基于一級倒立擺模型仿人機器人控制算法研究*
2014-12-10 05:37:46姜大偉王華振譚海東
電子技術應用 2014年12期
胡 靜 ,姜大偉 ,王華振 ,姚 禹 ,譚海東
(1.長春工業大學 軟件職業技術學院,吉林 長春 130012;2.長春工業大學 機電工程學院,吉林 長春 130012)
0 引言
仿人機器人是機器人研究領域中的一個重要分支,仿人機器人的步態行走系統是在以往深入研究仿人行走系統的各項技術環節,以提高仿人機器人行走環節的擬人化程度,使其各項功能最大程度地接近人類運動,從而保證仿人機器人在不同環境下完成任務的能力的基礎上提出的,是步行機器人研究中的一個重要而又關鍵的技術。但是仿人機器人的步態行走系統是一個多變量、非線性、強耦合的復雜動力學系統,要實現和提高機器人的行走性能,必須研究實用而有效的步態控制方法,實現機器人的實時穩定步行[1-2]。很多學者采用較少的變量來獲得仿人機器人的步態行走軌跡,將倒立擺模型應用于機器人步態規劃中,取得滿意的控制效果[3-5]。
本文在深入研究倒立擺模型基礎上,應用PID控制算法對仿人行走系統進行控制,并在開發以STM32+CPLD為核心19軸集成運動控制平臺中進行驗證,通過對比理論與原理樣機實驗數值,關節輸出最大相對誤差為2.25%,表明了該控制方法的準確性和有效性。
1 仿人機器人行走問題描述
設計的10自由度仿人行走系統的機構模型如圖1所示。
采用左右腿對稱的結構方式。以右腿為例,其自由度分配為:髖關節2個自由度,膝關節1個自由度,踝關節2個自由度。主要結構參數:大腿長度:214 mm;小腿長度:214 mm;腳部長度:55 mm;大腿質量:6.5 kg;小腿質量:3.5 kg;腳部質量:2.5 kg。仿人行走系統的運動過程為:上位機下達控制指令給驅動電機;驅動電機通過同步齒形帶驅動各關節轉動,從而實現仿人行走系統的步行運動。各關節輸出范圍如表1所示。驅動電機主要參數如表2所示,驅動電機輸出端安裝減速比為1:50的減速器,提高了電機的最大力矩值。
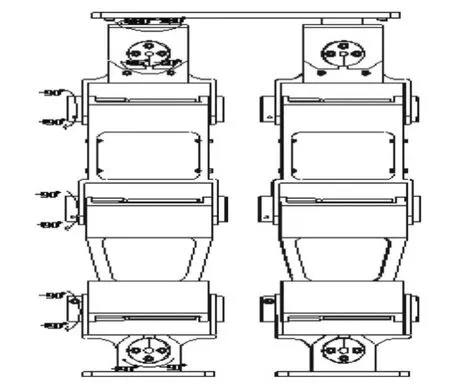
圖1 10自由度仿人行走系統的機構模型

表1 仿人行走系統各關節輸出范圍

表2 57號步進電機技術參數
2 基于倒立擺模型的仿人機器人數學模型的建立
和人類步行相似,仿人機器人的步態行走是機器人的重心由支撐腿向前運動,擺動腿由支撐腿的后方擺到支撐腿的前方,兩條腿的交換在瞬間完成的。在這樣的行走過程中,將仿人機器人行走系統簡化為一個倒立擺模型[6],如圖 2所示。

圖2 倒立擺模型
質量為m的小球固結于長度為L的細桿(可忽略桿的質量)上,細桿又和質量為M的小車鉸接相連。通過控制施加在小車上的力F(包括大小和方向)能夠使細桿處于θ=0的穩定倒立狀態。在忽略其他零件的質量以及各種摩擦和阻尼的條件下,推導小車倒立擺系統的數學模型。設細桿擺沿順時針方向轉動為正方向,水平向右方向為水平方向上的正方向。當細桿擺順時針往右運動時水平方向施加的力應該為水平向右。
現對小車和細桿擺分別進行隔離受力分析:
對小車有:
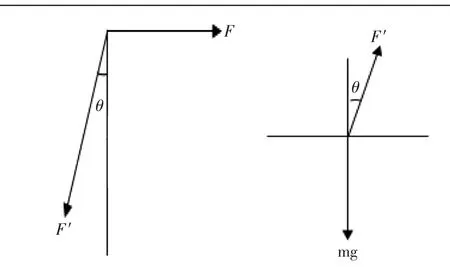
圖3 小車和小球的受力分析圖

對小球水平方向受力為:

式中 s=x+l sinθ。 由式(1)、(2)得:

小球垂直方向受力為:

由式(3)、式(4)得:

故可得以下運動方程組:
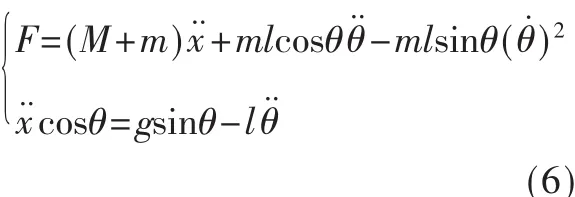
以上方程組為非線性方程組,故需做如下線性化處理:

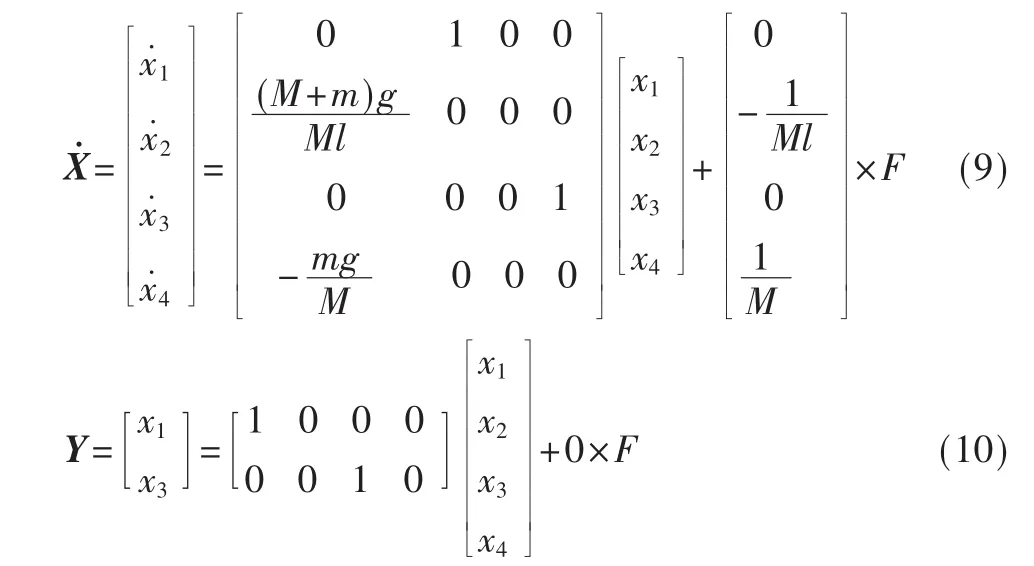
下面進行系統狀態空間方程的求解:以擺角 θ、角速度θ˙、小車位移 x、加速度x¨為系統狀態變量,Y為輸出,F為輸入。
由線性化后運動方程組得:
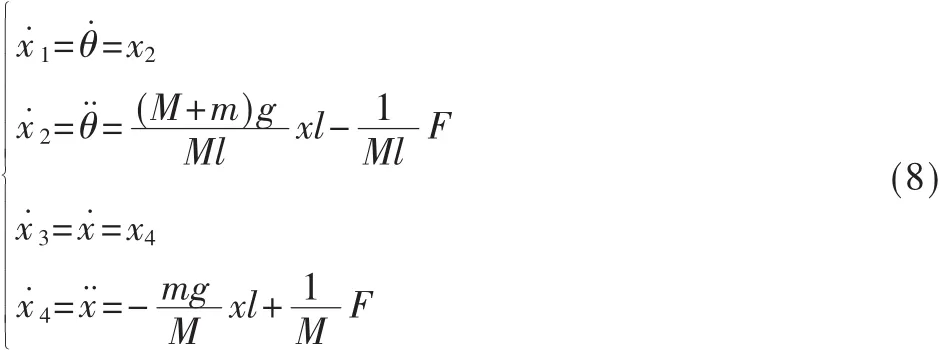
故空間狀態方程如下:
用MATLAB將狀態方程轉化成傳遞函數,取M=2 kg,m=0.1 kg,l=0.5 m代入,可以得出角度對力 F的傳遞函數為:

位移X對外力F的傳遞函數為:

3 仿人機器人步態行走控制器的設計
3.1 PID控制器的設計
由上節對倒立擺模型的描述,仿人機器人的步態行走要求它的姿態角達到一個期望值,當仿人機器人受到干擾離開期望值時,如果姿態角不能及時恢復,仿人機器人姿態失衡,最終會導致機器人行走失敗。為了使仿人機器人姿態角穩定在期望值,保持仿人機器人姿態平衡,實現仿人機器人穩定行走的目的,本文采用以仿人機器人姿態角和位移實現雙閉環的PID控制算法[7-8],干預姿態角和位移的變化,使其始終保持在穩定狀態,從而實現仿人機器人的穩定步態行走。
PID控制器是一種線性控制器,它將給定值r(t)與實際輸出值 c(r)的偏差的比例(P)、積分(I)、微分(D)通過線性組合構成控制量,對控制對象進行控制。是一種應用較為廣泛的控制算法,其控制性能優越,結構簡單,方便調節[9]。PID調節器各校正環節的主要作用有:
(1)比例環節:偏差一旦產生,調節器立即產生控制作用以減小偏差即時成比例地反應控制系統的偏差信號e(t)。
(2)積分環節:主要用于消除靜差,積分作用的強弱取決于積分時間常數,進提高系統的無差度。
(3)微分環節:能反應偏差信號的變化趨勢(變化速率),相當于引入一個有效的早期修正信號,從而加快系統的動作速度,減小調節時間。
首先,建立PID控制器的微分方程為:

式中,e(t)=r(t)-c(t)。
再得到PID控制器的傳遞函數為:

3.2 PID控制器參數調節
在MATLAB/Simulink中建立仿人機器人模型,同時采用試湊法對PID參數進行調節[10]。首先,建立沒校正之前的θ-F單閉環控制系統,由于未加進控制環節,故系統輸出極易發散。給系統加入PID控制環節,如圖4所示。
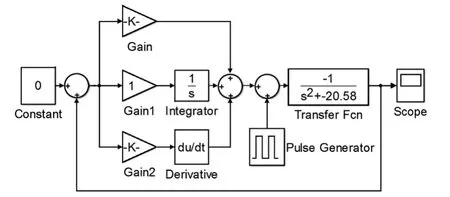
圖4 θ-F單閉環控制系統框圖
設置系統穩定值為0,給系統一個初始干擾沖擊信號,采用試湊法不斷調整PID參數,當系統在時域內達到穩定后,進行離散化分析,建立離散模型系統控制框圖如圖5所示。
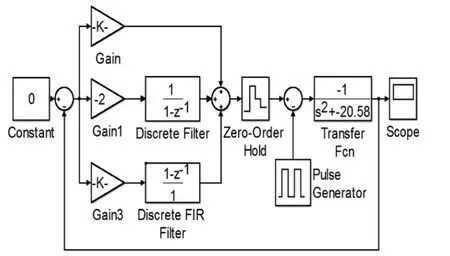
圖5 離散模型系統控制框圖
如圖6所示,經調節后,當 Kp=-110,Ti=-4,Td=-1 500,系統響應穩定,超調<0.3%,調節時間<0.2 s。至此,離散域的控制參數調節順利實現。圖7為建立的仿人機器人雙閉環控制系統。
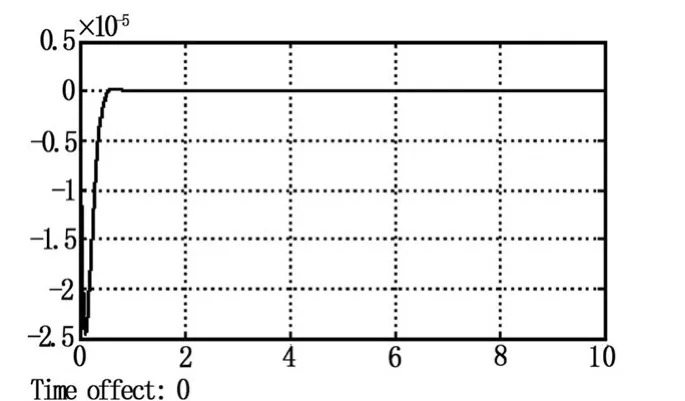
圖6 控制系統響應曲線圖
4 仿人機器人步態實驗
4.1 仿人行走系統控制系統硬件
仿人機器人運動控制器在增加了CPLD芯片后,控制系統如圖8所示。實驗目的是驗證本文所提PID控制器的合理性及準確性,該仿人機器人下肢有10個自由度,上肢有9個自由度,以STM32+CPLD為核心的控制系統總體方案,單一的關節控制可以使用一個51單片機芯片最小控制系統,控制步進電機運動[11]。
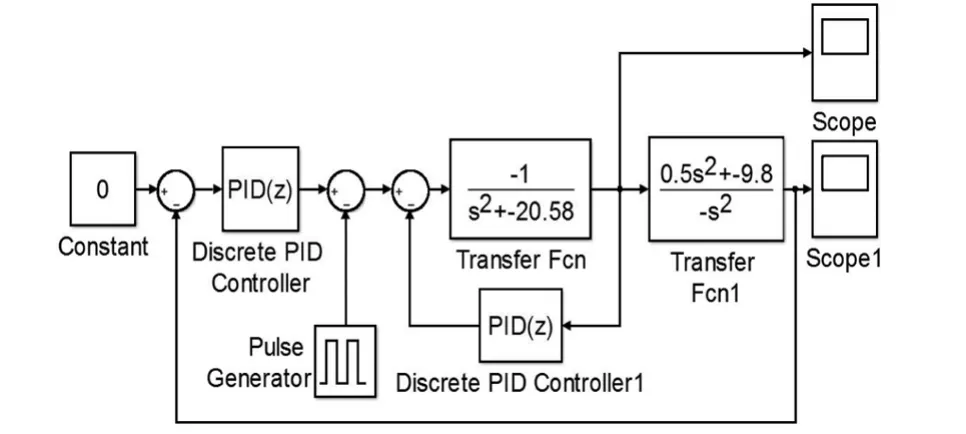
圖7 位移-角度控制系統框圖

圖8 19自由度控制系統簡圖
4.2 數值對比結果分析
調節行走系統原理樣機末端執行器位姿為給定位姿gs3T3(θ)。通過編碼器和傾角傳感器測得行走系統各關節輸出。比較數據值,如表 3所示。
通過驗證數值對比結果得出,關節輸出最大相對誤差為2.25%,表明了本文采用仿人機器人步態行走系統PID控制算法的正確性及高精確度。
5 結論
本文針對仿人機器人步態行走不穩定的問題,以倒立擺為控制對象,建立仿人機器人步態行走數學模型。在建立數學模型時,首先用牛頓—歐拉方法建立數學模型,而后用動態系統空間狀態方程法導出狀態方程系數矩陣,然后用MATLAB對數學模型進行從狀態空間到傳遞函數的變換(包括傳遞函數的拉氏變換與Z變換),得到系統的傳遞函數模型。最后建立仿人機器人姿態角和位移的雙閉環控制系統,采用PID控制算法對仿人機器人姿態角和位移進行調節。系統響應穩定,超調量<0.3%,調節時間<0.2 s,得到滿意的控制效果。以19自由度仿人機器人進行實驗驗證,其關節的輸出相對誤差最大為2.25%,可實現仿人機器人穩定的步態行走,表明了本文采用仿人機器人步態行走系統PID控制算法的正確性及高精確度。
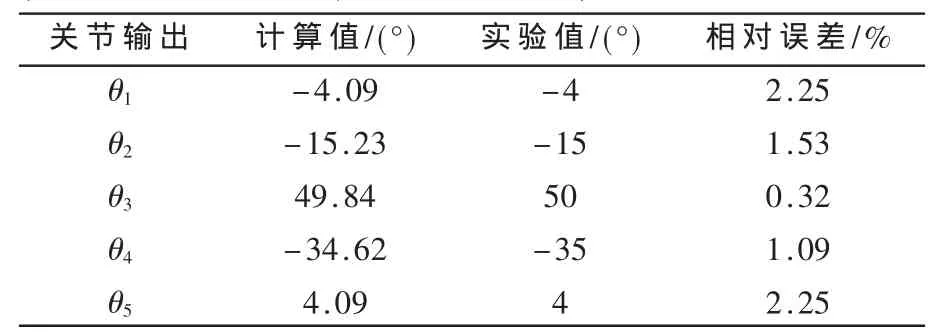
表3 右腿各關節輸出的計算值與實驗值比較
[1]畢盛,閔華清,陳強.仿人機器人步態規劃反饋控制研究綜述[J].計算機工程與應用,2011(7):30-33.
[2]付根平,楊宜民,李靜.仿人機器人的步行控制方法綜述及展望[J].機床與液壓,2011(23):154-159.
[3]Tang Zhe,ER M J.Humanoid 3D gait generationbased on inverted pendulum model[C].22nd IEEE International Symposium on Intelligent Control Part of IEEE Multi-conference on Systems and Control,2007.
[4]畢盛,閔華清,陳強,等.一種仿人機器人斜坡運動步態規劃方法[J].華南理工大學學報(自然科學版),2010(11):148-154,160.
[5]李龍澍,王唯翔,王凡.基于三維線性倒立擺的雙足機器人步態規劃[J].計算機技術與發展,2011(6):66-69.
[6]黎君,閻世梁.一級倒立擺模糊 PID控制器設計[J].國外電子測量技術,2012(4):50-52.
[7]郭宏,吳海洋,巫佩軍.基于變系數 PID的無刷直流電動機雙閉環系統[J].北京航空航天大學學報,2012(1):1-5.
[8]王啟源,阮曉鋼.獨輪自平衡機器人雙閉環非線性PID控制[J].控制與決策,2012(4):593-597.
[9]劉慧博,王靜,吳彥合.無刷直流電機模糊自適應 PID控制研究與仿真[J].控制工程,2014(4):583-587.
[10]張斌,姚有峰.基于串行總線下最小控制系統實現方式的研究[J].現代電子技術,2009(11):149-151.
[11]袁安富,徐金琦,王偉,等.基于雙 STM32多旋翼無人機控制系統設計[J].電子技術應用,2013,39(11):136-138.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
光學精密工程(2016年6期)2016-11-07 09:07:19
