攜行外骨骼自適應虛擬力矩控制研究
2015-01-04 06:24:46楊秀霞趙國榮
船電技術 2015年11期
楊秀霞,劉 迪,趙國榮
(海軍航空工程學院控制工程系,山東煙臺 264001)
0 引言
“下肢智能攜行外骨骼系統”屬于典型的人機一體化系統,其控制系統的任務是使外骨骼和操作者之間協調同步運動,相互作用力盡量少,這些要求使得外骨骼攜行系統的控制方案需要單獨考慮,這已引起了國內外學者的廣泛關注[1-5],主從控制[1]、力反饋控制[2]、肌電信號控制[3]、虛擬力矩控制[4,5]等均已應用于下肢外骨骼的控制,目前比較成功的當屬 BLEEX采用的虛擬力矩控制方法,此控制方案不需要從操作者或人機接觸處進行直接測量,人機之間沒有壓力傳感器,只是通過對外骨骼的測量,控制器控制外骨骼的移動,使人機之間的力最小。此控制方案以前從未應用于任何機器人系統,而當人體和外骨骼服之間的接觸點是未知的和不可預料的時候(比如人體和外骨骼服在很多地方接觸),這個控制方案是產生運動的非常有效的方法。但文獻[5]中給出的控制方法采用了簡單的PD控制,這對于下肢外骨骼這樣的存在摩擦等非線性因素的系統,并不適用,須采用具有魯棒性的非線性控制方法來進行控制。
為了克服上述虛擬力矩控制的不足,本文在深入分析人的行為特征以及攜行系統虛擬力矩控制機理的基礎上,基于李亞普諾夫穩定性原理設計了自適應控制器,并將其應用于下肢外骨骼的運動控制,理論分析及仿真結果證明了此控制方案的可行性及有效性。
1 下肢外骨骼的虛擬力矩控制
人——骨骼服組成的智能攜行系統屬于典型的人機一體化系統,其需要外骨骼和操作者之間的協調運動,即始終保持協調一致的運動節奏,以使二者之間的互相干涉作用最小,并可以根據人的運動意圖來適時提供助力。虛擬力矩控制選擇廣義力矩矢量從而避免了人機之間作用力的測量。控制律在外骨骼的關節空間而不是應用于一點的一組力或力矩。
穿戴者對外骨骼的力矩Thm可以認為是機器和人之間角位置差所產生的結果:

式中,qh為人體的角度輸出,q為外骨骼的關節角輸出,Kh是不同的人機接觸點的等效阻抗而不是實際阻抗。
虛擬力矩控制律見圖1。從圖中可以看出,通過人體運動時的各關節角q及外骨骼動力學方程(拉氏方程或Kane方程)計算,可得到各關節應施加的虛擬力矩,將其與電動機的實際輸出力矩Ta進行比較,作為控制器的輸入,加入控制K(s),從而控制外骨骼Ga,同時,人機之間若存在行走時的角度誤差,即q≠qh,那人機之間就存在相互作用力Thm,其也會作為輸入加在外骨骼上。從式(1)可以看出,人機之間的力矩與外骨骼的位置息息相關,控制目標Thm→ 0 與跟蹤目標q→qh是一致的,因此,只要保證q/qh的穩定就可以保證Thm/qh的穩定。
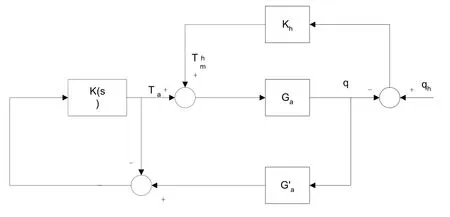
圖1 虛擬力矩控制方框圖
對于外骨骼系統,利用拉格朗日方程建立系統的動態模型:

J表示轉動慣,并且是q的函數;B表示離心和克里奧里矩陣,是q和q˙的函數;G表示重力力矩矢量,是q的函數。對應的關節力矩矢量為:
忽略摩擦力的影響,人對外骨骼的關節力矩為

T為電動機的輸出力矩,是外骨骼前向動態的估計,如果模型非常精確,則GaGa′=1。
控制方法嚴重依賴于系統的動態模型,必須建立系統的精確數學模型,在實際過程中,這往往是比較困難的,如公式(2)中J,B,G等參數均不易精確得到;文獻[5]中的控制方法采用了簡單的 PD控制,這對于下肢外骨骼這樣的存在摩擦等非線性因素及模型不確定性等影響的系統,并不適用,須采用具有魯棒性的非線性控制方法來進行控制。
2 系統的自適應控制設計
為了提高系統的性能,根據系統特性,采用非線性自適應控制器來代替 PD控制器,假設非線性控制器為F(e,e˙),則此時系統的控制結構如圖9所示。
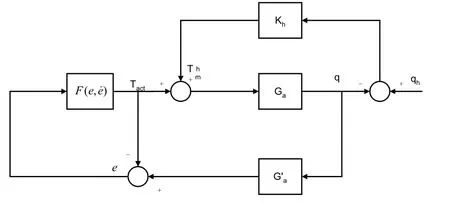
圖2 加入非線性控制器的下肢外骨骼控制系統框圖
通過運用外骨骼系統動態方程的逆模型估算的外骨骼輸入力矩以及測量的電動機輸出力矩,可得到虛擬的人機作用力Thm,而Thm的參考信號Thm_ref為0,設控制系統的誤差信號為e,則:

系統有下式成立:

下面采用基于Lyapunov函數穩定性的方法進行控制器的設計。
令:

則

定義Lyapunov函數

式中,Γ為對稱正定矩陣,在此取單位陣,對(11)式求導,得

令

其中,K為各分量大于0的常數矩陣,sgn(e)為符號函數,則

由此可得到非線性自適應控制器F(e,e˙)的具體表達式:

3 外骨骼的改進虛擬力矩控制實現
3.1 仿真實現
模型的參數采用Winter D.A.的人體參數[6],仿真時利用醫學步態分析(CGA)數據作為期望的人體運動信號[7],并且僅取擺動腿的數據。由于 CGA數據的步長較大,數據量不足,可以通過插值的方法得到其它的數據。
根據公式(15)加入自適應控制器,其中的動態數學模型 J(q)˙+B(q˙)+G(q)采用小波網絡的輸出結果,為了克服微分對誤差的放大作用,加入了濾波器環節。圖10至 12給出了K=[3,3,2]T時的仿真結果。
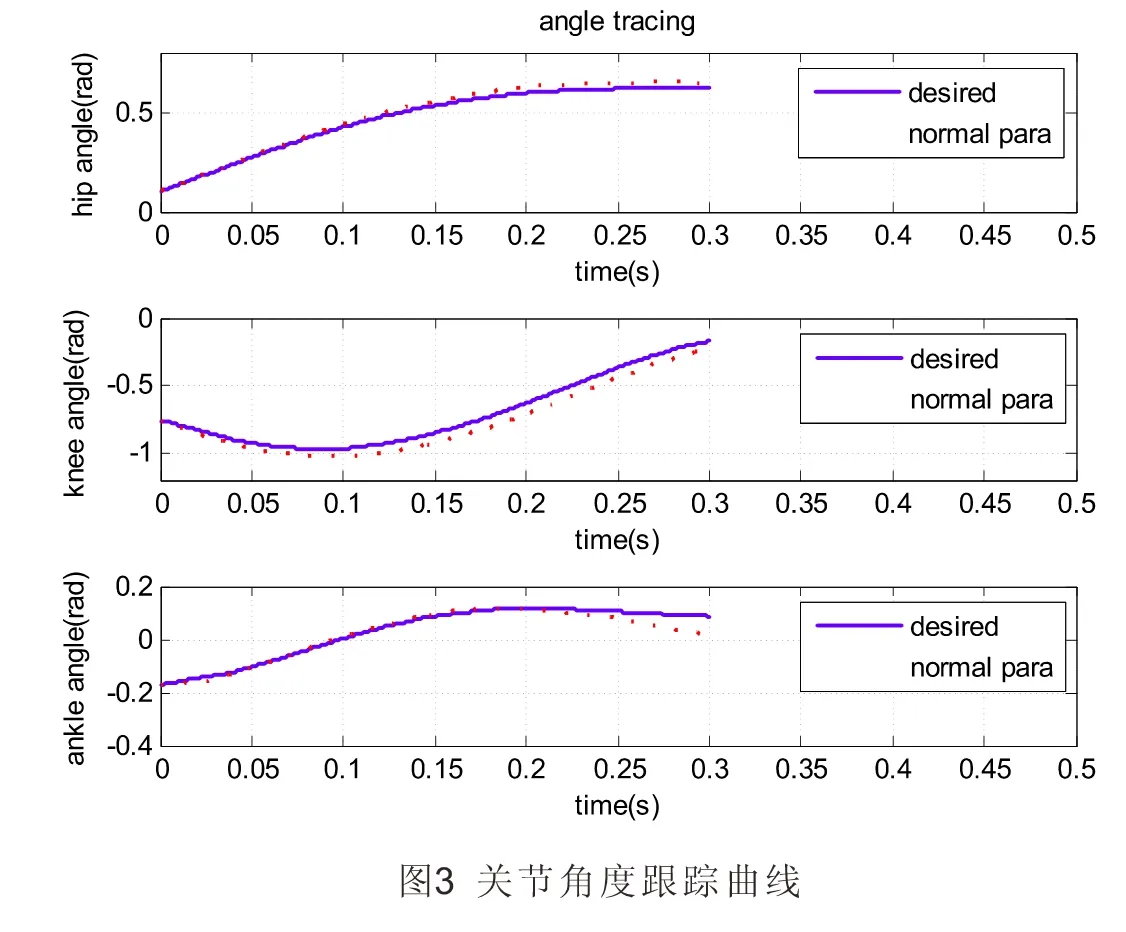
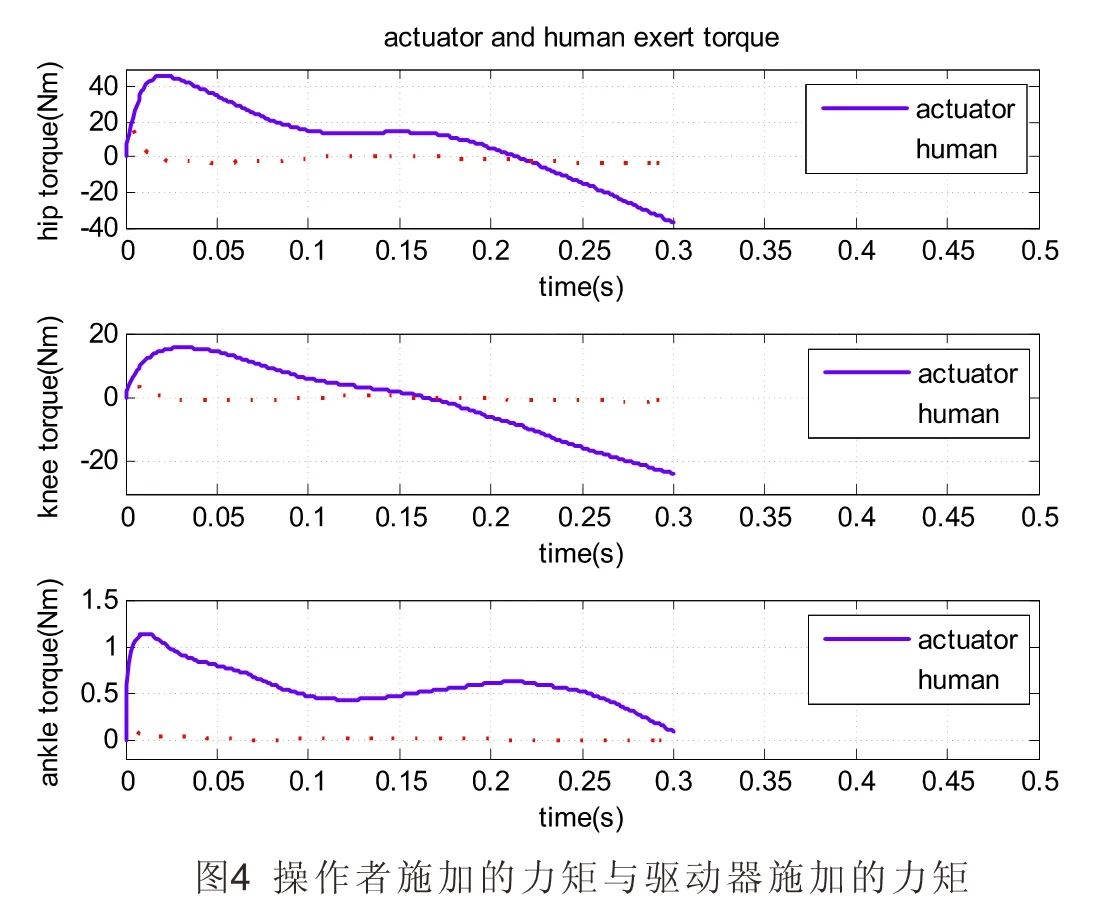
從圖3可以看出骨骼服能夠良好的跟蹤人體的運動軌跡。圖4說明在運動過程中人只需要提供一定的起動力矩,運動起來以后,絕大多數力矩由驅動器來提供,人提供的力矩僅限于改變運動狀態。
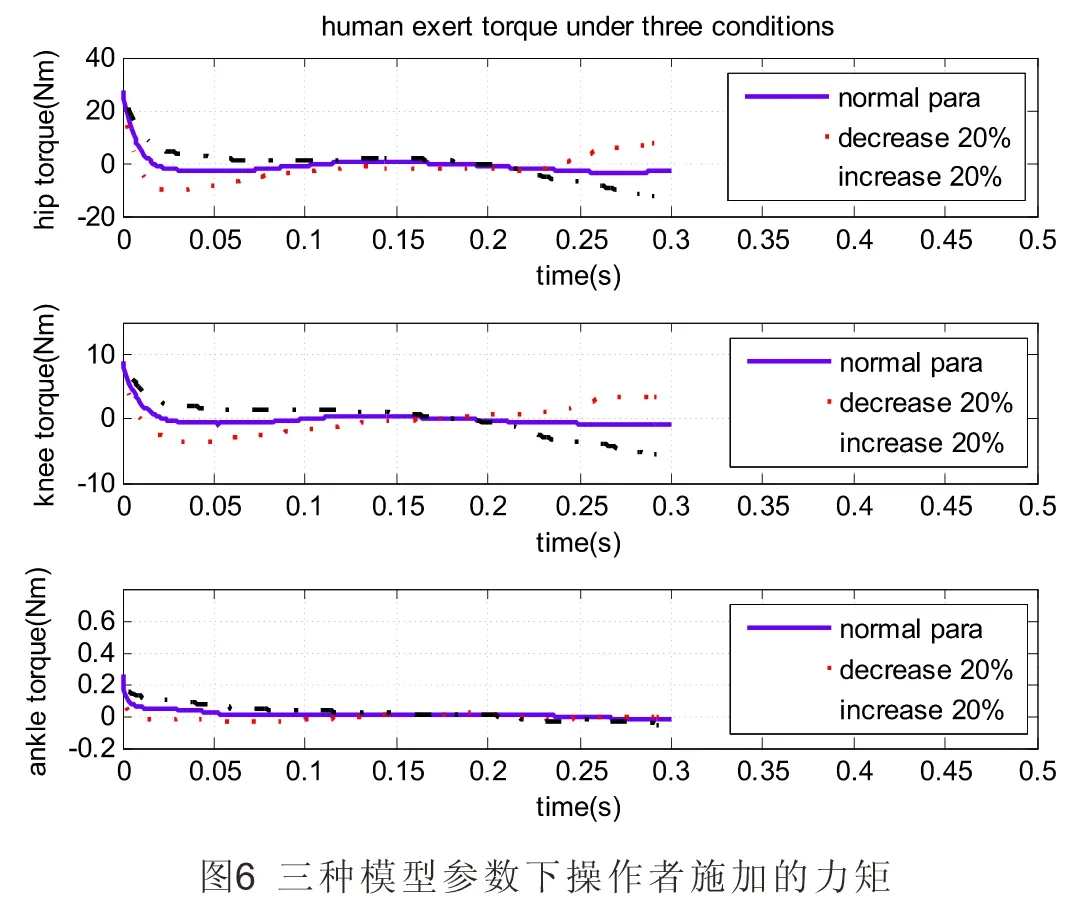
3.2 魯棒性分析
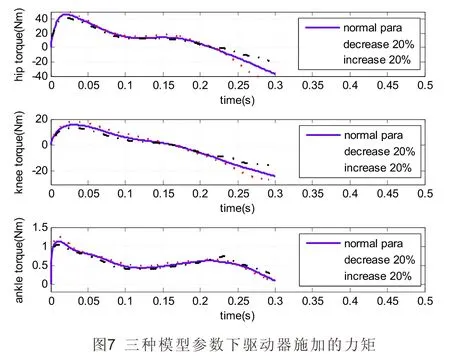
為了分析系統的抗干擾能力,對參數加入攝動。圖5至圖7給出了外骨骼質量參數均增加、減少20%以及正常情況下的仿真結果。可以得出結論,外骨骼基本能跟蹤操作者的角度輸出,驅動器及操作者施加的力矩改變不大,系統的魯棒性比較好。
4 小結
為了克服虛擬力矩控制嚴重依賴于系統的動態模型的缺點,將下肢外骨骼的虛擬樣機模型作為被控對象,對虛擬力矩控制系統動態方程的逆模型采用了小波網絡進行學習逼近,充分利用了小波網絡在時域及頻域所具有的非線性映射能力。基于李亞普諾夫穩定性原理設計了自適應控制器,并將其應用于下肢外骨骼的運動控制,理論分析及仿真結果證明了此控制方案的可行性及有效性。此方案已成功地應用于下肢攜行系統的虛擬樣機研制中,負重攜行時,人體施加的力明顯減少。
[1]Rosen J.,Brand M,Fuchs M.B.,Arcan M.A mysignal-based powered exoskeleton system.IEEE Transaction on Systems,Man,and Cybernetics-Part A:Systems and Humans,2001,31(3).
[2]Whitney D.E.Historical perspective and state of the art in robot force control.The International Journal of Robotics Research,1997.
[3]Hiroaki Kawamoto and Yoshiyuki Sankai.Power assist system HAL-3 for gait disorder person.ICCHP 2002,LNCS 2398,2002:196-203.
[4]H.Kazerooni,Jean-Louis Racine,Lihua Huang,and Ryan Steger.On the control of the berkeley lower extremity exoskeleton.Proceedings of the 2005 IEEE International Conference on Robotics and Automation,Barcelona,Spain,April 2005: 4353-4360.
[5]Jean-Louis Charles Racine.Control of lower extrimity exoskeleton for human performance amplication[D].University of Berkeley,California: 2003.
[6]Winter,D.A.Biomechanics of Human Movement.New York,1979.
[7]Kirtley C.Hong Kong Polytechnic University.
[8]Http://guardian.curtin.edu.au:16080/cga/data/HKfyp9 8/All.gcd.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
光學精密工程(2016年6期)2016-11-07 09:07:19