基于iCAN協(xié)議的嵌入式從站模塊設(shè)計(jì)
2014-12-07 06:19:00勾璇,尹崗
電子技術(shù)應(yīng)用 2014年3期
關(guān)鍵詞:設(shè)置設(shè)計(jì)
勾 璇,尹 崗
(內(nèi)蒙古工業(yè)大學(xué) 電力學(xué)院,內(nèi)蒙古 呼和浩特 010080)
在工業(yè)控制系統(tǒng)網(wǎng)絡(luò)化趨勢下,工業(yè)控制系統(tǒng)逐漸采用更加徹底的分布式結(jié)構(gòu),而在這個發(fā)展過程中,現(xiàn)場總線的應(yīng)用起到了主導(dǎo)作用[1]。作為市場上占有率很高的現(xiàn)場總線之一,CAN-bus總線憑借其良好的開放性、可靠性和實(shí)時性以及較低的成本,在工業(yè)控制、遠(yuǎn)程數(shù)據(jù)傳輸?shù)阮I(lǐng)域中獲得了廣泛應(yīng)用[2]。
iCAN(Industrial CAN)協(xié)議即 “工業(yè)CAN應(yīng)用層協(xié)議”是我國自行研發(fā)的現(xiàn)場總線技術(shù)標(biāo)準(zhǔn),它的物理層和數(shù)據(jù)鏈路層完全兼容CAN2.0B協(xié)議規(guī)范。iCAN協(xié)議優(yōu)先保障通信數(shù)據(jù)的可靠性與實(shí)時性,以相對簡單的方式進(jìn)行數(shù)據(jù)通信,有效降低了硬件實(shí)現(xiàn)成本。它的出現(xiàn)為中國中小型CAN-bus應(yīng)用網(wǎng)絡(luò)提供出一種簡單、可靠、穩(wěn)定的應(yīng)用層協(xié)議,更為可貴的是iCAN協(xié)議是我國具有完全自主知識產(chǎn)權(quán)的總線協(xié)議,它為我國開發(fā)具有自主知識產(chǎn)權(quán)的現(xiàn)場總線技術(shù)標(biāo)準(zhǔn)提供了寶貴的經(jīng)驗(yàn)[3]。
本設(shè)計(jì)采用NXP公司的LPC11C14微處理器作為模塊核心,這是一種內(nèi)嵌CAN控制器的32位ARM芯片。初始化后,LPC11C14將進(jìn)行數(shù)據(jù)信號的采集,基于iCAN協(xié)議的報(bào)文解析與打包,并完成于主站的通信功能。
1 總體方案設(shè)計(jì)
1.1 基本結(jié)構(gòu)及功能
基于iCAN協(xié)議的嵌入式從站模塊 (以下簡稱iCAN從站模塊)由三部分組成:微處理器系統(tǒng)模塊、CAN總線通信模塊、本地應(yīng)用電路。從站模塊功能結(jié)構(gòu)圖如圖1所示。

圖1 從站模塊功能結(jié)構(gòu)圖
iCAN從站模塊中選用的微處理器LPC11C14內(nèi)部嵌入CAN控制器,因此微處理器系統(tǒng)包括微處理器及CAN控制器兩部分。iCAN從站模塊主要完成三部分功能:(1)通過本地應(yīng)用電路將不同的應(yīng)用對象的各功能單元連入iCAN總線,應(yīng)用對象包括4路模擬量輸入、4路模擬量輸出、8路數(shù)字量輸入和8路數(shù)字量輸出;(2)通過CAN收發(fā)器與iCAN主站相連,將采集到的數(shù)據(jù)上傳至主站或執(zhí)行主站下達(dá)的命令;(3)通過串行接口與上位PC機(jī)相連,完成對模塊用戶參數(shù)的配置。
1.2 模塊硬件電路設(shè)計(jì)
iCAN從站模塊的硬件結(jié)構(gòu)框圖如圖2所示,主要包括微處理器、通用輸入輸出模塊、CAN通信模塊、UART通信模塊、存儲器擴(kuò)展模塊及各基礎(chǔ)電路模塊。微處理器采用基于Cortex內(nèi)核的ARM芯片LPC11C14,其內(nèi)置1路CAN控制器,通過外接 CAN收發(fā)器可方便地進(jìn)行 CAN數(shù)據(jù)收發(fā)。通用輸入輸出模塊設(shè)計(jì)了8路數(shù)字量輸入端口、8路數(shù)字量輸出端口、4路模擬量輸入端口、4路PWM輸出端口,這樣即可滿足在不同工業(yè)環(huán)境下對接口的要求。LPC11C14芯片擁有8通道10位AD轉(zhuǎn)換器,它們可在8個引腳中實(shí)現(xiàn)輸入多路復(fù)用,利用該芯片這一優(yōu)勢,本模塊設(shè)計(jì)了4路模擬量輸入。模塊初次上電時,用戶可在PC上通過串口調(diào)試助手對模塊基本參數(shù)進(jìn)行設(shè)置,這些參數(shù)包括:節(jié)點(diǎn)MACID、CAN通信波特率、A/D采樣次數(shù)、PWM周期。模塊的用戶參數(shù)設(shè)置數(shù)據(jù)通過存儲器擴(kuò)展模塊進(jìn)行保存,當(dāng)模塊再次上電時將從片外存儲器中讀取已保存數(shù)據(jù)進(jìn)行初始化。
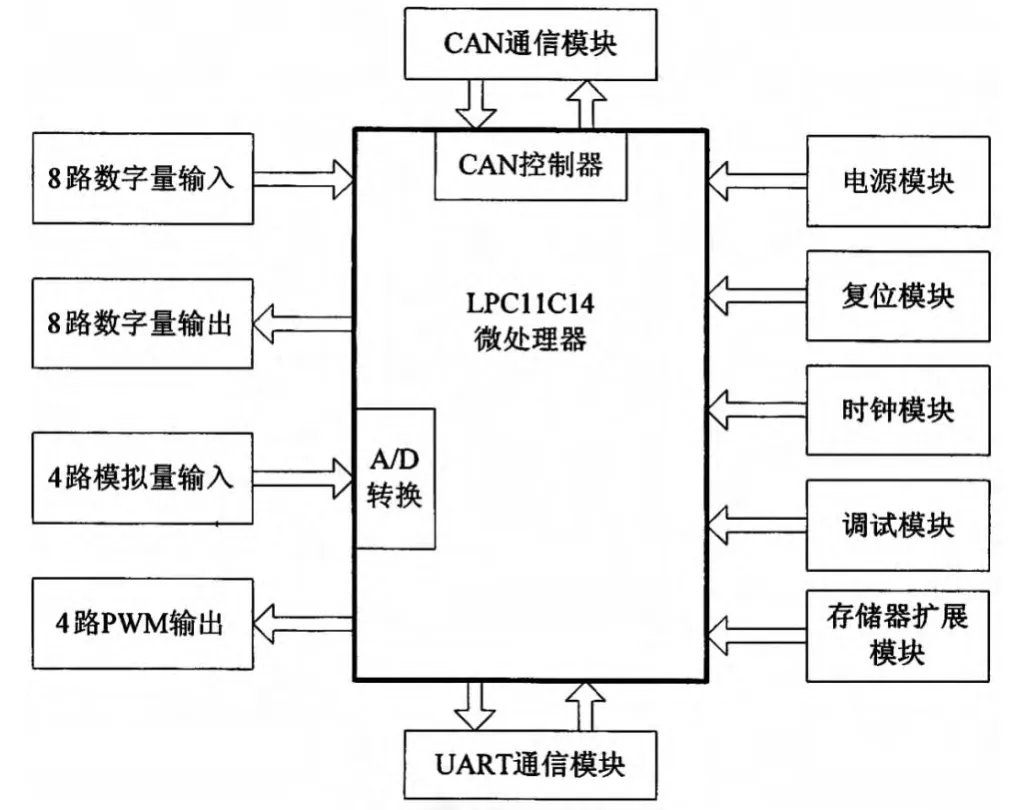
圖2 從站模塊硬件結(jié)構(gòu)圖
1.2.1 器件選型
為提高模塊的實(shí)時性和可靠性,iCAN從站模塊選用NXP公司推出的Cortex-M0內(nèi)核微處理器 LPC11C14,工作頻率高達(dá)50 MHz,運(yùn)算控制能力較強(qiáng),每秒可以執(zhí)行超過4 500萬條指令,并且配有SWD調(diào)試功能;同時這款芯片擁有4個通用定時器,16位和32位各兩個,均帶有PWM輸出/匹配/捕捉功能;另外芯片擁有8通道10位ADC,它們可在8個引腳中實(shí)現(xiàn)輸入多路復(fù)用,并且10位轉(zhuǎn)換時間最小僅為2.44μs;芯片的這些特點(diǎn)輕松滿足了模塊對通用接口上的要求[4]。除此之外,LPC11C14這款芯片是針對控制局域網(wǎng)(CAN)2.0B標(biāo)準(zhǔn)研制的,集成了C_CAN控制器,是業(yè)界首款在片上直接支持CAN控制器的Cortex-M0微控制器,是目前市場上性價(jià)比最高的一款微處理器,從而解決了使用ARM微處理器所造成的成本提高的問題。
1.2.2 CAN總線通信模塊硬件設(shè)計(jì)
通過CAN總線通信模塊可使iCAN從站模塊和iCAN總站完成通信,實(shí)現(xiàn)將采集數(shù)據(jù)上傳或執(zhí)行主站下達(dá)的命令的任務(wù)。CAN總線接口硬件電路如圖3所示。

圖3 CAN通信接口電路原理圖
LPC11C14內(nèi)部集成有一個兼容CAN2.0B的CAN控制器,只需增加一個 CAN總線收發(fā)器就能滿足設(shè)計(jì)要求。ISO1050是TI公司的電氣隔離式CAN收發(fā)器,此器件有一個被硅二極管絕緣隔柵分開的邏輯輸入和輸出緩沖器,具有DC 2500V的隔離功能。ISO1050DUB的輸入電源與輸出電源之間必須用電源隔離模塊隔開,但由于本模塊硬件部分需要做到盡量小,因此電源隔離這部分需要用戶在底板上實(shí)現(xiàn)。為實(shí)現(xiàn)有效的瞬態(tài)保護(hù),在CAN信號輸出部分加了低電容瞬態(tài)電壓抑制器PSM712。PSM712可以保護(hù)收發(fā)器在瞬時高電壓情況下不受損壞。
2 軟件設(shè)計(jì)
2.1 主程序設(shè)計(jì)
iCAN從站模塊的主要功能是對外部數(shù)字/模擬輸入信號進(jìn)行循環(huán)采集,在接收到主站的命令幀時,向主站發(fā)送響應(yīng)幀并執(zhí)行命令。所有的功能都在一個主循環(huán)里實(shí)現(xiàn)。首先進(jìn)行各功能模塊的初始化,初始化完畢后判斷是否已進(jìn)行用戶參數(shù)配置,配置好參數(shù)后,檢測是否接收到有效CAN報(bào)文,若接收到則進(jìn)行報(bào)文處理。當(dāng)有中斷發(fā)生時,執(zhí)行中斷程序。主流程圖如圖4所示。
2.2 CAN模塊通信程序設(shè)計(jì)

圖4 主程序流程圖
基于LPC11Cxx系列的微控制器的ZLG_CAN通用驅(qū)動庫提供了完整、可靠的 CAN操作 API,調(diào)用 API既可以完成對CAN控制器和報(bào)文對象的配置,并實(shí)現(xiàn)CAN中斷的管理、CAN通信等工作。但是,通過ZLG_CAN通用驅(qū)動庫來進(jìn)行應(yīng)用編程,仍然涉及到十幾個底層接口函數(shù),不便于移植和維護(hù)。因此本設(shè)計(jì)中的CAN模塊編程部分采用了對通用驅(qū)動的函數(shù)進(jìn)行了進(jìn)一步封裝的zlg_can程序模塊,圖5為CAN模塊編程流程框圖。

圖5 基于zlg_can程序模塊編程
2.3 基于iCAN協(xié)議的報(bào)文處理程序設(shè)計(jì)
iCAN協(xié)議為CAN總線的應(yīng)用層協(xié)議,iCAN協(xié)議定義的通信方式是“面向節(jié)點(diǎn),基于連接的通信方式。面向節(jié)點(diǎn)是指源節(jié)點(diǎn)地址及目的節(jié)點(diǎn)地址均已給定,即對于任何一個報(bào)文參與通信的雙方是確定的,基于連接是指在網(wǎng)絡(luò)中任何一個參與通信的從站設(shè)備都必須和主站設(shè)備建立一個獨(dú)立的通信連接。這樣也為對任何一個設(shè)備的通信進(jìn)行監(jiān)控提供可能[5]。
此外,iCAN協(xié)議也是一種主從方式的協(xié)議。iCAN協(xié)議中規(guī)定了三種通信模式:(1)主從通信模式,主站對從站發(fā)送命令幀,從站模塊回發(fā)響應(yīng)幀來應(yīng)答。這種通信模式為本模塊的常態(tài)通信模式。(2)事件觸發(fā)通信模式,用于在從站模塊輸入端口狀態(tài)發(fā)生改變時,主動向主站傳送數(shù)據(jù)。這種通信模式彌補(bǔ)了主從通信模式下總線利用率低的問題。(3)定式循環(huán)傳送模式,用于從站模塊在固定的時間間隔(由主站設(shè)置)向主站傳送數(shù)據(jù)。
iCAN協(xié)議使用了擴(kuò)展幀格式CAN報(bào)文,對CAN報(bào)文的29位標(biāo)識符和報(bào)文數(shù)據(jù)都做了詳細(xì)規(guī)定。報(bào)文標(biāo)識符制定了數(shù)據(jù)通信中的源節(jié)點(diǎn)MACID和目標(biāo)節(jié)點(diǎn)MACID,并指示了報(bào)文的功能以及所要訪問的資源。在iCAN協(xié)議中,使用資源節(jié)點(diǎn)來對設(shè)備進(jìn)行描述,在iCAN網(wǎng)絡(luò)中,iCAN設(shè)備對iCAN主站而言就是許多資源節(jié)點(diǎn)的集合,通過資源節(jié)點(diǎn)主站和從站來完成數(shù)據(jù)交換[6]。iCAN標(biāo)識符分配如圖6所示。

圖6 iCAN標(biāo)識符分配
iCAN協(xié)議規(guī)定了7種功能碼,主要有連續(xù)寫端口、連續(xù)讀端口、事件觸發(fā)傳送、建立連接等,這部分軟件就基于這幾種功能碼進(jìn)行模塊化編寫。
iCAN協(xié)議通信方式是基于連接的,任何通信都是在連接的基礎(chǔ)上進(jìn)行建立連接是iCAN協(xié)議通信第一步,也是最重要的一步。這里介紹一下建立連接的程序流程,當(dāng)從站模塊接收到主站發(fā)來的建立連接命令幀時,首先判斷報(bào)文是否合法且從站模塊尚未與其他模塊建立連接,若報(bào)文非法或已處于連接狀態(tài),則向主站回發(fā)異常響應(yīng)報(bào)文;若通過判斷,則繼續(xù)判斷連接定時參數(shù)是否為零,若為零,則從站模塊直接與主站建立連接并回發(fā)正常響應(yīng)幀,若不為零,則先啟動連接定時器,再與主站建立連接回發(fā)報(bào)文。建立連接的程序流程圖如圖7所示。

圖7 “建立連接”處理流程圖
本設(shè)計(jì)中的iCAN從站模塊收發(fā)的數(shù)據(jù)均符合iCAN協(xié)議報(bào)文的格式,當(dāng)收到一幀CAN報(bào)文時,首先對其進(jìn)行報(bào)文解析,翻譯成iCAN協(xié)議規(guī)定的報(bào)文格式,再做處理;同樣,當(dāng)從站模塊要發(fā)送一幀報(bào)文時,首先需將iCAN報(bào)文翻譯成CAN報(bào)文,然后再經(jīng)過CAN通信程序進(jìn)行發(fā)送。
2.4 用戶參數(shù)配置軟件設(shè)計(jì)
從站模塊初次上電后,用戶需要對其基本參數(shù)進(jìn)行設(shè)置,可設(shè)置的參數(shù)包括:節(jié)點(diǎn) MACID、CAN通信波特率、A/D采樣次數(shù)、PWM周期。因此,進(jìn)行了“iCAN模塊用戶參數(shù)配置軟件”設(shè)計(jì),如圖8所示。點(diǎn)擊“恢復(fù)出廠設(shè)置”按鈕即將參數(shù)設(shè)置為:模塊節(jié)點(diǎn)編號01,CAN波特率設(shè)置為 500 kb/s,A/D采樣次數(shù)設(shè)置為 64,PWM周期設(shè)置為3(1 ms)。

圖8 iCAN模塊用戶參數(shù)配置軟件
3 系統(tǒng)調(diào)試與運(yùn)行
3.1 模塊硬件
iCAN從站模塊為核心模塊,用戶可根據(jù)自己的需求設(shè)計(jì)合適的底板,配合使用。這就要求本模塊體積要足夠小,因此本模塊按32 mm×32 mm的尺寸設(shè)計(jì),把數(shù)字量輸入輸出、模擬量輸入輸出都通過排針引出。由于面積小,器件較多,因此采用雙面貼片。
3.2 模塊軟件通信調(diào)試
將iCAN從站模塊插到測試底板上,將測試底板的CAN接口和USBCAN分析儀相連接,USBCAN分析儀的另一端連接PC(這里用PC模擬iCAN主站)。
打開iCAN模塊用戶參數(shù)配置軟件,設(shè)置好端口號,點(diǎn)擊“連接”按鈕,紅燈亮,表示串口已連接正常;然后填寫各參數(shù)預(yù)設(shè)置的數(shù)值,填好后點(diǎn)擊“寫入”按鈕,觀察“返回狀態(tài)顯示窗口”,若出現(xiàn)“WRITEOK”字樣即說明設(shè)置成功。
打開CANPro通信軟件,點(diǎn)擊“啟動”按鈕,彈出打開設(shè)備對話框,設(shè)備索引號設(shè)置為“0”,將波特率設(shè)置為500 Mb/s,與iCAN模塊波特率設(shè)置一致選中iCAN窗口,進(jìn)行下面的測試。
3.2.1 MAC ID檢測
硬件連接正常時,iCAN從站模塊上電后,主動向主站發(fā)送MAC ID檢測命令,以檢測iCAN從站模塊的節(jié)點(diǎn)號在網(wǎng)絡(luò)中是否唯一。若1 s內(nèi)未收到MAC ID檢測響應(yīng)幀,則iCAN模塊進(jìn)入可操作狀態(tài)。
3.2.2 建立連接
MAC ID檢測通過后,編號為“0”的主站節(jié)點(diǎn)發(fā)送“建立連接”命令幀,CyclicMaster這里設(shè)置為 0,表示不裝載連接定時器;從站收到正確的命令幀,返回響應(yīng)幀,數(shù)據(jù)部分分別為 DI、DO、AI、PWM 的數(shù)目,單位為 B;此時編號為2的節(jié)點(diǎn)又向iCAN從站模塊發(fā)送建立連接命令幀,iCAN從站模塊收到后,返回異常響應(yīng)幀,告知本節(jié)點(diǎn)已與其他節(jié)點(diǎn)建立連接。
3.2.3 采集模擬量輸入端口
iCAN從站模塊與主站建立連接后,就可與主站進(jìn)行通信,響應(yīng)主站命令。這里以采集模擬量輸入端口為例,介紹iCAN從站模塊的通信功能。
主站發(fā)送命令幀,讀取4路模擬量端口的輸入數(shù)據(jù),每路模擬量16 bit,用2 B表示,因此命令幀數(shù)據(jù)部分08表示讀取8 B數(shù)據(jù);iCAN從站模塊接收命令幀,在極短時間內(nèi)回發(fā)響應(yīng)幀,返回4路模擬量輸入端口的數(shù)值。
本設(shè)計(jì)在對iCAN總線協(xié)議深入研究的基礎(chǔ)上,結(jié)合經(jīng)濟(jì)性和實(shí)用性的原則,設(shè)計(jì)了一種基于iCAN協(xié)議的嵌入式從站模塊,使更多的研究者可拋開CAN-bus產(chǎn)品復(fù)雜的設(shè)計(jì)和漫長的測試過程,制造出適用于不同工業(yè)控制環(huán)境的產(chǎn)品,為進(jìn)一步開發(fā)設(shè)計(jì)基于CAN-bus產(chǎn)品提供了便利。
[1]周立功單片機(jī)發(fā)展有限公司.基于iCAN協(xié)議的CAN bus分布式控制系統(tǒng)[J].產(chǎn)業(yè)技術(shù)與信息,2006(4):84-85.
[2]陽憲惠.現(xiàn)場總線技術(shù)及其應(yīng)用[M].北京:清華大學(xué)出版社,2008.
[3]張健,蔣新華,陳興武.CAN總線在基于ARM嵌入式數(shù)控系統(tǒng)中的應(yīng)用[J].自動化與儀表,2008(7):25-27.
[4]廣州周立功單片機(jī)發(fā)展有限公司.深入淺出Cortex-M0—LPC1100系列[Z].2013.
[5]周立功.iCAN現(xiàn)場總線原理與應(yīng)用[M].北京:北京航空航天大學(xué)出版社,2007.
[6]馮江濤.基MCGS和iCAN的分布式監(jiān)控系統(tǒng)[J].工業(yè)控制計(jì)算機(jī),2008(2):18-19.
猜你喜歡
少先隊(duì)活動(2021年4期)2021-07-23 01:46:22
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
攝影之友(影像視覺)(2019年3期)2019-03-30 01:36:50
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
沈陽醫(yī)學(xué)院學(xué)報(bào)(2015年1期)2015-12-27 13:44:40
醫(yī)學(xué)教育管理(2015年3期)2015-12-01 06:43:16
中國艦船研究(2014年5期)2014-05-14 06:43:09