單軸振動臺振動質量的改進
2014-12-17 00:36:38張博,姚烈
中國測試 2014年1期
張 博,姚 烈
(上海汽車股份有限公司乘用車分公司技術中心,上海 201804)
0 引 言
垂向振動對于大多數車身內外飾零部件來說是車輛行駛在道路上的主要振動能量來源,垂向振動臺就是模擬道路垂向振動輸入的試驗設備,具有結構簡單、成本低、易于控制等優點,得到了廣泛應用。
目前,應用較多的垂向振動臺為電磁振動臺。電磁振動臺振動頻帶較寬,一般為5~1000Hz,有的甚至更高,出力較小,且控制器方式簡單,只能設置功率譜做隨機振動,無法進行迭代實時路譜試驗。另一種應用較普遍的振動臺原理是液壓,多為多自由度控制,控制復雜可進行道路模擬試驗,振動臺振動頻帶較低(0.5~50Hz),出力較高。隨著靜液壓軸承作動缸的出現,液壓作動缸的頻帶可以高達200Hz甚至500Hz,如果以靜壓軸承作動缸為振動源集成為單軸垂向振動臺,既可以兼顧低頻振動又可以進行迭代實時路譜道路模擬試驗,對零部件的試驗認證有很大的幫助。針對此,本文設計了一個單軸垂向振動臺。
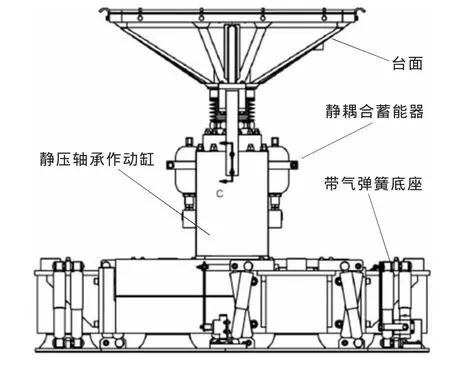
圖1 單軸振動臺
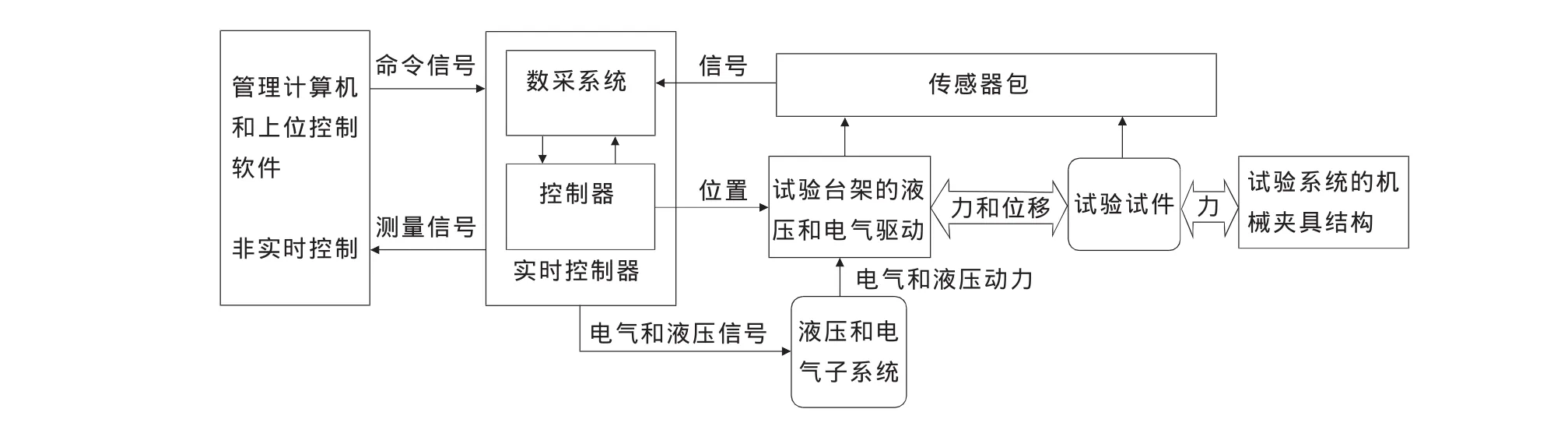
圖2 控制原理圖

圖3 驗收關鍵信號反饋圖
1 系統構成及原理
單軸垂向振動臺結構示意圖如圖1所示,其控制原理[1-3]如圖2所示。
2 項目驗收問題
試驗臺驗收做道路模擬試驗比較順利,做2.5g(5~20Hz)掃頻試驗時,發現實際調試中臺面加速度反饋信號不能接受,如圖3所示。
可以看出,臺面加速度在波峰和波谷中有巨大的波動,且不平滑。前期分析的故障可能和伺服閥的非線性、氣彈簧系數以及作動缸內的庫倫摩擦力有關。
3 系統工作機理及仿真模型的建立
振動源雙桿活塞式液壓缸,結構如圖4所示。活塞兩側都裝有活塞桿,由于兩腔的有效面積相等,故活塞往返的作用力和運動速度相等,其運動數學關系[4]如下式所示:

式中作動缸出力為左右腔室的壓差乘以有效面積A,P1為左側腔室壓力,P2為右側腔室壓力,有效面積A為活塞面積減柱塞面積。

假設液壓油不可壓縮,柱塞的運動速度就是流入作動缸的總流量除以有效面積,如式(2)所示。那么對柱塞速度微分就得到了柱塞的加速度。由于作動缸的柱塞和振動臺面是剛性連接,柱塞的加速度就是振動臺面的加速度,如下式所示:

圖4 液壓振動工作原理圖
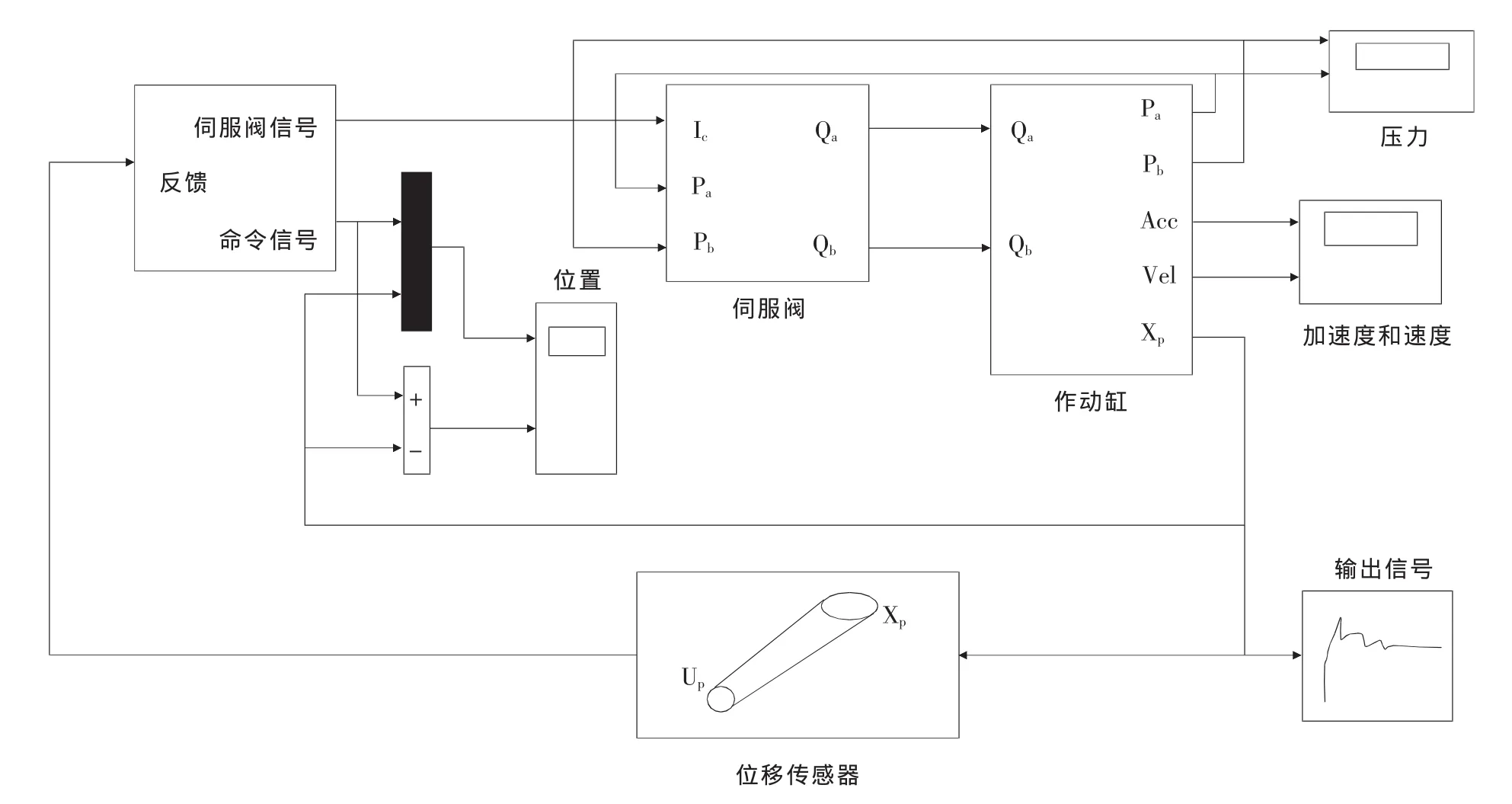
圖5 仿真模型原理圖

伺服閥的控制電流與流量成正比,速度的微分為加速度,阻塞面積一定,可以找到伺服閥控制電流與臺面加速度的數學關系[5-6],從而達到有效控制的目的,進而可以構建模型構架圖[7-8],如圖5所示。
模擬模型主要包括伺服閥模型、作動缸模型和控制器。作動缸模型還包括作動缸動態模型和作動缸安裝底座的動態模型,氣囊也是要考慮的,也包含非線性因素的伺服閥,伺服閥性能曲線在伺服閥性能試驗機上獲得,該設備應用的相同伺服閥性能曲線如圖6所示。X-Y軸沒有單位,這就需要在仿真模型中調節刻度。根據仿真模型,控制器為常規比例控制,事實上控制器的結構只會對以上問題有微小的影響。
4 仿真試驗及結果
針對可能引起該驗收問題的原因,設計了4個仿真試驗,利用模型檢測這些參數對最后試驗結果的影響。
1)考慮伺服閥的非線性因素,分別輸入線性的和非線性的伺服閥曲線,觀察最后加速度反饋結果。
2)逐漸增加氣彈簧的系數,觀察最后加速度反饋結果。
3)逐漸增加氣彈簧的系數庫倫摩擦力,觀察最后加速度反饋結果。
4)逐漸增加彈簧載荷,觀察最后加速度反饋結果。
4.1 伺服閥非線性因素影響
當不考慮伺服閥的非線性時,加速度的信號如圖7所示,信號很完美。但是,由于圖6中伺服閥的非線性,雖然控制參數鎖定了,但是伺服閥流量變成非線性。當非線性發生在零點附近時,作動缸的兩個腔室的壓力會下降,從而影響伺服閥的控制流量導致波動,從而加速度會隨著流量的波動而波動,如圖8所示。這說明伺服閥的非線性確實是加速度反饋不穩的一個原因。
4.2 氣彈簧參數影響
在仿真模型中,將氣彈簧的系數由實際的2e8逐漸增加到2e10,加速度反饋如圖9所示,對比圖3的加速度輸出,表明加速度和彈簧系數關系不大。
4.3 庫倫摩擦力影響

圖6 三級伺服閥特性曲線

圖7 排除伺服閥的非線性因素
當庫倫摩擦力在50~200N范圍內變化時,臺面加速度如圖10所示,與圖8變化相比,發現庫倫摩擦力對臺面加速度有微小影響,有必要降低庫倫摩擦力以促進加速度反饋信號質量;但事實上試驗用的作動缸是靜壓軸承作動缸,實際摩擦力不會超過5N,這樣庫倫摩擦力對加速度的輸出影響就可以忽略不計。

圖9 考慮彈簧力影響因素

圖10 考慮庫倫摩擦力影響因素
4.4 彈簧載荷影響
當作動缸的球頭和臺面的連接比較松的時候,這個作用力就象一個作用于臺面的彈簧力,在仿真模型中改變彈簧力系數,變化范圍0~107N/m,最后加速度反饋如圖圖11所示,與圖8相比較,加速度反饋很相似但實際彈簧力系數不可能這么大,實際接近0,所以彈簧載荷的影響可以忽略不計。
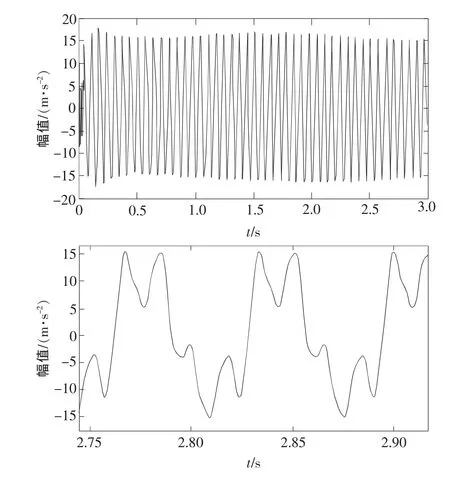
圖11 考慮彈簧載荷影響因素
5 結束語
最后針對數學模型推測的因素依次進行試驗認證:1)調換線性度好的伺服閥;2)關閉開啟氣彈簧;3)測量空載庫倫力;4)調節彈簧載荷等方法,收集臺面加速度反饋。最后得出結論:伺服閥非線性因素是影響作動缸輸出(位移、速度、加速度)質量的主要原因,因此更換線性度好的伺服閥,可以解決振動質量的問題。
另外,由于線性度好的伺服閥流量一般比較小,適合做振動異響試驗;而有非線性特性的伺服閥流量一般比較大,適合做道路模擬試驗。所以,在不同試驗時,伺服閥需要切換以滿足不同類型的試驗以確保試驗質量。
[1] 顧柏良.汽車工程手冊-試驗篇[M].北京:人民交通出版社,2001:699-705.
[2] 成大先.機械設計手冊-液壓控制[M].北京:化學工業出版社出版,2004:85-89.
[3] Katsuhiko O.現代控制工程[M].3版.盧伯英,于海勛,譯.北京:電子工業出版社,2001:235-242.
[4] 王守城.液壓傳動[M].北京:北京大學出版社,2006:91-94.
[5] 左建民.液壓與氣壓傳動[M].3版.北京:機械工業出版社,2005:23-36.
[6] 賈銘新.液壓傳動與控制[M].北京:國防工業出版社,2001:55-68.
[7] 能超.計算方法-算法設計及其Matlab實現[M].2版.武漢:華中科技大學出版社,2010:249-256.
[8] Mohand M,Michel M.Matlab與Simulink工程應用[M].趙彥玲,吳淑紅,譯.北京:電子工業出版社,2002:3-11.
[9] Elmar S.電測技術[M].殳偉群,譯.北京:電子工業出版社出版,2005:41-42.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
科學大眾(2023年17期)2023-10-26 07:39:14
艦船科學技術(2022年8期)2022-06-05 07:36:28
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
瘋狂英語·新讀寫(2020年3期)2020-06-06 09:05:56
數學物理學報(2020年2期)2020-06-02 11:29:24
中國公路(2017年18期)2018-01-23 03:00:38
數學物理學報(2017年6期)2018-01-22 02:26:40
光學精密工程(2016年6期)2016-11-07 09:07:19
核科學與工程(2015年4期)2015-09-26 11:59:03