引領(lǐng)發(fā)展:防務(wù)展上的無人平臺
2014-11-22 01:57:33曾凱
兵器知識 2014年9期
關(guān)鍵詞:系統(tǒng)
曾凱
無人作戰(zhàn)平臺擁有效費比高、適應(yīng)性強、可執(zhí)行高風險任務(wù)等諸多優(yōu)勢,是未來裝備的發(fā)展重點。本屆展會繼續(xù)設(shè)立無人裝備技術(shù)專區(qū)集中展示無人裝備及其技術(shù),并且各國家及地區(qū)展館內(nèi)小型無人機、無人車隨處可見。除美國、英國、法國、德國、意大利、以色列等世界軍事強國外,西班牙等軍事技術(shù)欠發(fā)達國家也大量展示尺寸各異、功能完善的系列無人機及無人車。
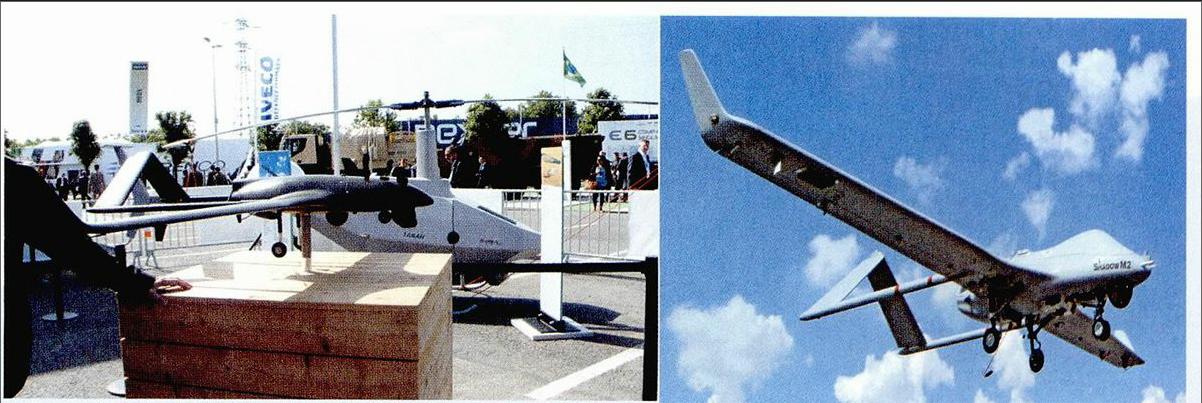
美國RQ-7B M2型“影子”無人機
RQ-7B M2型“影子”無人機是美國達信系統(tǒng)公司基于“影子”200無人機研制的下一代戰(zhàn)術(shù)無人機。目前,法國空客集團正在就即將來臨的空中無人系統(tǒng)需求與美國達信系統(tǒng)公司進行討論。法國陸軍對戰(zhàn)術(shù)無人機的需求問題上看中了空客集團與達信系統(tǒng)公司提供的M2型“影子”無人機方案。該無人機系統(tǒng)將裝配巴士集團研制的以“雪鶚”和Tanan無人機上的傳感器載荷為基礎(chǔ)傳感器載荷,以及“雪鸮”無人機上使用的通信鏈。法國多任務(wù)垂直起降無人機
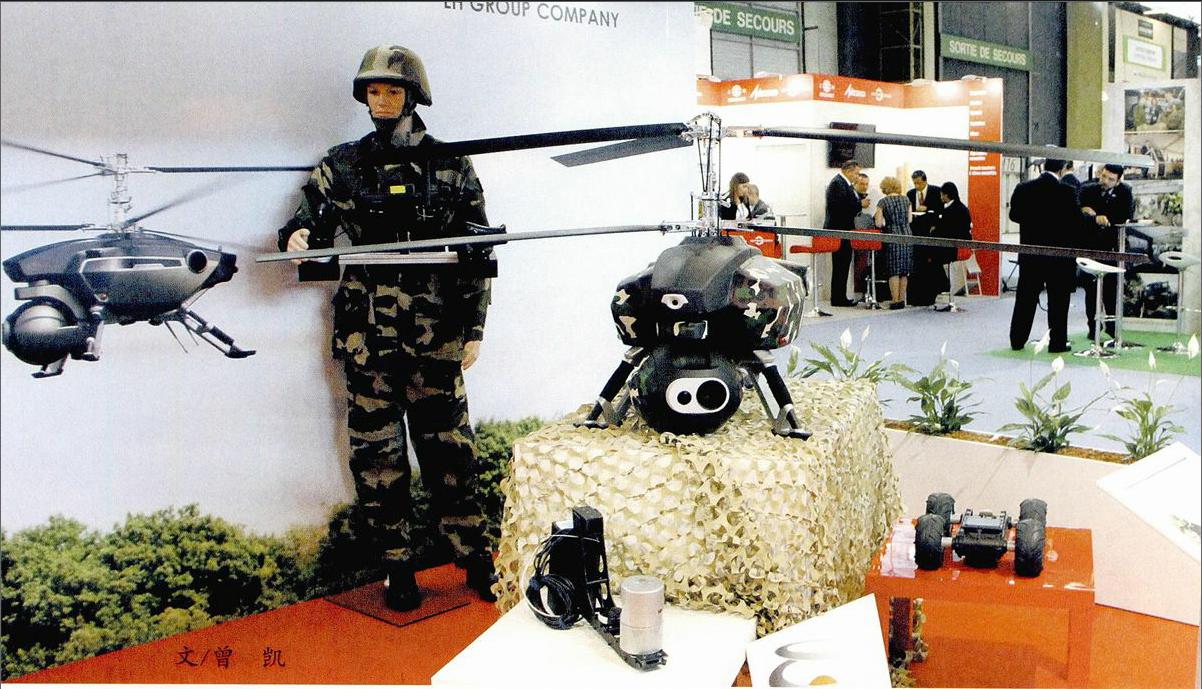
多任務(wù)垂直起降無人機是航空站(STATIONAIR)公司研制的一款小型垂直起降無人機,主要用于空中/激光雷達測繪和目標(化生放核)探測,尤其適用于空投緊急醫(yī)療補給和地面機器人。多任務(wù)垂直起降無人機安裝有2個反向轉(zhuǎn)子和1個渦扇發(fā)動機,飛行速度可達90千米/小時,采用胸部背帶式工作站,主要承擔導(dǎo)航工作站和觀察所的作用,增加了觸摸屏式平板電腦和操縱桿。該無人機實現(xiàn)了自主垂直起降,飛行模式包括手動和自主飛行兩種,主要通過自動駕駛儀航跡點以及利用鍵盤或操作桿以第一視角實現(xiàn)。導(dǎo)航功能是基于谷歌全球三維地圖實現(xiàn),信號傳輸頻率為2.4GHz-900MHz。
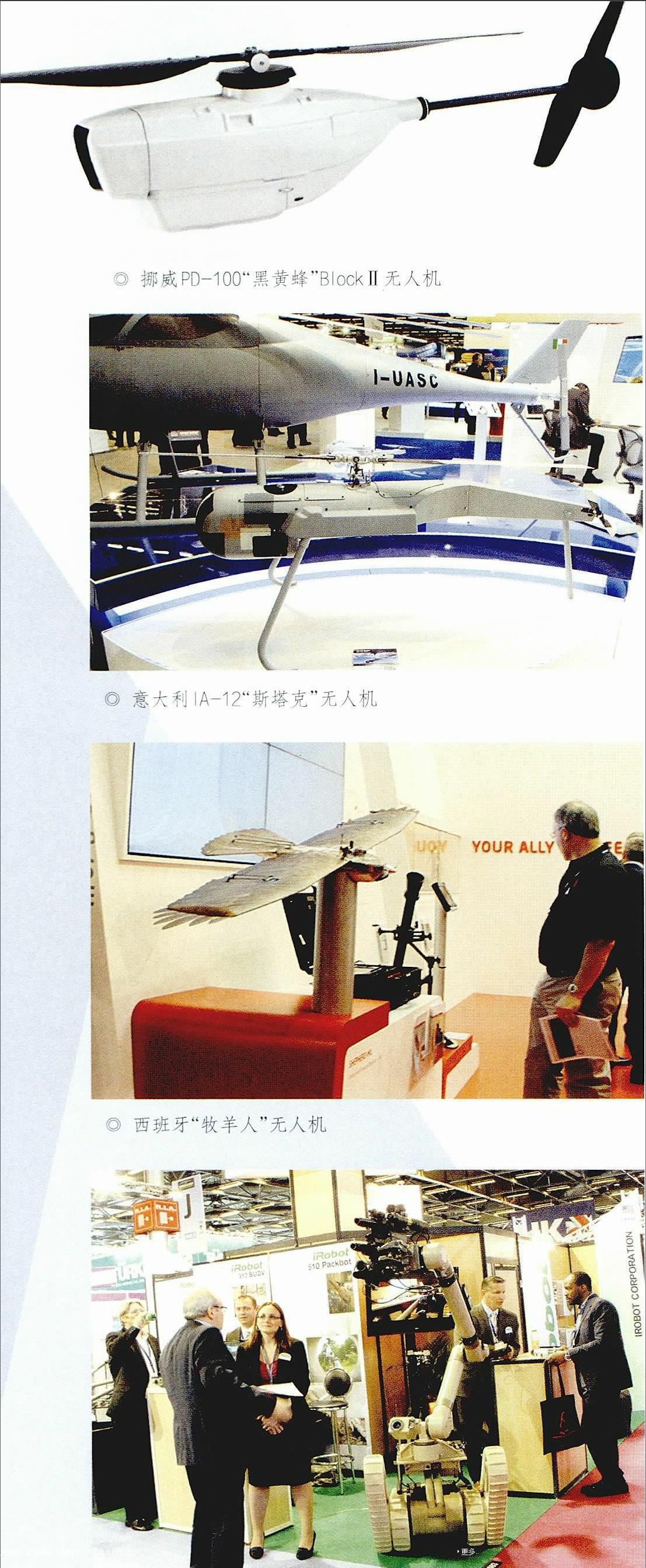
意大利IA-12“斯塔克”無人機
“斯塔克”(Stark)無人機是由意大利IDS系統(tǒng)公司在典型直升機概念基礎(chǔ)上研制的迷你型垂直起降無人機,采用主旋翼和尾部旋翼結(jié)構(gòu)用于補償自動旋轉(zhuǎn)運動,可用于執(zhí)行偵察、監(jiān)視、運輸、三維重建、空中測繪和事故調(diào)查等任務(wù)。該無人機可根據(jù)任務(wù)需求配置為偵察型、監(jiān)視型和運輸型無人機。“斯塔克”無人機外形結(jié)構(gòu)緊湊,可由單名操作人員攜帶和操作。動力裝置可選用汽油機或者電動機,用于驅(qū)動主旋翼和尾部旋翼。該無人機采用指揮與控制數(shù)據(jù)鏈通信,通信距離達到10千米,通過H.264新一代壓縮格式壓縮數(shù)據(jù)。地面控制站采用高清圖形用戶接口和觸摸屏人機接口,可輔助任務(wù)規(guī)劃,實時進行任務(wù)管理。西班牙“牧羊人”無人機
“牧羊人”(SHEP-HERD-MIL)軍用無人機由西班牙研制,集成到TECHFIRE火力支援信息系統(tǒng),為前線觀察提供支持。該無人機配裝攝像機和地理定位系統(tǒng),使其成為陸上和海上邊界防護和其它反毒行動所需的最佳武器裝備,可用于執(zhí)行控制和安全任務(wù)。“牧羊人”軍用無人機是類鳥自主偵察無人機,手持發(fā)射,可防水,配裝兩臺晝夜攝像機,能自動起飛和降落,還可根據(jù)航路點進行導(dǎo)航。該無人機通信數(shù)據(jù)鏈頻率為900MHz、1.4GHz、2.4GHz,可實時視頻傳輸,在失去控制信號時能自主返回基地和著陸。
挪威PD-100“黑黃蜂”BlOCk Ⅱ無人機
PD-100“黑黃蜂”BlockⅡ單兵偵察系統(tǒng)是挪威Prox動力航空系統(tǒng)公司研制的一款全球最小的掌上無人機,可以為用戶提供即時態(tài)勢感知。PD-100“黑黃蜂”BlockⅡ外形與早期Block I型相似,但Prox動力航空系統(tǒng)公司根據(jù)客戶反饋對其進行了改進,集成了自行研制的改進型納米無人機傳感器,使系統(tǒng)功能和飛行能力得到顯著提升。全套無人機系統(tǒng)重量僅為1.3千克,包括2架納米無人機、1個基站、1個控制器和1個屏幕。該無人機續(xù)航時間接近30分鐘,能夠為操作員提供實時全景視頻和高清快照圖像,此外還能執(zhí)行超視距使命任務(wù)。這套非常穩(wěn)定的無人機系統(tǒng)配備的自動駕駛儀可以實現(xiàn)復(fù)雜的飛行控制,且操作簡單,能顯著減少操作員工作負荷。該納米無人機隱秘的特性使其能夠部署在離目標很近的距離且不會被發(fā)現(xiàn)。
美國510“派克博特”化生放核爆炸探測機器人
510“派克博特”化生放核爆炸探測機器人由美國iRobot公司研制,是在510"派克博特”機器人基礎(chǔ)上發(fā)展而來,主要用于執(zhí)行化學、生物、放射性物質(zhì)、核物質(zhì)戰(zhàn)劑以及爆炸探測等任務(wù),目前還沒有列裝。510“派克博特”化生放核爆炸探測機器人結(jié)構(gòu)堅固耐用,能部署在極端環(huán)境中和其它機器人協(xié)作執(zhí)行任務(wù),為部隊提供更大的安全性。該機器人配備模塊化化生放核爆炸傳感器,能根據(jù)任務(wù)需求進行配置。該機器人提供多個攝像機圖像,在目標探詢和處理時提高了態(tài)勢感知能力。該機器人通信可靠性高,有兩種通信頻段可供選擇,視距內(nèi)無線電通信距離達到800米。該機器人操作控制單元是便攜式筆記本,通過標;隹操作手柄控制機器人各種功能。該機器人軟件接口允許機器人持續(xù)報告?zhèn)鞲衅鲾?shù)據(jù)。用戶可根據(jù)視頻數(shù)據(jù)、音頻告警以及在危險環(huán)境探測到的聲音進行操控。法國迷你型作戰(zhàn)工程機器人
迷你型作戰(zhàn)工程機器人(MINIROGEN)由法國ESDT機器人公司研制,又被稱為“眼鏡蛇”Mk2,主要設(shè)計用于幫助工程小組在執(zhí)行搜索簡易爆炸裝置任務(wù)時清除路邊炸彈。法國陸軍已經(jīng)裝備了迷你型作戰(zhàn)工程機器人,并將其部署到阿富汗使用。迷你型作戰(zhàn)工程機器人采用模塊化結(jié)構(gòu),能根據(jù)任務(wù)需求進行配置,可執(zhí)行偵察、簡易爆炸裝置處置、化學和輻射戰(zhàn)劑分析等任務(wù),其重量約6千克,可遠程遙控操作,能保護操作員在對可疑目標或潛在藏身之處進行檢查時免受攻擊,同時也能對例如車輛底部等不容易到達的地方進行檢查。
法國“天蝎座”微型戰(zhàn)術(shù)機器人
“天蝎座”(SCORPIO)微型戰(zhàn)術(shù)機器人是由法國泰克德勒(TECDRON)公司研制的小型輕型多用途遙控機器人,可在民事、軍事、工業(yè)和科學研究領(lǐng)域用于執(zhí)行偵察、監(jiān)視和檢查任務(wù)。該機器人是新研制的產(chǎn)品,在本屆展會上是首次展出,目前還沒有列裝。“天蝎座”微型戰(zhàn)術(shù)機器人可投擲部署,底盤由航空鋁制成,結(jié)構(gòu)堅固耐用,配裝可調(diào)晝夜視頻設(shè)備、二極管照明裝置、可記錄音頻的麥克風,可防水,且防水標準達到IP68。動力裝置采用可快速更換的鋰離子電池,電壓為12V,使得機器人可用于不平整地形、泥濘、砂礫和沙地等地形,還可選用外部電池和雙充電器。控制站是由5英寸LCD液晶顯示屏、操縱桿、功能按鈕組成。
法國“凱門鱷”機器人
“凱門鱷”(CAYMAN)機器人由法國泰克德勒公司研制,用于在民事、軍事、工業(yè)和科學研究領(lǐng)域執(zhí)行偵察、監(jiān)視、檢查和探測等任務(wù),在本屆展會上是首次展出,目前還沒有列裝。“凱門鱷”機器人是由航空鋁制成的靈巧遙控機器人,其結(jié)構(gòu)堅固耐用,對環(huán)境適應(yīng)性好,防水達到IP67標準。該機器人采用的四根鉸接履帶使其能夠通過沙地、泥土、泥濘、砂礫等各種地形,適于在沖突環(huán)境中執(zhí)行警戒、檢查任務(wù)以及提供輔助任務(wù)。每根履帶采用一臺電機驅(qū)動,單位功率較高。“凱門鱷”機器人易于操控,能裝備搭載36倍晝夜攝像機的陀螺儀穩(wěn)定轉(zhuǎn)塔,其控制站集成7英寸LCD屏幕、操縱桿、功能按鈕。該機器人可選裝搭載36倍晝夜攝像機的三軸視頻轉(zhuǎn)塔、溫度傳感器、激光測距機、外電器等。
法國“天蝎座”微型戰(zhàn)術(shù)機器人以色列“幽靈”無人機
“幽靈”(Ghost)是以色列宇航工業(yè)公司研制的一款微型旋翼無人機,專門用于支持特種部隊和連級步兵行動,適合在多建筑物、崎嶇地形。該無人機長1.45米,重4千克,有效載荷500克,采用雙旋翼結(jié)構(gòu),由電池驅(qū)動電動機提供動力,巡航時間為30分鐘,飛行速度最高達到64千米/小時。該無人機空氣動力裝置和雙旋翼推進系統(tǒng)有助于保持懸停模式下的高穩(wěn)定性,使其在強側(cè)風和狂風中也能保持懸停。雙旋翼直徑為0.75米,雖然很小,但可產(chǎn)生足夠升力,使其能安全抵近障礙物飛行,由窗戶飛進室內(nèi)或在建筑區(qū)內(nèi)懸停。雙旋翼由兩臺獨立但同步的電動機供電,供電量存在冗余,以防止其中某臺電動機出現(xiàn)故障。
研發(fā)人員希望該無人機能利用單臺電動機飛回安全地帶,能晝夜執(zhí)行任務(wù),較好的懸停能力使其可對感興趣區(qū)域靈活偵察。
編輯/王瑾endprint
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識經(jīng)濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32