tǒng)(包含超聲電機(jī))的樣機(jī)開發(fā)、機(jī)理分析與優(yōu)化設(shè)計、驅(qū)動與控制、壓電作動器件產(chǎn)業(yè)標(biāo)準(zhǔn)化與質(zhì)量控制體系等研究與生產(chǎn)工作。曾發(fā)表《一種微型柱體超聲電機(jī)的研究》(《中國電機(jī)工程學(xué)報》2006年第26卷第12期)等論文。
E-mail:hzhu103@nuaa.edu.cn
*南京航空航天大學(xué)基本科研業(yè)務(wù)費(fèi)專項科研資助項目(NS2010034);南京航空航天大學(xué)科研基地創(chuàng)新創(chuàng)優(yōu)基金資助項目(NJ20120002);航空科學(xué)基金資助項目(20100112005);江蘇高校優(yōu)勢學(xué)科建設(shè)工程資助項目
2014-02-28;
2014-03-24
猜你喜歡
房地產(chǎn)導(dǎo)刊(2022年5期)2022-06-01 06:20:14
建材發(fā)展導(dǎo)向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導(dǎo)向(2021年7期)2021-07-16 07:07:52
中學(xué)生數(shù)理化(高中版.高二數(shù)學(xué))(2021年12期)2021-04-26 07:43:48
中學(xué)生數(shù)理化(高中版.高考數(shù)學(xué))(2021年12期)2021-03-08 01:28:50
廣西科技大學(xué)學(xué)報(2016年1期)2016-06-22 13:10:37
湖北經(jīng)濟(jì)學(xué)院學(xué)報·人文社科版(2015年8期)2015-12-29 05:53:07
航空學(xué)報(2015年4期)2015-05-07 06:43:35
現(xiàn)代企業(yè)(2015年2期)2015-02-28 18:45:09
上海電機(jī)學(xué)院學(xué)報(2015年4期)2015-02-28 14:30:00