RFID防碰撞算法應(yīng)用研究
2014-11-29 08:40:34高增貊
鐵路計(jì)算機(jī)應(yīng)用 2014年7期
關(guān)鍵詞:信號(hào)
高增貊,路 勇
(北京交通大學(xué) 電子信息工程學(xué)院,北京 100044)
射頻識(shí)別技術(shù)(RFID, Radio Frequency Identification),又稱無(wú)線射頻識(shí)別,是一種基于應(yīng)答器與讀寫器間無(wú)線通信的自動(dòng)識(shí)別技術(shù)。RFID通過(guò)無(wú)線信號(hào)實(shí)現(xiàn)識(shí)別目標(biāo),讀取目標(biāo)數(shù)據(jù)和修改目標(biāo)數(shù)據(jù)。射頻識(shí)別系統(tǒng)主要包括兩部分,讀寫器和應(yīng)答器。
在單一讀寫器和多個(gè)應(yīng)答器存在的系統(tǒng)下,很容易出現(xiàn)多個(gè)應(yīng)答器同時(shí)響應(yīng)讀寫器的情況,這會(huì)影響讀寫器的正常工作,所以選擇適當(dāng)?shù)姆琅鲎菜惴▽?duì)于應(yīng)用RFID系統(tǒng)具有重大意義。
1 防碰撞經(jīng)典算法
1.1 隨機(jī)思想算法
1.1.1 幀時(shí)隙ALOHA(SFA)算法
時(shí)隙ALOHA算法[1]首先定義一個(gè)統(tǒng)一的幀長(zhǎng)度,這個(gè)幀由若干個(gè)時(shí)隙組成,時(shí)隙的長(zhǎng)度就是應(yīng)答器接收到讀寫器廣播信號(hào)后發(fā)送應(yīng)答的時(shí)間。
當(dāng)應(yīng)答器首次接受到讀寫器的廣播信號(hào)的時(shí)候,應(yīng)答器會(huì)隨機(jī)選擇一個(gè)時(shí)隙,當(dāng)?shù)綍r(shí)間到此時(shí)隙時(shí),應(yīng)答器返回應(yīng)答信息。此時(shí)的各個(gè)時(shí)隙內(nèi)存在的應(yīng)答器數(shù)量可分為3類,因此操作也分為3類。
(1)第1類是沒有應(yīng)答器,那么就直接到下一個(gè)時(shí)隙。
(2)第2類是有兩個(gè)或以上應(yīng)答器,此時(shí)多個(gè)應(yīng)答器發(fā)送應(yīng)答信號(hào),那么讀寫器就不能夠完成識(shí)別,因此也會(huì)繼續(xù)下一個(gè)時(shí)隙。
(3)第3類是有一個(gè)應(yīng)答器,此時(shí)讀寫器成功識(shí)別應(yīng)答信息,之后會(huì)發(fā)送選擇信號(hào),對(duì)此應(yīng)答器進(jìn)行讀寫,完成后會(huì)進(jìn)入下一個(gè)廣播周期。
只有之前選擇應(yīng)答器被操作完后,其他在讀寫器范圍內(nèi)的應(yīng)答器才能進(jìn)行一個(gè)新的尋呼過(guò)程。
1.1.2 動(dòng)態(tài)幀時(shí)隙ALOHA(DFSA)算法
動(dòng)態(tài)幀時(shí)隙ALOHA算法[1]是對(duì)幀時(shí)隙算法的改進(jìn),由于幀時(shí)隙算法的吞吐率不穩(wěn)定,只有在時(shí)隙數(shù)和應(yīng)答器數(shù)相等的情況下才能夠有比較良好的表現(xiàn),所以動(dòng)態(tài)幀時(shí)隙ALOHA算法針對(duì)這種情況進(jìn)行改進(jìn)。
當(dāng)每個(gè)時(shí)隙內(nèi)都存在兩個(gè)或者兩個(gè)以上的應(yīng)答器時(shí),讀寫器此幀內(nèi)沒有讀取到任何應(yīng)答信息,所以下一次會(huì)調(diào)整每幀內(nèi)時(shí)隙數(shù)量(1, 2, 8, …),即幀長(zhǎng)度,直到唯一的應(yīng)答器被識(shí)別。此種情況使得讀寫器產(chǎn)生幀的時(shí)隙數(shù)會(huì)隨著應(yīng)答器數(shù)量變化,因此使得效率一直保持比較好的狀態(tài)。
1.1.3 動(dòng)態(tài)隨機(jī)數(shù)算法
動(dòng)態(tài)隨機(jī)算法[2]的原理和動(dòng)態(tài)幀時(shí)隙ALOHA算法類似。每次的讀寫器尋呼都會(huì)發(fā)送一個(gè)Q值,每個(gè)應(yīng)答器會(huì)在1~2(q-1)范圍內(nèi)隨機(jī)選取一個(gè)計(jì)數(shù)。如果應(yīng)答器的計(jì)數(shù)為0,則返回應(yīng)答信息。讀寫器會(huì)對(duì)接收到的應(yīng)答信息進(jìn)行如圖1所示。
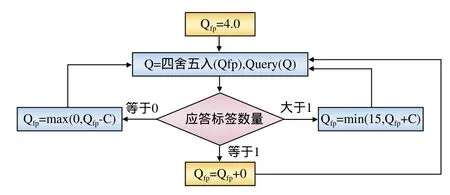
圖1 隨機(jī)數(shù)Q值變化示意圖
(1)如果有一個(gè)應(yīng)答,則發(fā)送命令領(lǐng)每個(gè)應(yīng)答器內(nèi)計(jì)數(shù)都做減1處理,然后進(jìn)入下一個(gè)接收周期。
(2)如果有多個(gè)應(yīng)答,則增加Q值,并且從新分配應(yīng)答器計(jì)數(shù),然后進(jìn)入下一個(gè)接收周期。
(3)如果沒有應(yīng)答,則減小Q值(保持大于0),并且從新分配應(yīng)答器計(jì)數(shù),然后進(jìn)入下一個(gè)接收周期。
1.2 基于二分搜索的確定算法
1.2.1 二分搜索算法
二分搜索算法(Binary Search)[1]的整個(gè)尋呼機(jī)制不同于上述的所有隨機(jī)方法。首先,二分搜索算法需要確定具體的碰撞的位置,如果用常規(guī)的0和1代替高低電平,即不歸零碼表示信號(hào),那么當(dāng)出現(xiàn)多個(gè)應(yīng)答器碰撞的時(shí)候,接收的信息也能夠讀出,但是此時(shí)接收到的信號(hào)是多個(gè)應(yīng)答器信號(hào)疊加結(jié)果,接收器接收到的信號(hào)是錯(cuò)誤的,如圖2所示。
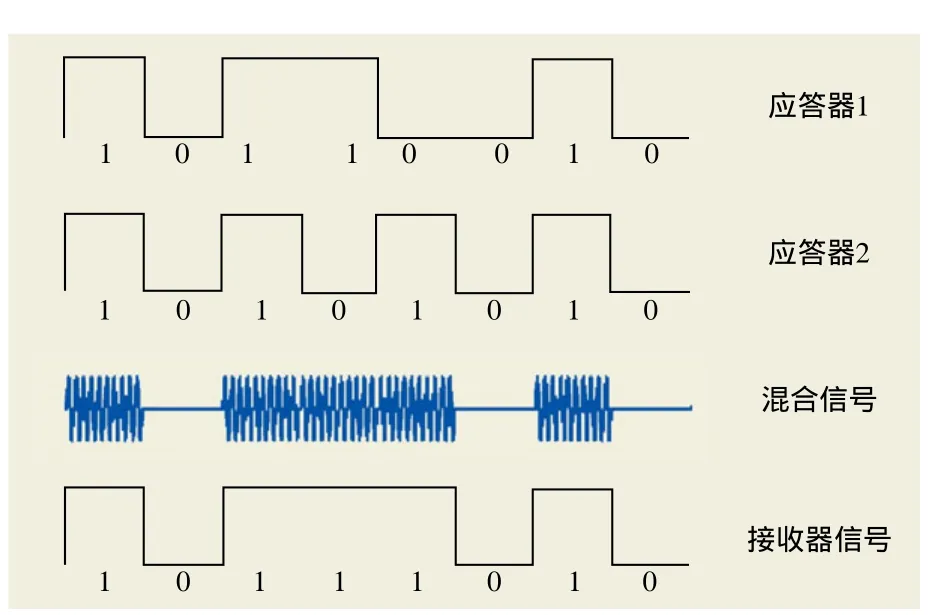
圖2 無(wú)基帶編碼導(dǎo)致接收錯(cuò)誤
對(duì)于此問(wèn)題的解決方法就是對(duì)信號(hào)進(jìn)行編碼,通常采用曼徹斯特碼。曼徹斯特碼的0和1表示如圖3所示。
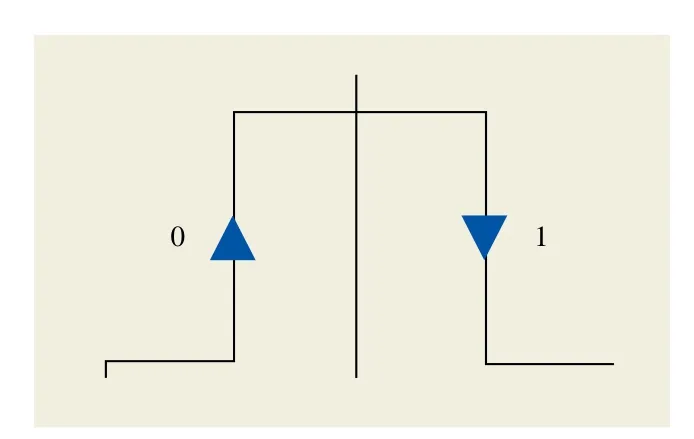
圖3 曼徹斯特碼
如果對(duì)于信號(hào)進(jìn)行曼徹斯特編碼,那么對(duì)于存在碰撞的情況就會(huì)很容易的檢測(cè)出來(lái),因?yàn)楫a(chǎn)生碰撞的地方會(huì)無(wú)法解碼,具體情況如圖4所示。
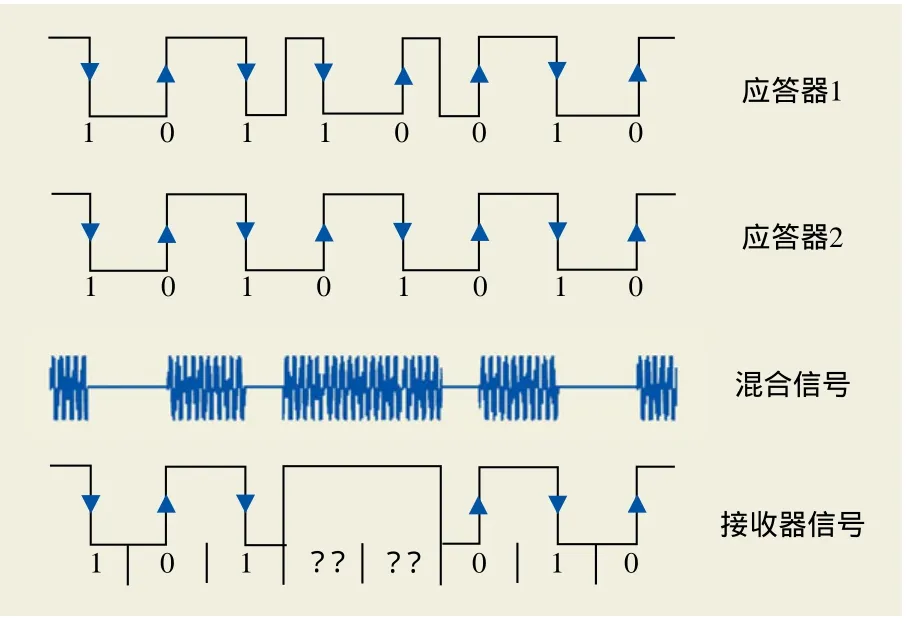
圖4 采用曼徹斯特碼檢測(cè)碰撞位
對(duì)于二分搜索算法實(shí)現(xiàn),首先應(yīng)答器都有唯一的二進(jìn)制序列作為自身的ID,之后讀寫器會(huì)用同樣長(zhǎng)度的發(fā)送序列以及如下指令配合進(jìn)行篩選:
(1)REQUEST指令:發(fā)送一個(gè)二進(jìn)制序列給應(yīng)答器,如果應(yīng)答器的數(shù)字序列小于讀寫器發(fā)送過(guò)來(lái)的序列,則應(yīng)答器把自己的序列返回給讀寫器。
(2)SELECT指令:發(fā)送一個(gè)通過(guò)算法決定的序列給應(yīng)答器,如果應(yīng)答器的序列與發(fā)送過(guò)來(lái)的序列相等,此應(yīng)答器被選中。
(3)READ指令:對(duì)選中的應(yīng)答器內(nèi)的數(shù)據(jù)進(jìn)行操作。
(4)UNSELECT指令:取消之前被選擇的應(yīng)答器的被選擇狀態(tài)和使應(yīng)答器滅活,此時(shí)應(yīng)答器不會(huì)響應(yīng)REQUEST指令。
每個(gè)周期,讀寫器首先發(fā)送REQUEST指令,一般發(fā)送同樣長(zhǎng)度的最大二進(jìn)制序列,即全1序列。此時(shí)所有的應(yīng)答器都會(huì)把自己的序列返回給讀寫器,根據(jù)譯碼,能夠檢測(cè)出碰撞位,根據(jù)最高碰撞位,改變下一次命令REQUEST發(fā)送的序列,改變規(guī)則是:首先,基序列是上一次的發(fā)送序列,把此序列的最高的碰撞位置定位為0,此序列的最高碰撞位之前的各位值和發(fā)生碰撞的應(yīng)答器ID對(duì)應(yīng)位保持一致,新的發(fā)送序列因此會(huì)變小,因此每次改變序列會(huì)減少選中的應(yīng)答器,直到選中一個(gè)應(yīng)答器完成一次識(shí)別。然后,識(shí)別出的應(yīng)答器會(huì)被SELECT,READ和UNSELECT操作,因此之后這個(gè)應(yīng)答器不會(huì)再響應(yīng)REQUEST命令。重復(fù)此流程直到所有的應(yīng)答器都被識(shí)別,整個(gè)流程如圖5所示。

圖5 二分搜索算法流程
1.2.2 動(dòng)態(tài)二分搜索算法
動(dòng)態(tài)二分搜索算法[1]是對(duì)上述的二分搜索算法的裁剪,區(qū)別在于讀寫器每次發(fā)送的REQUEST命令發(fā)送的二進(jìn)制序列和應(yīng)答器回復(fù)的二進(jìn)制序列。此算法中,每次REQUEST發(fā)送的二進(jìn)制序列是上一次碰撞最高位和其前面位的處理部分,而應(yīng)答器返回的是上一次碰撞最高位之后后面的部分,這樣能夠大量減少冗余序列的發(fā)送。
2 算法仿真分析
本文對(duì)于上述的兩個(gè)經(jīng)典算法,動(dòng)態(tài)幀時(shí)隙ALOHA和動(dòng)態(tài)二分搜索算法,進(jìn)行了MATLAB仿真,所得的結(jié)果主要是針對(duì)不同應(yīng)答器個(gè)數(shù)的情況下,讀寫器的尋呼次數(shù)比較。
對(duì)二分搜索算法在不同長(zhǎng)度序列下,同時(shí)識(shí)別1~100個(gè)應(yīng)答器的模擬仿真,比較序列長(zhǎng)度和尋呼次數(shù)是否存在關(guān)系,如圖6所示。圖中表明序列長(zhǎng)度和尋呼性能在此數(shù)量應(yīng)答器情況下無(wú)明顯關(guān)系,但是按照二分搜索算法原理可知道序列長(zhǎng)度決定了識(shí)別范圍。假設(shè)初始的序列長(zhǎng)度為L(zhǎng),那么二分搜索算法的防碰撞范圍是1-2(L-1)。
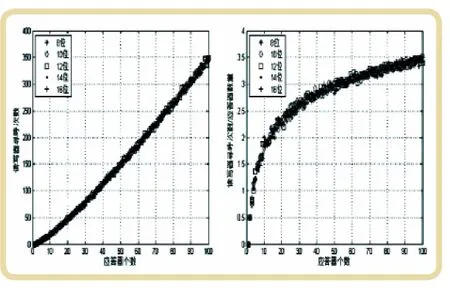
圖6 序列長(zhǎng)度和尋呼次數(shù)
之后對(duì)于動(dòng)態(tài)幀時(shí)隙ALOHA(DFSA)算法和動(dòng)態(tài)二叉樹搜索(DBS)算法進(jìn)行了仿真比較,如圖7所示。DFS算法初始幀時(shí)隙是24個(gè),之后指數(shù)4會(huì)根據(jù)碰撞結(jié)果增加或減小;DBS初始的序列長(zhǎng)度為8位。如圖7所示,在應(yīng)答器數(shù)目較少的情況下,DBS算法表現(xiàn)出了良好的搜索性能,隨著應(yīng)答器數(shù)量的增加,DFS的曲線追了上來(lái),到100之后已經(jīng)優(yōu)于了DBS算法。當(dāng)兩個(gè)算法的復(fù)雜度是不一樣的,由第二部分介紹原理時(shí)可以了解到,DBS的設(shè)計(jì)難度要高于DFS,因?yàn)镈BS實(shí)現(xiàn)中需要添加曼徹斯特碼的編碼解碼模塊,而DFS只需要分配隨機(jī)的時(shí)隙即可。因此在實(shí)際應(yīng)用中,DFS會(huì)比較容易實(shí)現(xiàn)。
3 結(jié)束語(yǔ)
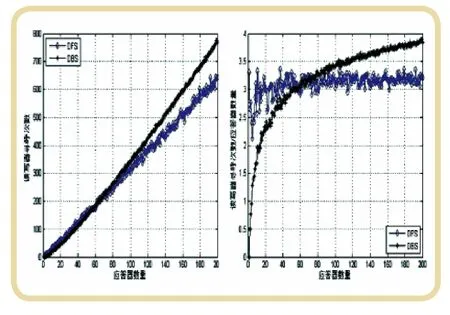
圖7 動(dòng)態(tài)幀時(shí)隙ALOHA算法和動(dòng)態(tài)二叉樹搜索算法進(jìn)行了仿真比較
本文介紹了RFID經(jīng)典的防碰撞算法,并對(duì)其中經(jīng)典的動(dòng)態(tài)幀時(shí)隙ALOHA算法和動(dòng)態(tài)二分搜索算法進(jìn)行了仿真分析,從尋呼次數(shù)的角度分析了兩者在性能上的優(yōu)缺點(diǎn)。可以看出,動(dòng)態(tài)幀時(shí)隙ALOHA算法實(shí)現(xiàn)簡(jiǎn)單,尋呼次數(shù)和應(yīng)答器個(gè)數(shù)存在穩(wěn)定的線性關(guān)系;動(dòng)態(tài)二分搜索算法需要編碼解碼幫助識(shí)別碰撞位。能夠在應(yīng)答器較少的情況下產(chǎn)生優(yōu)秀的識(shí)別性能,但是性能會(huì)隨著應(yīng)答器數(shù)量的增加而惡化。
除了經(jīng)典算法外,可以根據(jù)需要選擇改進(jìn)算法。對(duì)于隨機(jī)類算法,都是基于動(dòng)態(tài)幀時(shí)隙ALOHA算法的改進(jìn)算法,可以從分組[3],預(yù)估標(biāo)簽[4]等角度去改進(jìn);對(duì)于確定性的二分搜索算法可以通過(guò)編碼方式變化[5],記錄碰撞位[6]操作等減弱動(dòng)態(tài)二分搜索算法大量應(yīng)答器情況下的惡化效果。
在RFID應(yīng)用于各類產(chǎn)品的時(shí)候,防碰撞算法的選擇不可避免,針對(duì)應(yīng)用環(huán)境的不同,選擇適應(yīng)的防碰撞算法能夠更有效地完成識(shí)別。
[1]Klaus Finkenzeller . RFID HANDBOOK FUNDAMENTALS AND APPLICATIONS IN CONTACTLESS SMART CARDS,RADIO FREQUENCY IDENTIFICATION AND NEARFIELD COMMUNICATION (3nd Edition)[M], John Wiley& Sons Ltd, 2010.
[2]劉 佳,張有光.基于時(shí)隙的RFID防碰撞算法分析[J].通信與網(wǎng)絡(luò),2007(5):95-96.
[3]尹 君,何怡剛,李 兵,鄧 曉,譚陽(yáng)紅,肖迎群.基于分組動(dòng)態(tài)幀時(shí)隙的RFID防碰撞算法[J].計(jì)算機(jī)工程,2009,20(35):267-269.
[4]陳春明,馮玉田,付良成. RFID動(dòng)態(tài)幀時(shí)隙防沖突改進(jìn)算法研究[J].電子技術(shù)應(yīng)用,2013(1):86-89.
[5]李世煜,馮全源,魯 飛.基于BIBD(4,2,1)的防碰撞算法[J].計(jì)算機(jī)工程,2009,3(35):279-281.
[6]王 雪,錢志鴻,胡正超,李奕男.基于二叉樹的RFID防碰撞算法的研究[J].通信學(xué)報(bào),2010,6(31):49-57.
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評(píng)價(jià)·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國(guó)生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(hào)(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(hào)(2018年2期)2018-04-18 12:18:10
鐵道通信信號(hào)(2016年11期)2016-06-01 12:11:32
鑿巖機(jī)械氣動(dòng)工具(2016年3期)2016-03-01 04:00:25
中國(guó)病理生理雜志(2015年8期)2015-12-21 12:38:06