礦用履帶式勘查車輛行駛平順性試驗研究
2014-12-23 06:43:52閆永
機械工程師 2014年12期
閆永
(棗莊科技職業學院,山東滕州277500)
0 引言
履帶式勘查車是煤礦安全生產中不可或缺的設備,它的主要功用分為三個方面[1]:1)當煤礦井下發生安全事故時,可以搭載探測設備、數據采集設備和通信設備,利用車輛較強的通過性能在遠程遙控的情況下到達現場實施或輔助救援工作;2)對危險巷道進行開采時,搭載常規勘查設備替代人為現場勘測,作為自動化勘測平臺使用;3)底盤頂部位可以更換成運輸平臺,在煤礦日常生產中,利用較大的負載能力輔助搬運設備。
履帶勘查車的行駛平順性是它最重要的性能指標之一,通常車輛中行駛平順性是指駕駛人員的舒適度,評價標準是質心加速度的大小[2],在本文中研究的是無人駕駛的遠程操控車輛,所以將行駛平順性看作評價車載設備工作性能的指標。
1 試驗目的及方法
1)試驗目的:試驗分析履帶底盤的行駛平順性。車輛的行駛平順性是衡量車輛性能的一項重要指標,同時底盤行駛平順性的優劣對車載儀器的工作性能有很大的影響。
2)試驗方法:對于履帶底盤行駛平順性試驗,因為暫時還沒有一個標準的評價履帶車輛行駛平順性的試驗方案,所以本試驗方案中借鑒輪式車輛的測量方法,讓履帶底盤以不同的速度通過高100mm的臺階式障礙物,通過測量其不同位置的加速度來分析評估履帶底盤的行駛平順性。
2 試驗方案
為試驗所搭建的試驗臺主要由信息采集和分析系統、試驗樣機以及障礙物3個部分組成。
本試驗的測試系統框圖如圖1所示,它包括加速度傳感器、電荷放大器、數據采集分析軟件,圖2是車輛動態測試試驗臺。
3 測點布置
對車輛行駛平順性的測量主要是質心位置的豎向加速度與車輛尾部的豎向加速度[3],如圖3所示,根據質心位置以及車輛尾部的豎向加速度來評估車輛的行駛平順性。
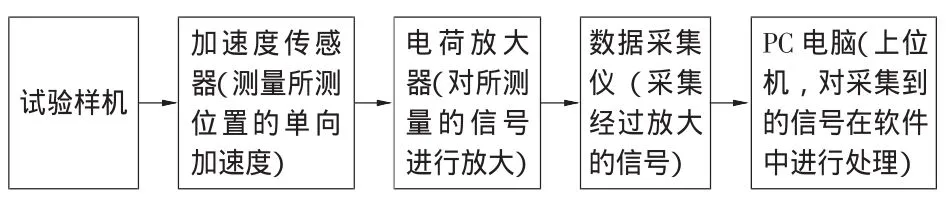
圖1 測試系統框圖
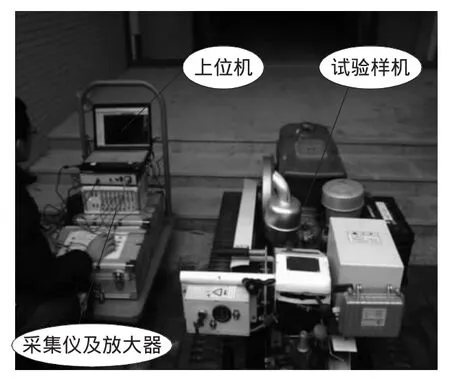
圖2 試驗臺

圖3 行駛平順性測點
4 試驗結果
在平順的路面上讓履帶底盤分別以2.5 km/h,5 km/h,7.5 km/h的速度勻速通過100 mm高度的木塊,對兩個測量點的數據進行采集處理。圖4是車輛行駛速度為2.5 km/h時測點一和測點二的測量結果,圖5為車輛行駛速度為5 km/h時測點一和測點二的測量結果,圖6為車輛行駛速度為7.5 km/h時測點一和測點二的測量結果。

圖4 速度2.5 km/h時測量界面
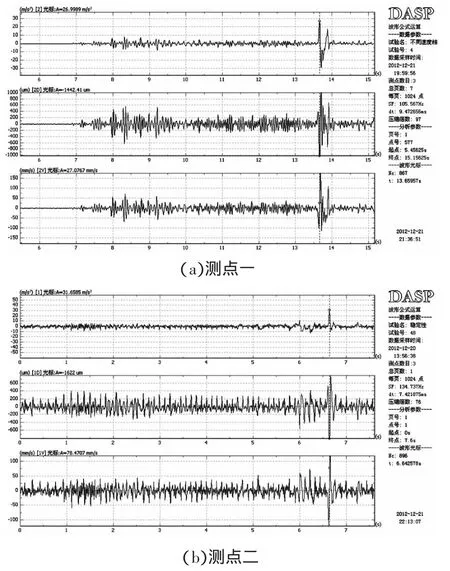
圖5 速度5 km/h時測量界面

圖6 速度7.5 km/h時測量界面
5 結果分析及結論
對數據進行分析統計,表1和表2分別為車輛質心位置和車輛尾部測量點的極值數據,排除誤差數據,當車輛行駛速度為2.5 km/h時,質心位置和車輛尾部的最大加速度分別為18.6 m/s2和23.5 m/s2。圖7和圖8是測量極值的變化趨勢,從中可以發現隨著車輛行駛速度的增加,車輛在通過木塊時候的最大加速度逐漸增大,這說明車輛在通過木塊的過程中行駛速度越大越不穩定[4],出現顛簸感越強,對車身設備的影響越大。
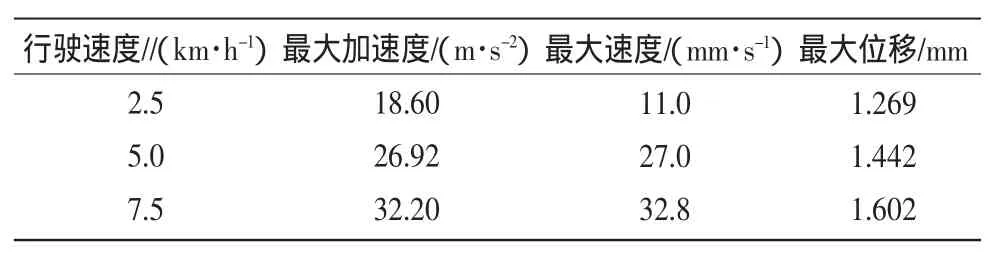
表1 質心位置極值數據
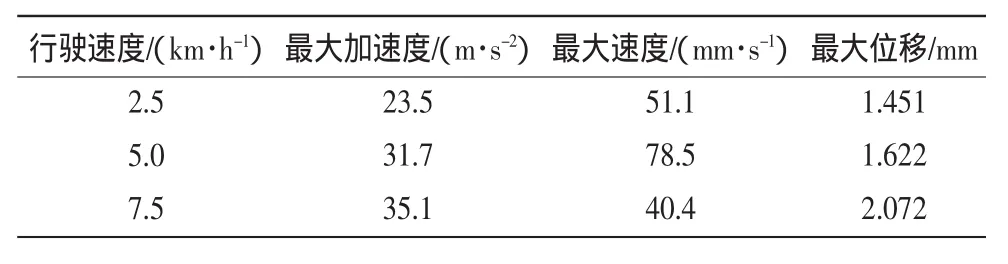
表2 車輛尾部極值數據
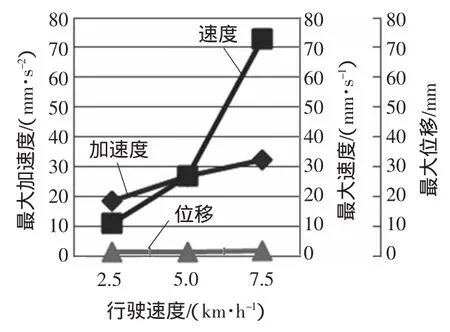
圖7 質心位置極值變化趨勢
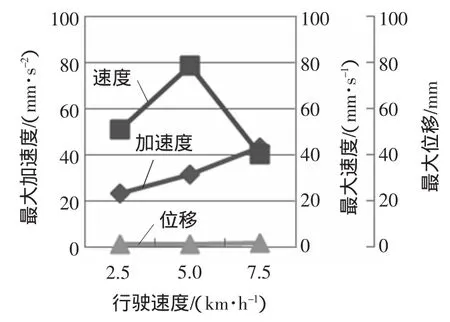
圖8 車輛尾部極值變化趨勢
質心位置相對于車輛尾部的極值加速度較小,這一點也可以反映質心位置的穩定性優于車輛尾部,車輛尾部的最大速度明顯大于質心位置,說明尾部行程較大,加速時間較長。
通過試驗極值數據可以初步確定車輛的行駛平順性較差,且較大的速度變化引起的振動會影響到車載設備工作的可靠性[5]。
[1] 王忠民,劉軍,竇智.礦難救援機器人的研究應用現狀與開發[J].煤礦機械,2007,28(11):6-8.
[2] 王宵峰.汽車底盤設計[M].北京:清華大學出版社,2005.
[3] 曹為,葛世榮,黃俊軍.煤礦救災機器人環境探測多參數傳感器設計[J].煤礦機械,2008,29(3):26-28.
[4] 朱志豪,華順剛,張麗娜,等.履帶車輛行駛平順性仿真及試驗[J].光電技術應用,2010,25(2):71-74.
[5] 莫海軍,朱文堅.履帶式移動機器人越障穩定性分析[J].機械科學與技術,2007,26(1):65-67.
