磁導航巡檢機器人運動控制系統設計
2014-12-17 00:35:58聶鴻宇薛志航
中國測試 2014年1期
關鍵詞:變電站
聶鴻宇,劉 睿,薛志航
(1.國網四川省電力公司檢修公司,四川 成都 610052;2.國網四川省電力科學研究院,四川 成都 610041)
0 引 言
當前變電站巡檢主要為人工巡檢,該方法效率低、實時性差,并且在惡劣天氣下巡檢時,巡檢工人面臨人身危險。隨著移動機器人技術的發展,科研人員開始研制能攜帶檢測設備的機器人[1-3]代替人工進行巡檢。Sert B等[4]設計了基于激光導航的自動導引小車,濟南大學的楊森等[5]設計了一種基于軌線引導的巡檢機器人單目視覺導航控制方法,中國科學院沈陽自動化研究所研制一臺軌道式巡檢機器人[6]。
變電站處于室外,有高電壓和強電磁干擾,為確保巡檢機器人工作穩定可靠,穩定精確的運動控制和導航顯得尤為關鍵。針對四川省某變電站的實際情況,設計了一臺基于雙磁傳感器導航、差速驅動轉向的巡檢機器人,推導了其巡線控制算法并研制了樣機。
1 變電站巡檢機器人的總體結構
根據變電站巡檢環境與巡檢任務要求,變電站巡檢機器人系統主要由底盤驅動系統、機器人巡航定位模塊、自動充電模塊、嵌入式主控及擴展模塊、無線通信模塊、鋰電池及能源管理模塊、雙視系統云臺和機器人安全保障系統組成,如圖1所示。

圖1 巡檢機器人功能模塊
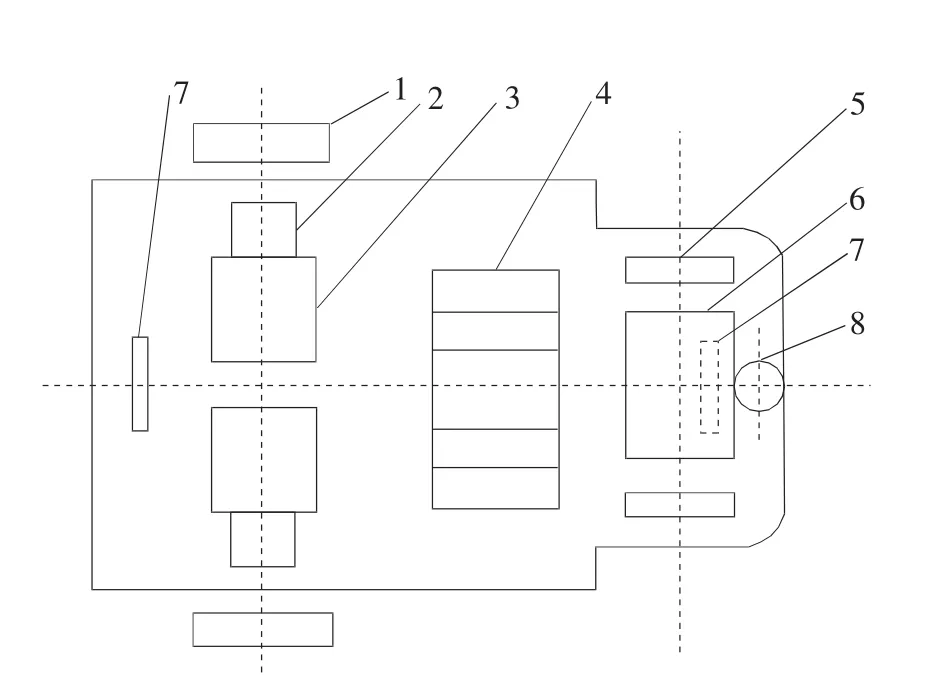
圖2 巡檢機器人底盤結構
變電站內路面為水泥地,機器人行進的速度為0.4~1m/s。根據巡檢機器人的工作環境及機動性需求,設計了如圖2所示的底盤。該底盤采用四輪支撐、兩輪差速驅動:在底盤的前部安裝了兩個萬向輪5,在底盤的后部安裝了兩個驅動輪1,通過兩驅動輪的輪差速可實現靈活轉彎。為了降低機器人上坡和下坡時傾覆的風險,把比較重的部件如蓄電池組4放置在底盤的正中間。底盤的最前端安裝有激光雷達8,用來探測機器人前進方向上是否有行人、電線桿等障礙,防止出現碰撞事故。
兩驅動輪采用空心可充氣膠胎,減輕了車體的重量,加強了減震效果。底盤具有轉彎半徑小,靈活性強的優點。
在底盤的前端和后端安裝有兩個磁傳感器7,機器人運行時,磁傳感器不斷感應鋪設在巡檢路徑上的磁條信息。位于磁條垂直上方的采樣點感應到磁條信號并輸出相應狀態,機器人控制系統借此可得到車體軸線與既定巡檢路徑的偏差,并對驅動輪4的轉速進行調節,以保證機器人始終行駛在既定的巡檢路徑上。磁條是永磁鐵,不受環境光線、溫度、濕度、天氣條件、場地路面的影響;另外,磁導航信號容易收集,故采用此控制方法比較簡單。本文設計的系統為雙磁傳感器導航,在機器人車體前方和后方的底部各安裝一個磁傳感器。
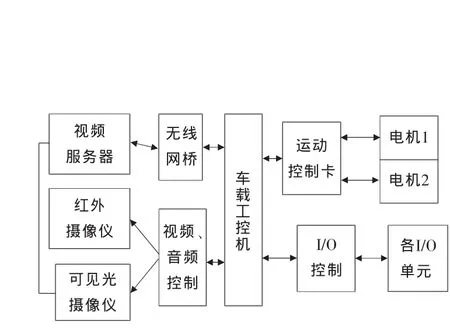
圖3 控制系統硬件組成
2 控制系統
控制系統是巡檢機器人系統的核心。在研發和設計控制系統時,重點考慮外設的接口能力、體積、功耗和可靠性。
本機器人采用工業級嵌入式控制器XPAC8734,為接收外部傳感器和控制外部設備,還配置32路隔離數字量I/O模塊、16路繼電器輸出模塊和CANOpen通信模塊。該控制器采用無風扇設計,裝載嵌入式操作系統,穩定可靠。
直流電機伺服驅動控制器和直流電動機是機器人運動控制的核心部件,事關整機系統的可靠性,本項目選用以色列ELMO公司生產的軍工級直流電機伺服驅動控制器和瑞士MAXON公司生產的直流伺服電機。
機器人控制系統硬件結構如圖3所示。
3 巡線算法
巡檢機器人會因為車輪打滑等因素造成與預定的導航路徑發生偏差。為避免這種現象,可以在發生運動軌跡偏離時,通過實時調整驅動輪的速度,促使兩個驅動輪產生速度差,以此保證巡檢機器人的正常狀態,使小車可按原定軌跡行走。等到傳感器發出小車已經恢復到規定路線信號時,就可以繼續由控制器來操控車輪的運動速度。
基于上述原理,建立如圖4所示的運動模型。圖中P點為巡線機器人上的參考點,θ代表機器人的航向角。下面對此巡線機器人做出4點假設:
1)輪胎為剛性,不會產生變形。
2)輪與地面垂直接觸,忽略輪寬的影響。
3)運動過程中車輪只作滾動,無滑動現象。
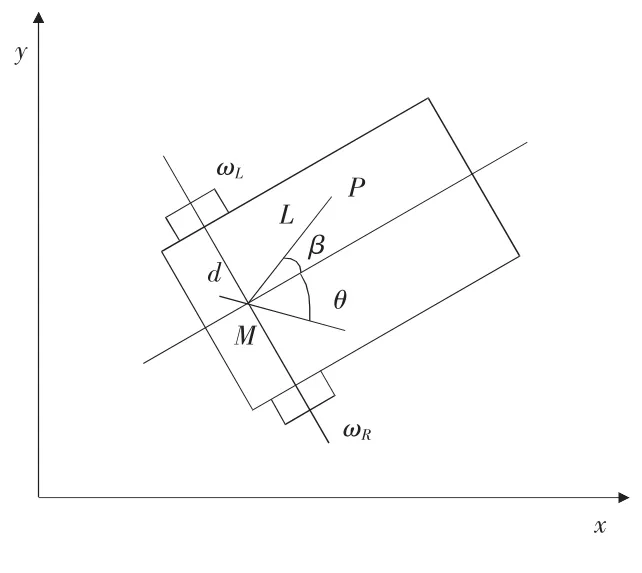
圖4 差速轉向模型圖
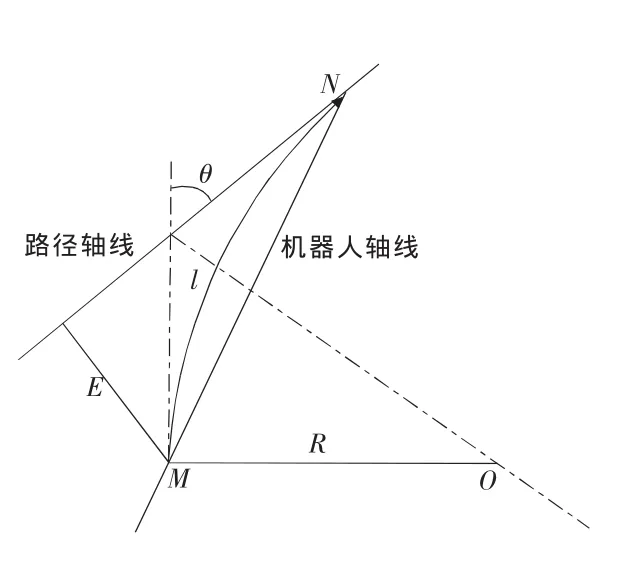
圖5 小車運動軌跡模型
4)兩個車輪尺寸相同,車軸中心線與車運動方向垂直。
根據上面的假定,小車的位置和狀態用向量q=(xp,yp,θ)T表示,小車上的參考點 P 在二維平面上的投影坐標是(xp,yp)。進一步假設:d為兩驅動輪之間的軸間距,r為驅動輪半徑,M為軸間連線的中心點,它的坐標為(xM,yM);L為參考點P與 M之間的距離,β為直線|PM|與平臺中軸線之間的夾角。由圖4可得:
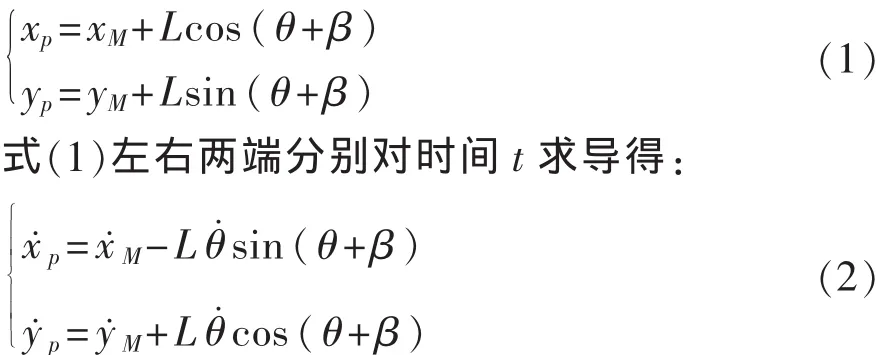
在上述假設前提下,圖4所示驅動模型可以簡化為居于軸連線中點M處的單輪滾動,則單輪所受的非完整約束為:

由式(2)和式(3)可得:

小車在運行中從頭至尾按照約束式(3)或式(4)的條件運動,因此保證了小車的瞬時速度方向和平臺朝向始終保持一致。只有控制兩個輪子之間的速度差來實現小車方向的改變。
在兩輪差速驅動的運動中,當它的瞬時速度方向與小車的前進方向一致時,小車可以僅通過改變兩輪的速度差來控制小車運動的方向和大小。由此得出,可以把圖4中的巡線機器人相對路徑的運動模型簡化,如圖5所示。
可以發現,巡線機器人上的參考點M與路徑軸線N之間的偏距和偏角分別為E和θ。巡線機器人如果想要回到它的理想軌跡,在后面的運動中就必須要避免出現這樣的偏差,在眾多的路徑中,只有沿軌跡1行走才是比較平滑穩定的方式,軌跡1是點M和點N之間的圓弧,點M和點N為切點,R為半徑,O為圓心,根據的幾何關系可得:

結合式(4)、式(5)可得:

在設定并保持小車速度ν不變的情況下,即ν=(ωRr+ωLr)/2為定值的基礎上,按照小車當前狀態,將兩輪轉速差設定為Δω時,小車將沿軌跡1平滑地回到其理想軌跡,所需的時間計算如下:

綜上所述,在巡線機器人保持一種固定線速不變的情況下,可以依據小車所產生的偏距E和偏角θ得出左右兩輪之間的旋轉角速度差值Δω與運動時間t,由此可以實現巡線機器人重返正確的運行軌道。
4 試驗研究
為驗證本巡檢機器人巡線算法的有效性,開展巡線試驗。
機器人以不同速度巡線時誤差如表1所示,表中E代表誤差的平均值。可以看出,隨著機器人速度的增大,偏距E的均值在變大,這是因為小車對自身狀態的判斷需要時間,指令執行機構也需要反應時間,而速度越大,機器人在這段時間內運動的距離越遠,則可能導致的偏距E變大,運動不穩定性增強,甚至偏出路徑。本文小車的偏距E整體誤差較小,運動可靠。
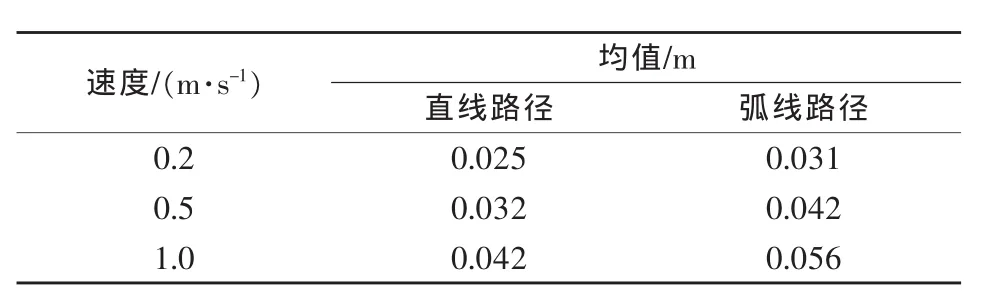
表1 巡線機器人循線誤差(偏距E)
5 結束語
研制了一款基于嵌入式車載工控機、雙磁導航傳感器反饋巡線偏差及雙電機差速驅動糾偏的變電站巡檢機器人,具有巡線精度高、可靠性好的特點,成功應用于變電站設備巡檢。
[1] 史晨紅,左敦穩,張國家.基于軌跡控制的AGV運動控制器設計研究[J].機械設計與制造工程,2014(2):7-12.
[2] 武星,樓佩煌,唐敦兵.自動導引車路徑跟蹤和伺服控制的混合運動控制[J].機械工程學報,2011(3):43-48.
[3] 彭光清,樓佩煌.磁導航AGV模糊控制器的研究[J].工業控制計算機,2012(9):43-44.
[4] Sert B, Maddox J, Veatch P.Laser assisted intelligent guidance for automated guided vehicles[A].Intelligent Vehicles Symposium,1993(93):201-206.
[5] 楊森,董吉文,魯守銀.變電站設備巡檢機器人視覺導航方法[J].電網技術,2009(3):11-15.
[6] 王挺.全國首臺軌道式變電站巡檢機器人投入試運行[J].電氣技術,2012(2):88.
猜你喜歡
電子制作(2019年10期)2019-06-17 11:44:56
電子制作(2018年8期)2018-06-26 06:43:34
電子制作(2017年8期)2017-06-05 09:36:15
電子制作(2017年24期)2017-02-02 07:14:44
現代工業經濟和信息化(2016年5期)2016-05-17 05:35:57
東北電力技術(2016年2期)2016-05-17 04:32:54
河南電力(2015年5期)2015-06-08 06:01:45
中國工程咨詢(2015年10期)2015-02-14 05:57:34
水電站機電技術(2014年1期)2014-09-26 11:59:53
中國機械(2014年15期)2014-04-29 00:09:45