公鐵兩用混合動力牽引車動力參數匹配與仿真
2014-12-25 03:11:50駱素君朱詩順
軍事交通學院學報 2014年3期
駱素君,孫 燕,朱詩順
(1.軍事交通學院 軍事物流系,天津300161;2.軍事交通學院 軍用車輛系,天津300161)
動力系統是車輛的“心臟”,所以,動力系統設計得好壞直接影響車輛的性能。混合動力車輛有2 個“心臟”。如何合理地利用2 個動力源,減少兩者之間的沖突,更好地發揮雙動力源的優越性,是混合動力系統設計需要解決的主要問題。混合動力系統參數匹配對整車的動力性、經濟性和排放性均有顯著影響,直接關系到混合動力汽車能否達到節能和環保的要求。通過對混合動力系統優化控制,可使發動機、電動機和蓄電池保持在最佳經濟區運行,并實現再生制動能量回收,提高整車的能量利用率。
目前的參數匹配研究多集中在輕型轎車和公交客車上[1-3],認為:并聯式轎車中發動機和電動機的功率匹配原則,是由發動機提供車輛平均行駛功率,由電動機提供峰值功率[2];大型公交車中發電機和蓄電池組的功率匹配應基于循環工況,電動機的匹配應基于加速需求的匹配原則[3]。而對公鐵兩用牽引車混合動力系統功率匹配的研究還鮮有報道。基于此,本文以某型傳統牽引車為原型,在對其動力系統進行改造、重新匹配的基礎上,擬開發一款適合場地貨運等特定工作環境的混合動力牽引車,并建立混合動力系統的整車驅動模型。采用ADVISOR 仿真軟件對其進行性能仿真、分析,以達到整車動力性不降低前提下,燃油經濟性有較大幅度提高的設計目標。
1 驅動系統設計
1.1 驅動系統總體結構
本文設計的公鐵兩用混合動力牽引車的驅動系統為并聯式(如圖1 所示),包括發動機、集成啟動發電機(integrated starter and generator,ISG)、電控離合器、電控機械式自動變速器(AMT)、驅動電動機和蓄電池組成的儲能系統。整車控制器(hybrid control unit,HCU)一方面通過總線CAN 與發動機控制器(ECM)和AMT 控制器(TCU)進行通信,另一方面通過總線CAN 與ISG 控制器(ISGC)、驅動電動機控制器(DMC)和電能管理單元(EEMU)進行通信。

圖1 并聯式簡圖
牽引車由并聯式混合動力裝置的發動機和電動機共同驅動。發動機與電動機分屬2 套系統,可以分別獨立地向車輛傳動系統提供轉矩,在不同工況下既可以共同驅動又可以單獨驅動。當車輛負荷較大或在有一定坡度的軌道上作業時,電動機和發動機能夠同時向傳動機構提供動力;當車輛在空曠的開闊地作業、動力系統負荷不高時,可單獨依靠發動機維持作業,并可以同時為蓄電池組充電;當車輛在隧道或山洞作業時,利用蓄電池組單獨工作,實現零排放。由于發動機可以直接通過傳動機構驅動車輪,這種裝置更接近傳統的驅動系統,機械效率損耗與普通牽引車差不多。
1.2 驅動系統仿真建模
公鐵兩用混合動力牽引車仿真系統由發動機模塊、永磁電動機模塊、蓄電池組模塊、車身模塊、傳動部分模塊、電子電器模塊和車輪模塊等組成,仿真軟件采用ADVISOR 2002,其仿真頂層模塊如圖2 所示。本文模型是對ADVISOR 進行二次開發,由軟件本身單軸驅動改為多軸驅動模型。
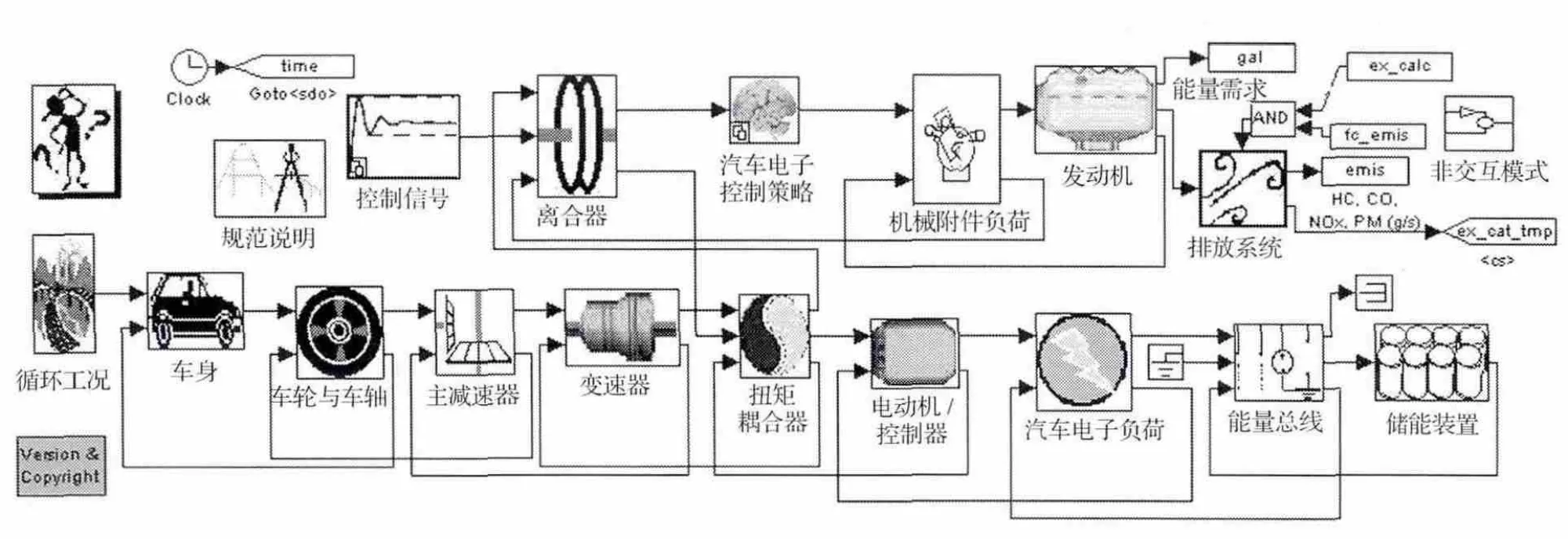
圖2 仿真系統頂層模塊
通過對我國鐵路調車現狀的調研和分析,結合我國現有公鐵兩用車的設計開發和生產制造現狀,充分考慮鐵路調車作業所存在的問題,在設計該型公鐵兩用軌道混合動力牽引車時,動力系統采用模塊化混合動力分時驅動系統,即在平時采用單軸或部分驅動軸驅動,而在特殊作業時則利用具有標準接口的模塊化混合動力總成部件對車輛進行升級,使公鐵兩用牽引車實現多軸或全輪驅動,全面提高牽引車的性能。模塊化總成部件包括發電機、電動機以及蓄電池組。這種模塊化設計概念,可根據驅動要求快速高效地增減驅動能力,既能滿足公鐵兩用牽引車在各種使用環境下的性能要求,解決平時大馬拉小車的現象,又可以避免傳統民用混合動力車輛的設計方式,每天載著質量幾百千克的混合動力附件運行。
2 參數匹配
2.1 動力性能評價指標
混合動力牽引車的動力性能主要以車輛的最高速度、最大爬坡度和最大牽引力等3 個指標綜合評價。另外,混合動力牽引車還要具有一定的純電動作用能力,即在隧道或排放要求高的環境中作用時,牽引車要關閉發動機,由蓄電池組單獨供電作業,其純電動續駛里程要大于或等于隧道的縱深。
2.2 驅動系統參數匹配
2.2.1 發動機參數的確定
公鐵兩用混合動力牽引車動力總成參數確定的基本原則是:發動機功率需滿足牽引動力需求,即以最大牽引力Fmax和允許的最小穩定車速Vmin行駛時的所需功率為電動機最大輸出功率。
車輛行駛所需要的最大功率為

其中

式中:P1為車輛行駛所需要的最大功率,kW;Ff為滾動阻力,N;Fw為空氣阻力,N;Ft為掛鉤牽引力,N;f為滾動阻力系數;CD為空氣阻力系數;A為迎風面積,即車輛行駛方向的投影面積,m2;Gc為牽引貨物的質量,包括拖車,t;Gp為牽引車的自身質量,t。
因此,發動機應提供的最大功率可由式(1)和式(2)確定,即

式中ηT為整車傳動效率。
2.2.2 電動機參數的確定
電動機參數包括電動機額定功率Pe、電動機最大功率Pm、電動機額定轉速Ne、電動機最大轉速Nm、電動機額定轉矩Te、電動機最大轉矩Tm和過載系數λ。
公鐵兩用混合動力牽引車的電動機功率主要用于車輛在山洞或碼頭地域無排放作業,另外對車輛加速和爬坡進行動力輔助。電動機額定功率和額定轉矩以給定車速和最大牽引質量下牽引車純電動工作里程,通過式(3)、(4)確定。

電動機的過載系數λ 是電動機的一個重要參數,由電動機類型和生產廠家的技術能力決定。電動機較大的過載系數能使混合動力車輛的動力性提升一大步。
2.2.3 蓄電池參數的確定
目前國內動力蓄電池中,鋰離子蓄電池相比其他蓄電池的物理和化學特性更勝一籌,產品已經成功地運用到電動客車及其他一些民用電動車輛上。因此,在混合動力牽引車上也可采用鋰離子動力蓄電池[4]。
(1)蓄電池個數的選擇。根據整車電壓需求,蓄電池個數ns定為

式中:U為蓄電池組端電壓;U0為單個蓄電池端電壓。
(2)蓄電池功率的選擇。在某些情況下,混合動力牽引車需要蓄電池具有很大的放電功率,但持續時間很短,放出的電量很少。鋰離子蓄電池可以以倍率電流放電,其輸出功率為

式中:Uc為倍率放電時蓄電池組端電壓;Ic為倍率放電電流。
(3)蓄電池容量的選擇。具有一定的純電動作業里程,可以大大提高公鐵兩用混合動力牽引車的環境適應能力。在牽引車上裝備具有一定容量的蓄電池組,是很有必要的。但蓄電池組容量越大,質量也相應增加,這樣會影響整車的動力性。因此,選擇合適的蓄電池容量,對混合動力牽引車具有重要意義。
按功率需求選擇蓄電池容量為

式中:C為蓄電池組的最大放電倍率;uc為單個蓄電池倍率放電時的端電壓;η 為放電比率。
按能量需求選擇蓄電池容量為

式中:W為純電動行駛所需總電能;soc為蓄電池組放電深度;u0為單個蓄電池的端電壓。
最終,蓄電池容量Qm為

3 性能仿真
3.1 仿真參數
在參數匹配計算中,牽引質量2 200 t,車輛自身質量10 t,坡度30%,最小速度10 km/h,傳動效率ηT=0.9,滾動阻力系數f=0.013,空氣阻力系數CD=0.58,迎風面積A=6 m2,純電動行駛里程為20 km。由式(1)—(9)得各部件參數見表1。

表1 公鐵兩用混合動力牽引車總成部件參數
仿真參數見表1,仿真工況為UDDS 循環工況(如圖3 所示)。

圖3 UDDS 循環工況
3.2 仿真結果與分析
將該車仿真參數輸入到圖4 所示的用戶界面,運行軟件[5-6],最終得到電動機工作狀態(如圖5 所示)和仿真結果(見表2)。

圖4 ADVISOR 用戶輸入界面

圖5 電動機工作狀態

表2 仿真結果
圖5 顯示了電動機的工作點,可以看出電動機工作在最高效率曲線附近,說明了速比控制的合理性。由于混合動力牽引車為弱混合形式,從圖5可知,電動機的轉矩變化范圍不大,只是起能量輔助作用或進行短距離純電動運行。表2 為性能仿真結果,該數據可為臺架實驗結果提供參考。
4 結 論
(1)該設計不僅滿足車輛的動力性需求,而且在牽引車正常工作過程中,蓄電池的soc值始終保持在設定的合理范圍內。
(2)電動機在合理工作區工作,發動機工作在高效區域附近,尾氣排放控制在國家標準以內。
(3)動力系統匹配結果達到了預設的目標,能夠應用到實車改造。
[1] Yimin G,Mehrdad E. Parametric design of the traction motor and energy storage for series hybrid off-road and military vehicles[J]. IEEE Transaction on Power Electronics,2006,21(3):749-755.
[2] 王慶年,何洪文,李幼德. 并聯混合動力汽車傳動系參數匹配[J].吉林工業大學學報:自然科學版,2000,30(1):72-75.
[3] Niasar A H,Moghbelli H,Vahedi A. Design methodology of drive train for a series-parallel hybrid electric vehicle (SP-HEV)and its power flow control strategy[J]. IEEE,2005:1549-1553.
[4] 孫燕,朱詩順.基于某型高機動越野車的混合動力改造研究[J].軍事交通學院學報,2012,14(5):58-61.
[5] 李騰騰,秦孔建,高俊華,等.并聯混合動力客車等效燃油經濟性分析[J].汽車工程,2012 ,34(4):297-300.
[6] 牛晶,逯玉林.并聯式混合動力汽車能量控制系統仿真研究[J].公路與汽運,2011(6):14-18.
