電磁反力式混合型主動懸架最優控制研究
2014-12-19 01:45:44卜祥風慶鵬程曹本龍
制造業自動化 2014年9期
卜祥風,慶鵬程,曹本龍
BU Xiang-feng,QING Peng-cheng,CAO Ben-long
(江蘇大學 汽車與交通工程學院,鎮江 212013)
0 引言
懸架是汽車中的一個重要總成,它把車架與車輪彈性地聯系起來。懸架的好壞關系著汽車的多種使用性能,伴隨著對懸架性能要求的提高,全主動、半主動懸架應運而生。全主動懸架通過產生主動力代替彈簧和阻尼力,有比較理想的減振效果,但其能耗大和失效穩定性差一直為人詬病。半主動懸架通常通過可調阻尼減振器來對懸架進行實時控制,效果明顯。較之全主動懸架能耗小且有一定的失效穩定性。
文獻[1]研究了在被動懸架輪胎環節加裝被動動力吸振器的減振效果,研究表明被動動力吸振器減振頻帶較窄。文獻[2][3]設計了電磁反力作動器,并將之取代被動動力吸振器,構成新型主動懸架,文章稱之為混合型主動懸架。由于只在被動懸架輪胎環節加裝電力反力作動器,所以結構較簡單。其采用的PID控制,僅僅在輪胎固有頻率處削減了共振峰,控制效果不顯著,但其對混合型懸架可變點的研究表明了混合型懸架相較普通主動懸架的優勢。普通主動懸架在輪胎固有頻率處不可改善。本文基于成熟的LQG理論,為混合型主動懸架設計了最優控制器,并且通過合理優化加權參數取得了較好的控制效果。
1 路面輸入模型和混合型懸架系統模型的建立
1.1 路面輸入模型
車輛振動輸入通常用路面不平度來表示,其主要采用路面功率譜密度描述其統計特性。路面功率譜密度Gq(n)由下式給出:

當w=2,轉化為時間譜密度并考慮車速因素,路面模型可用如下微分方程給出[2]:

上式中q(t)為路面垂向位移輸入、f0為路面輸入下截止頻率、G0為路面不平度系數、U0為汽車行駛速度、白噪聲。
1.2 混合型主動懸架模型
本文提出的混合型主動懸架是僅在傳統被動懸架車輪環節加裝電磁反力式作動器,通過電磁作動器產生主動力抑制車輪振動。原理上相當于在車輪上增加了天棚阻尼力,通過改變電磁力Fa達到控制懸架振動的目的。圖1所示為該型懸架的兩自由度1/4模型[3]。當電磁力為零時變為文獻[1]所述被動吸振形式。

圖1 電磁反力混合懸架模型
圖中參數依次為m1車輪等效質量、m2車身等效質量、m3作動器結構中質量塊的質量、k連接彈簧等效剛度、k2輪胎等效剛度、k3作動器彈簧等效剛度、c車輪車身間等效阻尼、c3作動器阻尼和Fa電磁力,q、x3、x1和x2分別為路面激勵、動質量塊、輪胎、車體之位移。由牛頓第二定律可知系統的運動微分方程可表示為:

由(2)式+(3)式可得:


系統狀態方程為:


2 系統性能指標的建立與最優控制器的設計
2.1 性能指標的建立
采用最優控制的混合型主動懸架其控制目標兼顧車輛行駛平順性、操控穩定性和系統能耗。實際行駛中要求車體振動的加速度盡量小、懸架的動行程在規定范圍內,使懸架降低撞擊到限位塊的可能性,并且能耗不能太大,反饋控制力不能超出電磁反力作動器產生力的上限。綜合考量,確立目標函數為:

式中第一項反映車身振動加速度、第二項反映懸架動行程、第三項反映了輪胎動載荷、第四項反映消耗的能量,ρ、q1、q1和r分別為對應項的加權系數,其中為方便取ρ=1。加權系數可根據需要選定,不同的設定反映設計者對懸架不同的傾向。把目標函數改寫成的標準形式,但注意到目標函數中含有第一項,無法直接改成成標準形式。由(3)式得:

把(10)式代入(9)式整理并改寫成標準形式為:
2.2 最優控制器的設計
由最優控制理論導出最優控制力[4]:

其中K為最優反饋增益矩陣,矩陣P滿足黎卡提(Riccati)代數方程:

在Matlab中調用線性二次型最優控制器設計函數[K,P,E]=lqr(A,B,Q,R)即可求出反饋增益矩陣K,即完成最優控制器的設計。根據任意時刻的狀態向量x(t),得出對應時刻的最優控制力為:

3 實例仿真分析
3.1 懸架參數和仿真模型
選用某一特定車型1/4模型,其相關參數如下表1所示。

表1 混合型主動懸架參數
假定汽車以40km/h的速度行駛在C級路面上,路面輸入由1.1節的路面模型給出。在Simulink環境下,由設計好的路面模型及最優控制器建立混合型主動懸架的仿真模型[5]如圖2所示。

圖2 混合型懸架最優控制仿真模型
3.2 仿真結果分析

圖3 車身加速度對比
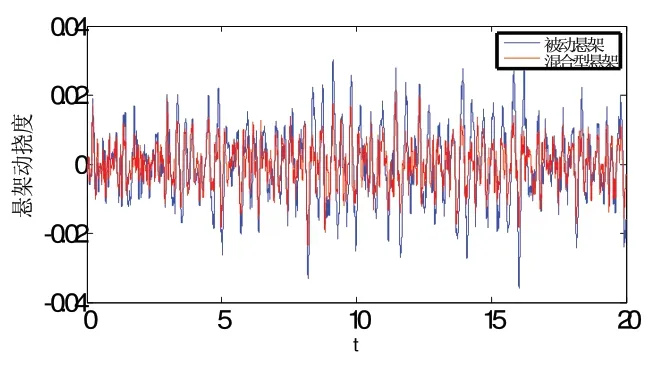
圖4 懸架動撓度對比

圖5 輪胎動載荷對比
圖3和圖4表明,混合型主動懸架車身加速度和懸架動撓度相比于被動懸架改善較明顯。而從圖5可與混合型懸架在輪胎動載荷方面未有改善。
混合型懸架和被動懸架三個指標的均方根值對比列于表2。同時給出了另外三組加權系數下懸架性能的對比結果。

表2 懸架性能均方根值對比
表2可知,在仿真所設加權指標下混合型主動懸架的三個性能指標均優于被動懸架。其中車身加速度改善15.42%,懸架動行程改善7.45%,輪胎動載荷惡化1.64%。當加權系數改變時,性能指標亦會相應改變。q1增大,懸架動行程將會減小。q2增大,輪胎動載荷相應減小。因此,通過調整加權系數可以實現偏愛和多目標協調控制,這是最優控制的一大優點。
下面給出頻域仿真的對比如圖6至圖8所示。

圖6 車身加速度幅頻特性對比

圖7 懸架動撓度對比

圖8 輪胎動載荷對比
圖6表明混合型懸架很好地削減了兩個共振峰,并在人體較敏感的4Hz到8Hz之間也有所改善,圖7表明懸架動撓度與車身加速度一樣有相似的改善。而從圖8可以看出,混合型懸架的幅值在低頻段有惡化的現象,但從相頻圖上可以看出此頻段的相角約為180o,這意味著當路面輸入向上時輪胎動載荷向下,方向相反,實際改善了輪胎的觸地性。在3Hz到10Hz有不明顯的惡化,但在車輪固有頻率處有所改善。上述結果表明所設計控制器的有效性。
4 結束語
1)本文提出了一種兼具主被動懸架特征的混合型主動懸架。通過合理建模研究了該型懸架的狀態空間,采用最優控制理論確定了性能指標,并設計了懸架系統的線性高斯二次型控制器。在Matlab/Simulink環境下對模型進行了時域、頻域的仿真研究。
2)仿真結果表明最優控制下混合型主動懸架車身加速度、懸架動行程兩個指標的均方根值相較被動懸架均有所改善,從而驗證了最優控制下此型懸架的可行性。
[1]張孝祖,武鵬.裝有動力吸振器的汽車懸架性能分析[J].江蘇大學學報,2004,25(5):389-392.
[2]胡思明.電磁反力式混合型主動懸架控制系統研究[D].江蘇大學,2008.
[3]戴建軍.電磁反力式混合型主動懸架作動器研究與設計[D].江蘇大學,2008.
[4]蘭波,喻凡.車輛主動懸架LQG控制器的設計與仿真分析[J].農業機械學報,200435(1):13-17.
[5]黃文梅,楊勇,熊桂林,等.系統方針分析與設計——MATLAB 語言工程應用[M].長沙:國防科技大學出版社,2001:182-193.
[6]武鵬.車輛半主動懸架魯棒控制研究[D].江蘇大學.2005.
[7]舒歌群,郝志勇.內燃機振動動力式主動吸振器的研究[J].汽車技術1999,4:9-10.
[8]何鐵平.汽車發動機動載傳遞的反力主動控制技術研究[D].江蘇大學.2005.
[9]ISO 2631-1:1997(E).Mechanical vibration and shock-Evaluation of human exposure to whole-body vibration-Part1:General requirements
[10]Shuldiner H.Bose Knows—Shocks[J].Ward's Auto World,2004,40(9):26-27,54.
[11]Jones W.Easy Ride:Bose Corp.Uses Speaker Technology to Give Cars Adaptive Suspension[J].IEEE Spectrum,2005,42(5):12-14.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
現代裝飾(2020年7期)2020-07-27 01:27:42
數學物理學報(2020年2期)2020-06-02 11:29:24
流行色(2020年1期)2020-04-28 11:16:38
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
光學精密工程(2016年6期)2016-11-07 09:07:19
核科學與工程(2015年4期)2015-09-26 11:59:03
