直線一級倒立擺的新型控制方法研究
2015-01-01 02:27:28孔慶忠徐祿均
機械工程與自動化 2015年5期
王 杰,孔慶忠,徐祿均
(內蒙古工業大學 機械學院,內蒙古 呼和浩特 010051)
0 引言
倒立擺的穩定控制在生活和生產中的應用非常廣泛。傳統的PID控制雖然能夠完成響應,如果效果不是特別明顯,如果將小車控制器設計成模糊PID控制器,并與擺桿閉環控制進行封裝,形成一個雙閉環PID控制器,就能夠更好地實現倒立擺系統的控制。
1 直線一級倒立擺的穩定性
直線一級倒立擺系統由小車、擺桿等組成,它們之間自由連接。在進行系統穩定性分析時,一般可以應用LaSalle’s Theorem或者是李亞普諾夫穩定性理論。本文根據系統未進行矯正時的階躍響應曲線來討論系統的穩定性,利用MATLAB進行階躍響應分析,結果如圖1、圖2所示。
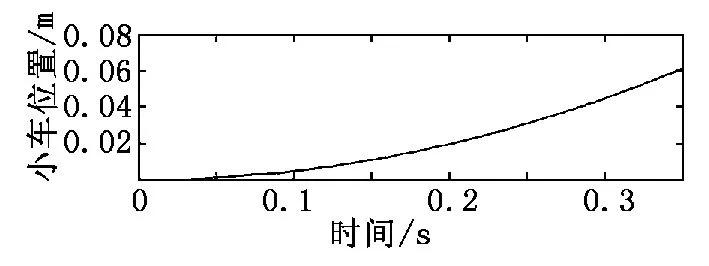
圖1 系統未矯正時小車位置的階躍響應曲線
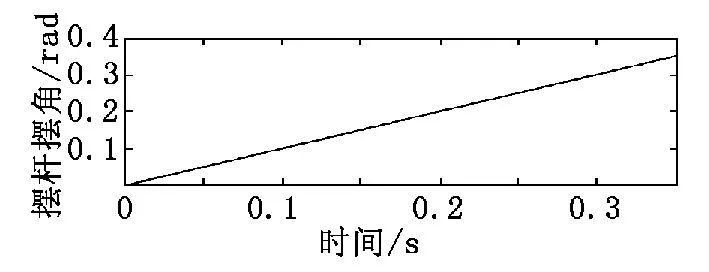
圖2 系統未矯正時擺桿擺角的階躍響應曲線
從圖1和圖2中可以看出,在階躍響應信號的作用下,擺桿的角度以及小車的位置曲線都是發散的,即在沒有使用控制器進行矯正之前,本系統在期望的平衡位置是一個非穩定系統。因此,系統需要矯正,使其變得穩定。由于直線一級倒立擺在平衡位置是能控的、可觀的,因此可以進行PID控制器設計,使系統穩定。
2 倒立擺擺桿與小車的傳統PID控制
2.1 倒立擺擺桿的傳統PID控制
把小車置于導軌中間位置,打開實驗設備,并且將擺桿手動提起置于倒立位置保持不動,然后單純對擺桿進行PID控制。根據多次實驗仿真可知:當PID控制器中比例系數Kp=30,積分系數Ki=20,微分系數Kd=2.5時,得到的仿真效果最佳。所以,將3個參數按照此值進行調節,得到的仿真曲線如圖3、圖4所示。
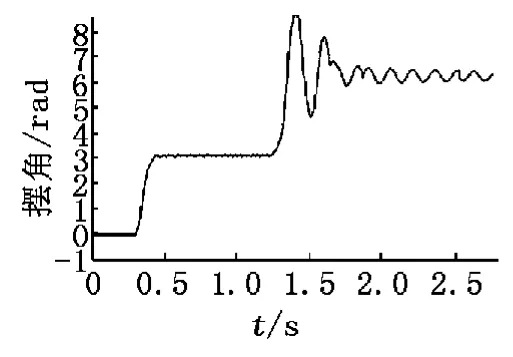
圖3 傳統PID控制 下擺桿仿真曲線
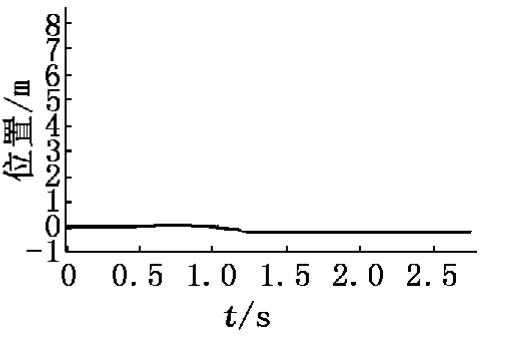
圖4 傳統PID控制下小車位置仿真曲線
在0.3s~0.5s時刻,為手動提起過程,從圖3、圖4可知,此過程中擺桿的角度不斷增加,當時間達到0.5s之后,擺桿在PID控制器的控制下能夠自動保持倒立不倒,維持平衡不倒,小車也能維持短暫平衡狀態;時間達到1.3s時,小車曲線出現突然下降,此時擺桿的角度突然增大,之后小車位置不再變化,擺桿的角度在此后出現大幅度震蕩,擺桿在重力作用下向初始位置運動,此時小車在導軌上運動到極限位置,出現阻礙后就不再運動,也就不能給擺桿倒立不倒的力;在2s之后,小車的位置保持不變,也就是處于靜止狀態,擺桿在重力作用下,由于慣性作用繼續左右擺動,能夠維持短暫的自由擺動,直至能量消耗完就靜止。所以,單獨對擺桿進行PID控制器控制,能夠達到最終目的,但是穩定效果不是特別明顯。
2.2 倒立擺小車的模糊PID控制
為保證擺桿直立運動,小車必須擁有合適的位移以及速度。但是對于由伺服電機帶動的小車來說,不能精確地給出數學模型以及傳遞函數。因此,在對擺桿進行角度檢測之后,對小車的控制采用模糊PID控制。當擺桿在直立的平衡位置范圍內擺動時,控制小車的速度及位移,使擺桿直立不倒。對于擺桿來說,起擺的速度和加速度比較大,當達到平衡位置時,加速度在較小范圍內變化。用模糊PID控制倒立擺小車得到的仿真曲線如圖5所示,此時倒立擺擺桿的仿真曲線如圖6所示。
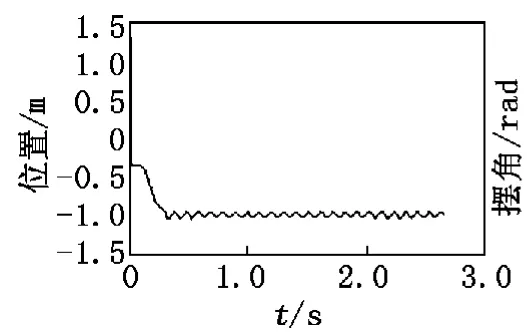
圖5 模糊PID控制下小車位置仿真曲線
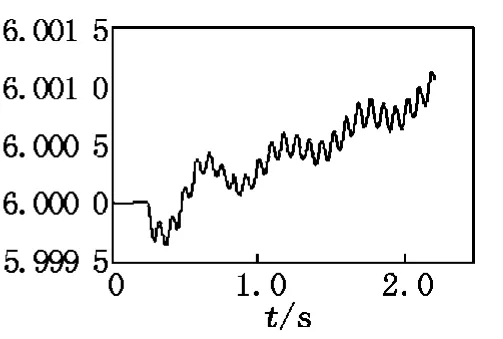
圖6 模糊PID控制 下擺桿仿真曲線
在這種單一對小車進行模糊控制的情況下,小車運動穩定,倒立擺擺桿的運動在單位時間內是穩定的,但是在整個控制過程中是不穩定的。這種控制效果雖然也能夠達到讓倒立擺擺桿倒立穩定的目的,但是,控制效果并不理想。為了能使擺桿得到更加優良的控制,實現理想的控制效果,還可以尋找更好的控制方法。
3 倒立擺擺桿與小車的新型PID控制
根據上述兩種控制進行綜合分析,單純對擺桿進行PID控制可以使系統維持短暫時間的穩定,當小車遇到極限位置時系統停止運動;單純對小車進行PID控制時,系統更加不穩定,魯棒性能效果不理想,穩定時間變得更小。因此,在上述理論的基礎上,分別將兩個控制器進行組合,形成雙PID控制組合,得到的倒立擺系統閉環PID控制器如圖7所示。利用這種雙閉環控制器,得到倒立擺的實時控制仿真曲線,如圖8、圖9所示。
從圖8、圖9可以很清晰地看到,擺桿在兩個控制器的控制下維持倒立穩定,雖然小車仿真曲線出現震蕩,但是小車可以在導軌上的某個范圍內一直運動,保證擺桿倒立不倒。本實驗仿真結果顯示:雙閉環控制器對此倒立擺系統具有很好的控制作用。
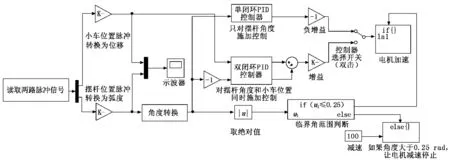
圖7 倒立擺系統閉環PID控制器
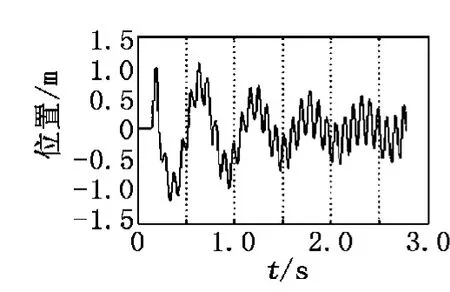
圖8 閉環PID控制下小車位置仿真曲線
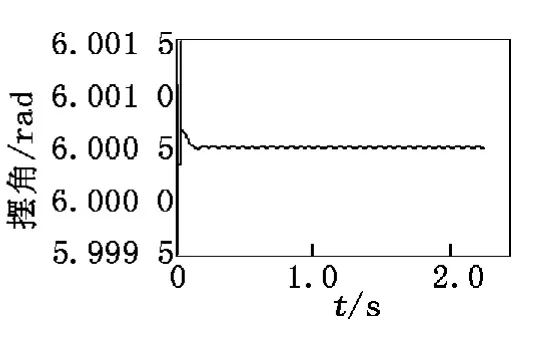
圖9 閉環PID控制 下擺桿仿真曲線
4 結論
單獨對擺桿進行PID控制器控制,能夠達到最終目的,但是穩定效果不是特別明顯。單獨對小車進行模糊PID控制,也能達到最終目的,效果仍然不是特別明顯。在分析這兩個單獨的控制器的基礎上,將兩個獨立的控制器進行組合封裝,形成一個雙閉環PID控制器,能夠很好地實現倒立擺系統的控制,最終達到理想的效果。
[1] 黃宏格.直線倒立擺機理模型及控制性能研究[D].長沙:中南大學,2008:5-6.
[2] 王雪.基于小車倒立擺的自動控制原理開放性實驗的開發與研究[D].重慶:重慶大學,2007:25-27.
[3] 徐雄,石曙東.基于 Matlab的實時模糊控制系統的研發[J].湖北師范學院學報,2007(3):79-81.
[4] 王孝莉.倒立擺智能控制系統的研究[D].濟南:山東大學,2007:35-38.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
中老年保健(2021年12期)2021-11-30 02:58:01
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
攝影之友(影像視覺)(2019年2期)2019-03-05 08:27:14
中華詩詞(2018年11期)2018-03-26 06:41:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
Coco薇(2016年8期)2016-10-09 02:11:50