某型電子節氣門PID模糊控制系統仿真分析
2015-01-09 01:48:58侯麗春
汽車技術 2015年11期
侯麗春
(長春汽車工業高等專科學校)
某型電子節氣門PID模糊控制系統仿真分析
侯麗春
(長春汽車工業高等專科學校)
在Matlab中建立電子節氣門數學模型,聯合模糊控制和PID控制器等搭建PID+前饋控制系統和模糊PID+前饋控制系統,對電子節氣門目標大開度和較小開度兩種情況的階躍響應進行仿真分析。仿真結果表明,一定條件下模糊PID+前饋控制系統響應速度低于PID+前饋控制系統響應速度,但是模糊PID+前饋控制系統控制穩定,控制精度、準確度上要優于后者。
1 電子節氣門結構模型
隨著電子及控制技術的發展,電子節氣門技術已經較廣泛的應用在中高級發動機上。優良的參數控制算法是精確控制和系統反應的基礎,其可以提高燃油經濟性,降低排放污染[1],并可結合整車工況實現安全操控整車運行,是電子節氣門技術不可缺少的研究內容。某型電子節氣門控制系統(Electronic Throttle Control System, ETCS)主要由加速踏板、節氣門、驅動電路、控制單元及相關傳感器等部分構成,如圖1所示。在MATLAB/Simu?link中建立電子節氣門仿真模型,以進行控制算法研究。
2 PID控制系統及模糊控制系統搭建[2、3]
PID控制在應用中需先做出測量和目標比較再進行系統糾正,是一種應用最為廣泛的控制方法,是按系統偏差比例、積分、微分線性組合進行控制輸出量對控制對象進行控制[2]。節氣門系統離散化方程為:
式中,n表示采樣序號;u(n)表示第n次采樣時刻PID控制器的輸出值;e(n)表示第n次采樣時刻系統設定值和實際值的差值;Kp為控制器比例常數;Ki=Kp/Ti為控制器的積分常數,Ti為積分時間;Kd=Kp·Td為控制器的微分系數,Td為微分時間;θt(n)為駕駛員需求的節氣門開度;θ(n)為節氣門的實際開度值。
由于PID在控制時變、耦合、非線性上以及結構不確定的系統控制時顯示出其局限性,所以一般在控制復雜系統時采用PID和其它算法控制相結合的方式。
模糊控制系統是以模糊數學、模糊語言形式的知識表示,以模糊邏輯的規則推理為理論基礎,采用計算機控制技術構成的一種具有反饋通道的閉環控制系統,其組成核心是具有智能性的模糊控制器。對其中模糊控制器中的參數設定TPS電壓偏差E和偏差變化率EC的基本論域取為[-6,6],并將其分成7個模糊集合,分別是NL、NM、NS、ZO、PS、PM、PL。實際控制中電子節氣門開度對應的傳感器電壓值偏差,故標定因子ke取1.2。TPS電壓值偏差變化率V/s,標定因子kec取0.2。語言變量的隸屬函數選擇靈敏度較高、算法簡單的三角形函數。在輸出變量中,系統控制參數Kc的論域取[8,18],Ti的論域取[6,20],Td的論域取[6,16],并將其分成3個集合,分別是小(S),中(M),大(L)。其中控制系數Kc的實際輸出范圍為[8,18],所以Kc的標定因子kKc取1,Ti的實際輸出范圍為[0.006,0.020],所以Ti的標定因子kTi取0.001;Td的實際輸出范圍為[0.0008,0.0016],所以Td的標定因子kTd取0.0001。系統的Kc、Ti、Td的隸屬函數均取為三角形函數,在MATLAB/Simulink中建立PID控制及模糊控制器的Simulink結構仿真模型,圖2為E、EC的隸屬度函數,圖3~圖5為Ti、Kc、Td隸屬度函數曲線。
為了使ETCS獲得較快的響應速度、較好的穩定性以及較小的超調量,制定不同偏差和偏差變化率下的PID控制參數整定原則[4、5]:
a.當|E|較大、EC較小或者為0時,為了保證系統具有良好的隨動性,應迅速減小誤差,可選取較大的Kc,同時為了避免較大超調量的出現,應選取中等的Ti和較小的Td。
b.若E·EC>0,說明系統正處于誤差逐漸減小的狀態。若|E|較大,可以選取較大的Kc、較小的Ti和中等的Td,這樣可以使系統在短時間內減小偏差E,而且保證系統的穩態特性;若|E|較小,考慮到系統穩態特性要求,只要進行較小的PID控制,可以選取中等的Kc,較大的Ti和較小的Td。
c.若E·EC<0,說明系統正處于誤差逐漸增大的狀態。若|E|較大,則不僅需要盡快減小|E|,而且要盡快改變偏差變化的趨勢,此時應該選取較大的Kc、較小的Ti和較小的Td;若|E|較小,只需要考慮改變偏差的變化趨勢,可以選取中等的Kc、中等的Ti和較小的Td。
根據以上分析,建立PID控制參數Kc、Ti、Td的模糊控制規則表,如表1所示。
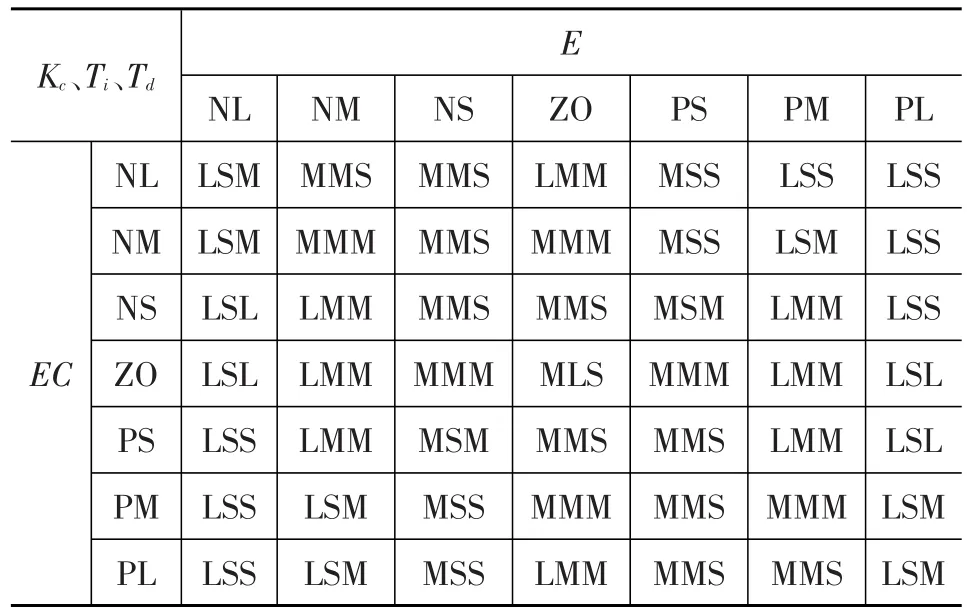
表1 模糊PID控制系統控制規則表
在MATLAB/Simulink中,獲得輸出曲面Kc、Ti、Td模糊后的三維立體圖,分別如圖6~圖8所示。
3 階躍響應Simulink仿真結果
在MATLAB/Simulink中建立模糊系統的仿真模型、前饋控制器仿真模型,將PID控制仿真模型與前饋控制器仿真模型兩者相結合,或者將PID控制仿真模型與模糊控制器、前饋控制器3者結合,再連接電子節氣門模型,整個ETCS綜合Simulink仿真模型便搭建完成。模型搭建完成后,首先進行節氣門閥片目標開度從6°階躍變化到86°的ETCS仿真,其結果如圖9所示。
從圖9可以看出,在接收到階躍信號的激勵后,PID+前饋控制響應更為迅速,在受到激勵70 ms后便可達到目標開度的90%(77.5°),在125 ms后便可達到穩定狀態,但是在穩定周期內出現超調,超調量約為0.8°。而使用模糊PID+前饋控制響應較慢,在76 ms之后才能達到目標開度的90%,穩定時間和PID+前饋控制相同,均為125 ms,但穩定周期內無超調現象。
圖10是節氣門閥片目標開度從86°階躍變化到6°的ETCS仿真結果。
從圖10可以看出,采用PID+前饋控制的電子節氣門響應更為迅速,受到激勵后55 ms便可達到節氣門目標開度的90%(14°),穩定周期約為110 ms,但在穩定周期內出現超調,超調量約為3°。采用模糊PID+前饋控制的電子節氣門響應速度較慢,在70 ms后達到目標開度的90%,穩定周期同樣為110 ms,周期內無超調現象。
再次進行小角度(7°-11°)仿真分析,其結果如圖11所示。
從圖11可以看出,采用PID+前饋控制的電子節氣門響應速度較快,在16 ms后便可達到目標開度,在周期內出現超調,超調量約為1.6°,整個穩定周期約為65 ms。采用模糊PID+前饋控制的電子節氣門響應速度較慢,在30 ms后達到目標開度,在周期內也出現超調,超調量較小,約為0.1°,整個穩定周期約為65 ms。
電子節氣門開度從11°變化到7°時,兩種控制方式的曲線變化如圖12所示。
從圖12可以看出,采用PID+前饋控制的電子節氣門響應速度較快,到達目標開度90%(7.4°)的時間約為18 ms,在25 ms后到達目標開度,之后出現超調,超調量略小于0.2°,整個穩定周期約為70 ms。采用模糊PID+前饋控制的電子節氣門的相應速度較慢,到達目標開度90%的時間約為22 ms,在30 ms后到達目標開度,也出現了超調,超調量較小約為0.08°,整個穩定周期約為70 ms。
4 結束語
a.無論是在電子節氣門目標開度變化較大還是變化較小的情況下,采用PID+前饋控制方式的響應速度都比采用模糊PID+前饋控制的方式快,在電子節氣門目標開度變化較大的情況下表現的更加明顯。
b.無論是在電子節氣門目標開度變化較大還是變化較小的情況下,采用模糊PID+前饋控制方式的超調量均要小于采用PID+前饋控制方式,在目標開度較大的情況下,采用模糊PID+前饋控制的超調量甚至為0。
c.電子節氣門采用PID+前饋控制方式和采用模糊PID+前饋控制方式,其響應的穩定周期大致相同。
d.在電子節氣門目標開度變化量相同的情況下,從開度較小變化到開度較大的響應時間要比從開度較大到開度較小的響應時間長。
1 林學東,王霆.車用發動機電子控制技術.北京:機械工業出版社,2008.
2 楊振東.基于模糊PID電子節氣門控制系統的研究與開發:[學位論文].長沙:湖南大學,2008.
3 席愛民.模糊控制技術.西安:西安電子科技大學出版社,2008.
4 石辛民.模糊控制及其MATLAB仿真.北京:清華大學出版社,2008.
5 毛亞峰.基于MATLAB/Simulink的電子節氣門控制系統仿真:[學位論文].西安:長安大學,2012.
(責任編輯晨 曦)
修改稿收到日期為2015年8月1日。
Simulative Analysis of an Electronic Throttle PID Fuzzy Control System
Hou Lichun
(Changchun Automotive Industry Institute)
A mathematics electronic throttle model is built in Matlab,with joint fuzzy control and PID controller, etc.,PID+feedforward control system and fuzzy PID+feedforward control system are built to simulate and analyze the step response of wide-open-throttle and narrow-open-throttle.The results of simulation show that,under certain conditions, response rate of fuzzy PID+feedforward control system is slower than that of PID+feedforward control system,however,the former control stably with better control accuracy and precision than the later.
Electronic throttle,PID+Feedforward control system,Fuzzy PID+Feedforward control system
電子節氣門 PID+前饋控制系統 模糊PID+前饋控制系統
U464
A
1000-3703(2015)11-0044-03
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
光學精密工程(2016年6期)2016-11-07 09:07:19
