磁懸浮軸承系統的時滯動力學建模與控制研究
2014-11-19 08:40:16鄭凱
航空發動機 2014年1期
關鍵詞:系統
鄭 凱
(中航工業沈陽發動機設計研究所,沈陽110015)
0 引言
磁懸浮軸承是利用可控磁場力提供無接觸支承而使轉子穩定懸浮于空間的1種高性能軸承,具有高轉速、無需潤滑、工作溫度范圍廣及可測可控性好等諸多優點[1],目前在空間技術、物理學、機械加工、振動控制、機器人、離心機、膨脹機等諸多工業領域中得到廣泛應用[2-4],且作為新一代多電航空發動機轉子的主要支承方式,引起世界各國研究機構和學者的高度關注[5-13]。磁懸浮軸承轉子系統在高速、超高速下運行時,會受到結構材料強度、動力時滯、錐型渦動、電壓電流鉗制等諸多因素的影響和限制,其中時滯的影響最不可忽略。機電控制系統中的時滯在數值上很小,一般只有幾十微秒,在系統相對簡單、時滯環節不多且對于系統動力行為無嚴格限制的情況下,忽略其產生的效應并沒有什么不妥。但對于工作在苛刻條件下的復雜機電系統,考慮到航空發動機等重要設備的高可靠性要求,其設計技術和控制理論研究必須構筑在更加嚴密的體系框架基礎上,必須認真考慮時滯的作用。特別對于在高速環境下運轉的磁懸浮軸承系統而言,即使是數字控制系統中的微小時滯,與轉子的轉動周期在數量級上也已經相當接近,因此有可能對轉子系統的穩定性和動態性能產生很大影響,必須加以細致研究。目前,對于磁懸浮軸承時滯問題的研究已經引起了一些關注[14-19],但大都僅限于簡單的單自由度系統的動力學問題,且在高速轉子系統控制的問題上卻很少考慮時滯的影響。
本文建立了時滯反饋下的5自由度磁懸浮軸承機電耦合的動力學模型,對時滯影響下的磁懸浮軸承系統的鎮定控制律進行研究。
1 系統時滯動力學建模
在實際中,磁懸浮軸承-轉子系統可以視作1個5自由度剛性轉子系統,如圖1所示。其徑向由2個徑向磁軸承支承,軸向由1個推力軸承支承。
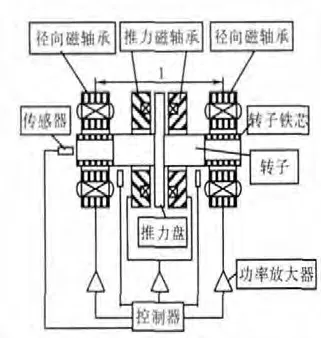
圖1 5自由度磁軸承-轉子系統
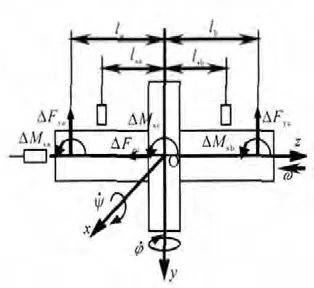
圖2 轉子受力情況
轉子受軸承電磁力情況如圖2所示。轉子徑向2支點a、b 之間的跨度為l,轉子質心O 距左右支點的距離分別為la、lb。設轉子在2個支點處的廣義坐標qB=[xayaxbybzc]T,則轉子系統的運動微分方程可寫作[20]

其中

式中:m 為轉子質量;Jox、Joy為轉子的赤道轉動慣量;Joz為轉子的極轉動慣量;Joxz、Joyz為轉子的轉動慣量積;ω 為轉子的角速度;f 為不平衡擾動項;Qo為磁懸浮軸承所提供的動態力和力矩。
將上式線性化可得

式中:IB為控制電流;KB和KIB的數學表達在文獻[1]中給出,在此不作贅述。
上述運動方程都是不封閉的,電流IB需要由反饋控制系統提供。反饋控制系統主要由傳感器、控制器和功率放大器等組成,由傳感器檢測獲得轉子的位移信息后送入控制器,在控制器中經過控制運算得到控制信號后送入功率放大器,功率放大器根據控制信號產生相應的控制電流電磁鐵形成電磁力,使轉子保持在平衡位置。反饋控制系統的傳遞函數如圖3所示。
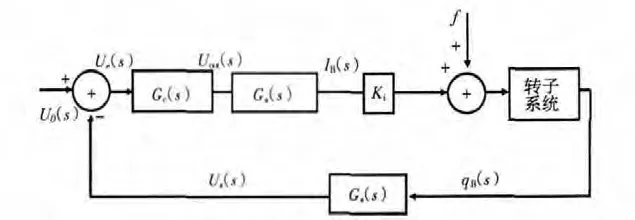
圖3 磁軸承-轉子系統的控制傳遞函數
在圖3中,Gs(S)為傳感器傳遞函數,可視作1階環節

式中:As為傳感器的增益系數;Ts為傳感器的衰減時間常數。Gc(s)為控制器傳遞函數,以PD控制器為例,則有

式中:kp,kd分別為控制器的比例系數和微分系數。
功放環節的傳遞函數Gc(s)也可視作1階環節

式中:αa為功率放大器的增益系數;Ta為功率放大器電路的衰減時間常數。
以往對于磁懸浮軸承轉子系統的研究,大多在同一時間的參考系下展開,而實際上反饋回路中各環節的工作,如傳感器中位移信號采集、處理與轉換以及控制器中控制算法的運算等,都不可避免要消耗一定的時間;此外,執行單元中功率放大器的飽和效應和電磁鐵線圈中的渦流損耗和磁滯特性,也可能造成一定的遲滯效應[14]。將控制系統各部分的時滯考慮在內,則系統的傳遞函數如圖4所示。在圖4中所加入時滯的來源見表1。
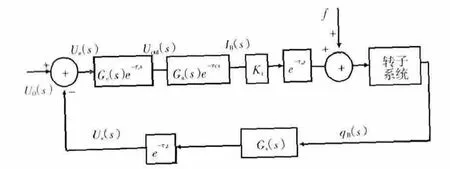
圖4 計入時滯后的磁懸浮軸承-轉子系統的控制傳遞函數
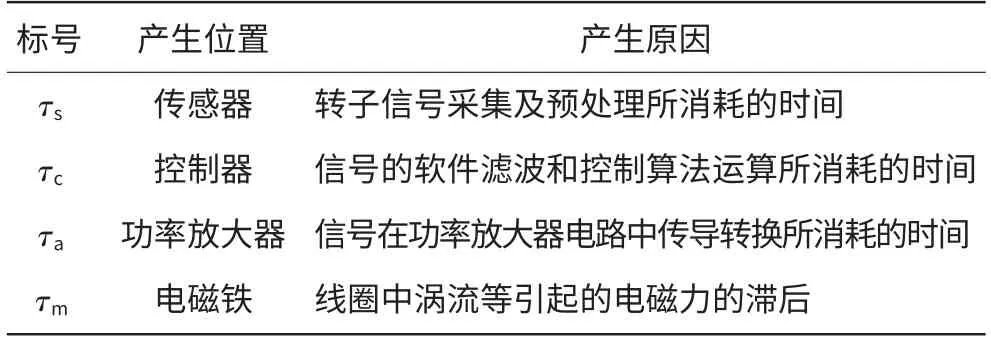
表1 各部分時滯的來源
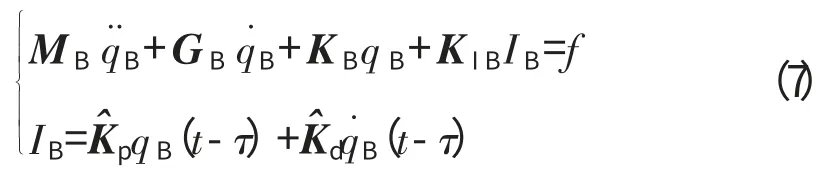
取控制的參考輸入為U0=0,將式(3)~(5)分別寫成微分方程形式,與式(2)聯立可以得到考慮時滯反饋磁懸浮軸承系統的機電耦合微分方程組
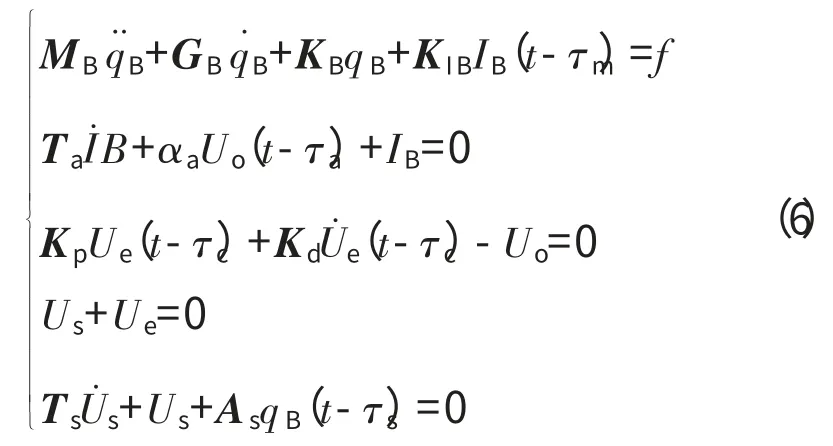
式中:Kp,Kd為控制器增益矩陣。
Kp,Kd可根據需要設計。若選用式(4)中PD控制器,則Kp,Kd皆為對角陣,可表示為
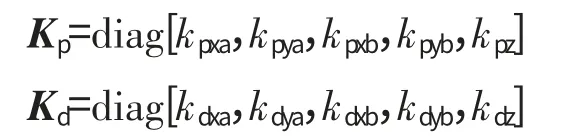
矩陣中的系數為對應自由度上的比例和微分系數。下面將給出考慮反饋時滯后控制增益陣的確定方法。
2 鎮定控制器設計
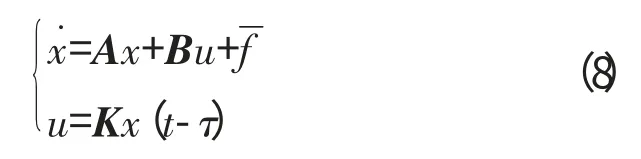
對于磁懸浮軸承轉子系統,假定其傳感器和功率放大器均工作在線性區域,取Ta=0,Ts=0,τ=τa+τc+τs+τm,則式(6)可簡化為
寫成狀態方程為
磁懸浮軸承系統屬于高速動態系統,反饋回路中的各時滯項都是隨時間變化的,因此,本文將時滯τ用有界時變函數表示為

τ0和σ 都為常數,可通過對反饋回路中時滯進行測算來確定,則有τ(t)∈[τ0-σ,τ0+σ]。對于系統方程式(8),采用Lyapunov直接法可以推導出以下命題。
假設τ0,σ 和μ 為給定正參量,且滿足τ0>σ,μ>0,如果存在矩陣使得下列線性矩陣不等式成立
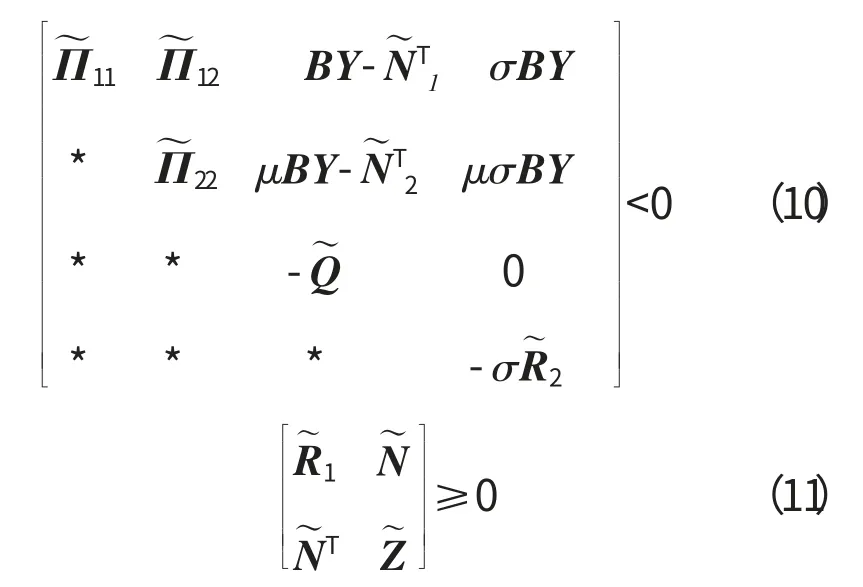
系統在反饋時滯滿足τ(t)∈[τ0-σ,τ0+σ]的情況下可由控制輸入u=Kx(t-τ)鎮定,控制增益為

假定存在矩陣Q>0,R1>0,R2>0,N=[N1N2],P=
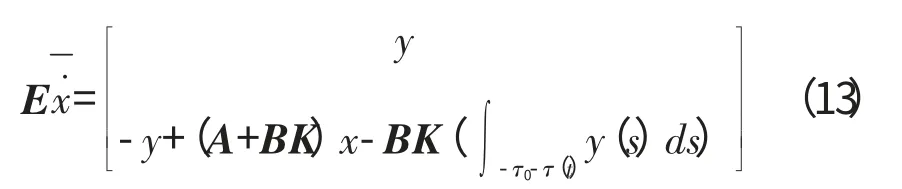
將式(8)寫作描述子系統
構造Lypunov函數
對V(t)求導,并利用以下2個不等式[21-22]放大。
(1) 對 于 任 意a∈?n,b∈?2n,N∈?2n×n,R∈?n×n,Y∈?n×2n,Z∈?2n×2n,則有

其中

(2)對于任意向量a,b 和正定對稱矩陣Λ,則有

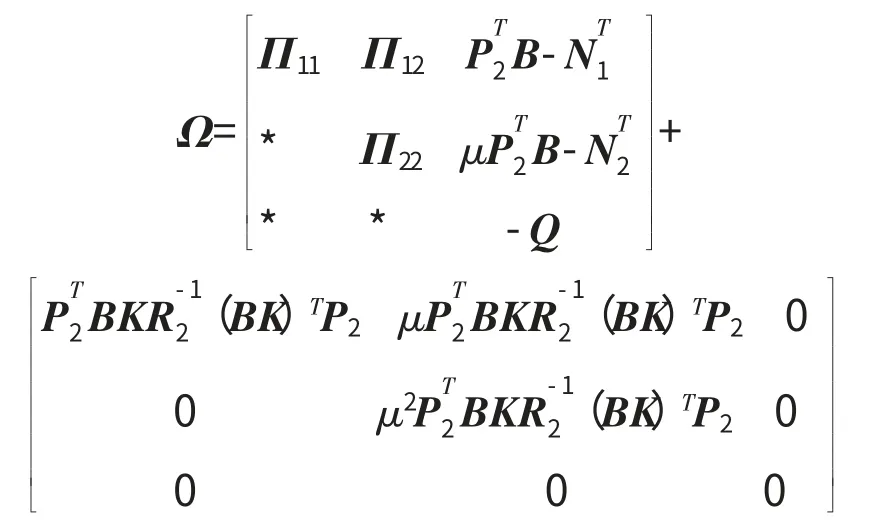
得到不等式

其中ξT=[xT(t),yT(t),xT(t-τ0)]
由Lyapunov定律可知,系統漸進穩定的充分條件為

對式(19)應用Schur補性質[17]進行矩陣變換后,令左乘和右乘diag{X X X X},并引入變量變換則可以得到式(10)。同樣對式(16)采取相似變換可以得到式(11)。前文命題得證。
定理將系統鎮定控制問題轉化為線性矩陣不等式問題,利用內點法[21]求解式(11)和(12),可以確定時滯相關的狀態反饋控制器的增益陣K。
3 仿真分析
選取一實際的磁懸浮軸承剛性轉子系統為對象,其參數值見表2、3。
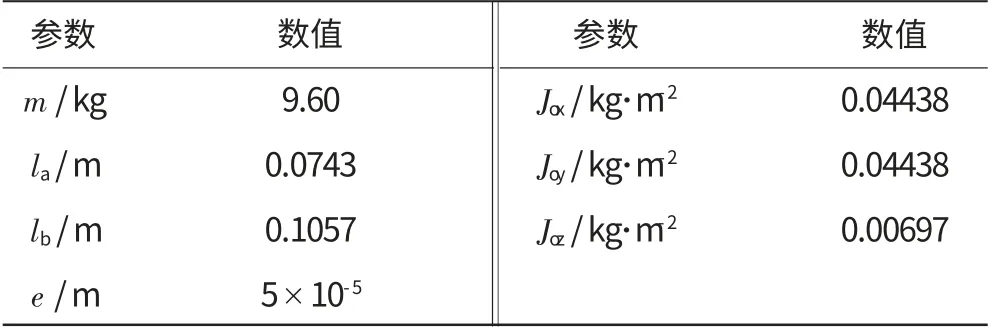
表2 磁懸浮軸承轉子系統參數(轉子部分)
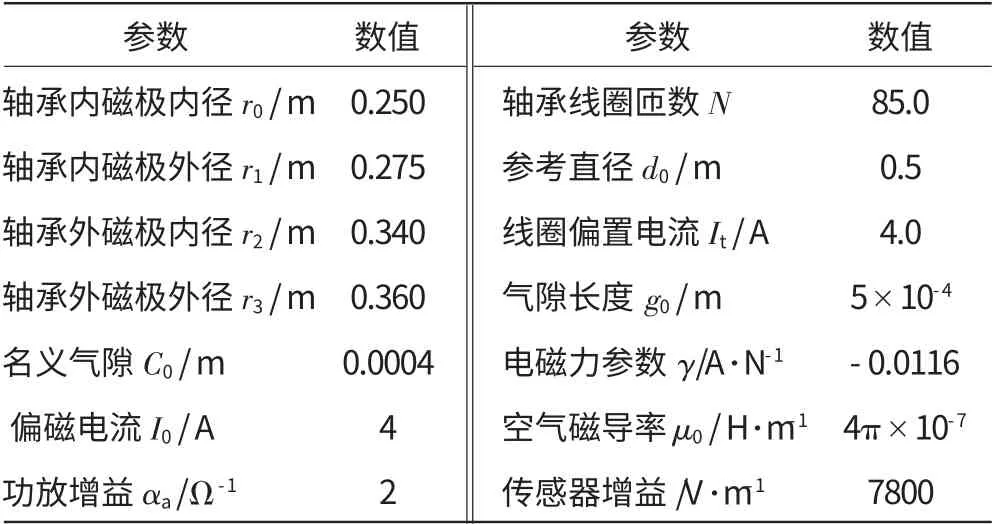
表3 磁懸浮軸承轉子系統參數(軸承部分)
3.1 時滯對系統的影響
首先選用式(3)未考慮時滯的PD控制器進行仿真,在xa、ya、xb、yb自由度上分別采用獨立的PD控制,其控制參數為

設轉子工作轉速為20000r/min,為研究時滯對系統的影響,對式(6)在以下2種情況下進行仿真計算。

加入時滯前后轉子a側與軸向的振動情況分別如圖5、6所示。
從圖5、6中可見,PD控制器在假定系統不存在時滯的情況下時可以保持轉子系統穩定,且控制性能尚可;但在反饋回路中計入總計60μs時滯后,系統出現劇烈振蕩,并最終失穩。這表明在控制反饋回路中即使存在微秒級的微小時滯,但已經對高速轉子系統的動態特性和穩定性產生重大影響,使得動態性能變差,甚至出現失穩。

圖5 無時滯,PD控制器仿真結果
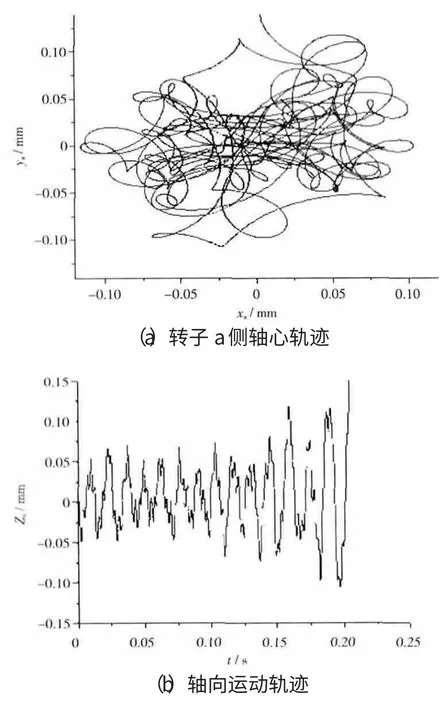
圖6 計入時滯后,PD控制器仿真結果
3.2 鎮定控制算法驗證
將表1、2中的參數代入狀態方程式(8),依據定理,取μ=0.1,可以求得滿足式(10)和(11)的控制增益

其中
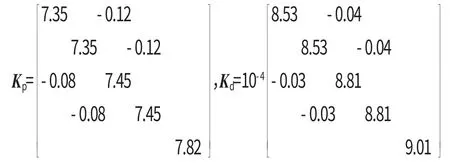
將Kp、Kd代入式(9)后,與3.1節中對PD控制器的仿真研究相同,依然在假定系統無時滯和計入時滯2種情況下進行仿真運算,計入時滯前后轉子的振動情況如圖7、8所示。
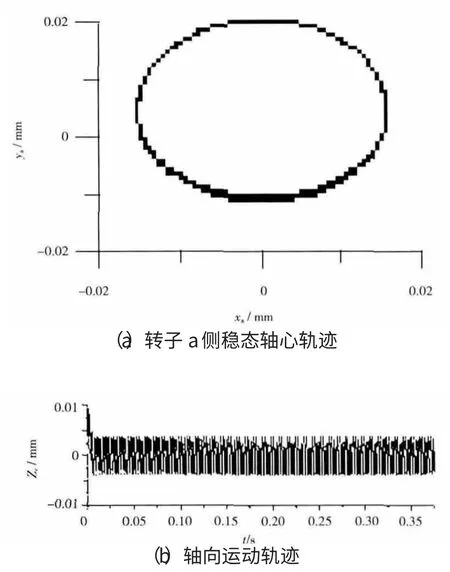
圖7 無時滯,本文設計的控制器仿真結果
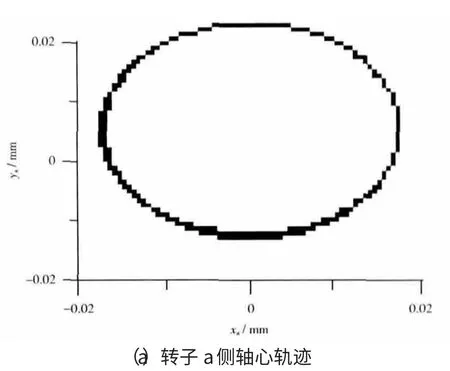
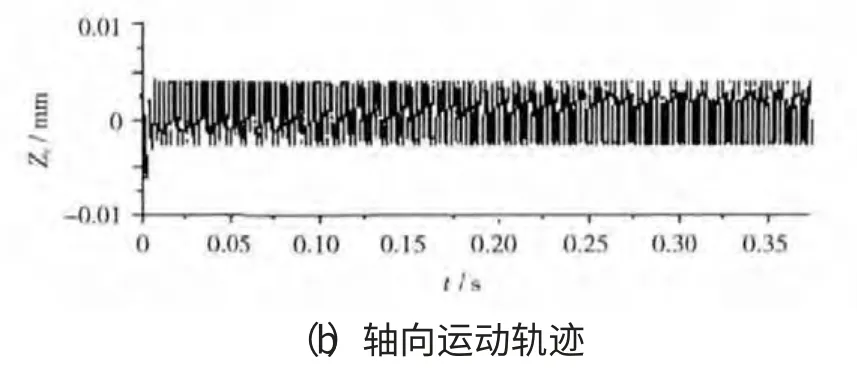
圖8 計入時滯后,本文設計的控制器仿真結果
經過鎮定算法可以看出轉子系統在計入反饋時滯后,沒有出現類似PD控制器一樣失穩的狀況,動態性能并未發生明顯變化,依然可以穩定運行,控制算法的有效性得到驗證。
4 結論
(1)由于在機電系統中微秒級的時滯已經可以影響到高速轉子系統的動力學特性。因此在該系統動力學和控制研究時,應該考慮時滯效果。
(2)通過適當的控制方法,可以有效地抑制時滯對系統的負面效果,保證轉子系統穩定運行。
(3)對高速轉子系統穩定性的理論方法和數值計算方法的研究除時滯外,應將其他多種非線性因素(如不平衡擾動,電磁線圈的渦流影響)等考慮在內,研究多種因素對于轉子系統動態特性的綜合影響。
(4)研究能夠較為精確的測量實際機電系統中時滯的方法,為系統穩定性和控制設計提供有力的支撐和依據。
(5)對時滯控制理論研究,需要進一步降低控制器設計中的保守性,并提高控制器對于模型不確定性和擾動的魯棒性。
[1]虞烈.可控磁懸浮轉子系統[M].北京:科學出版社,2003:2-3.YU Lie.Controlled magnetic levitation system [M].Beijing:Science Press,2003:2-3.(in Chinese)
[2]Schweitzer G,Bleuler H,Traxler A,et al.Active magnetic bearings:theory,design,and application to rotating machinery[M].Heidelberg:Springer-Verlag,2009:2-10.
[3]Dussaux M.The industrial applications of the active magnetic bearing technology [C]//Proceeding of 1st International Symposium on Magnetic Bearings.Tokyo Japan:NISSEI Eblo,1990:33-38.
[4]Brunet M.Practical applications of the active magnetic bearings to the industrial world [C]//Proceeding of 3rd International Symposium on Magnetic Bearings.ETH Zurich:Springer,1988:225-244.
[5]汪希平,謝建華,朱禮進.電磁軸承在航空發動機應用中的設計問題分析[J].航空發動機,2002(1):4-8.WANG Xiping,XIE Jianhua,ZHU Lijin.Analysis in design problems of AMB applied in aircraft engines[J].Aeroengine,2002(1):4-8.(in Chinese)
[6]常春江,楊榮.電磁軸承及其應用(第一部):分電磁軸承的發展及其應用前景[[J].航空發動機,2003,29(1):46-49.CHANG Chunjiang,YANG Rong.Application of AMB,Part I:development and prospects of active magnetic bearing in aeroengine[J].Aeroengine,2003,29(1):46-49.(in Chinese)
[7]常春江,楊榮.電磁軸承及其應用(第二部分):電磁軸承工作原理和設計要點[J].航空發動機,2003,29(2):44-50.CHANG Chunjiang,YANG Rong.Application of AMB,PartⅡ:fundamentals and design of active magnetic bearing in aeroengine[J].Aeroengine.2003,29(2):44-50.(in Chinese)
[8]楊榮,常春江,龔學耕.電磁軸承系統的試驗研究[J].航空發動機,2001(4):15-19.YANG Rong, CHANG Chunjiang, GONG Xuegeng.Experimental and design of active magnetic bearing in aeroengine[J].Aeroengine,2001(4):15-19.(in Chinese)
[9]張鋼,汪希平.實驗用航空發動機磁懸浮軸承樣機的穩定性分析[J].航空發動機,2002(2):1-5.ZHANG Gang,WANG Xiping.Stability analysis of experimental AMB prototype for aircraft engine [J].Aeroengine,2002(2):1-5.(in Chinese)
[10]XU L,WANG L,Schweitzer G.Development of magnetic bearings for high temperature suspension[C]//Proceeding of 3rd International Symposium on Magnetic Bearings.ETH Zurich:Taylor&Francis Group,2000:117-122.
[11]Mekhiche M,Nichols S,Oleksy J,et al.50 KRPM,1100°F Magnetic Bearings for Jet Turbine Engines[C]//Proceeding of 3rd International Symposium on Magnetic Bearings.ETH Zurich:Taylor&Francis Group,2000:123-128.
[12]Kelleher W P,Kondoleon A S.A magnetic bearing suspension system for high temperature gas turbine applications[C]//Industrial Conference and Exhibition on Magnetic Bearings.Virginia:Technomic Pub.Co,1997:15-24.
[13]Storace AF.Integration of magnetic bearings in the design of advanced gas turbine engines[J].Journal of Engineering for Gas Turbines and Power,1995,117:655-665.
[14]Inoue T,Ishida Y.Nonlinear forced oscillation in a magnetically levitated system:the effect of the time delay of the electro-magnetic force[J].Nonlinear Dynamics,2008,52(Compendex):103-113.
[15]JIANG W,WANG H,WEI J.A study of singularities for magnetic bearing systems with time delays[J].Chaos,Solitons and Fractals,2008,36(Compendex):715-719.
[16]WANG H,LIU J.Stability and bifurcation analysis in a magnetic bearing system with time delays[J].Chaos,Solitons and Fractals,2005,26(Compendex):813-825.
[17]Wang H,Jiang W.Multiple stabilities analysis in a magnetic bearing system with time delays[J].Chaos,Solitons and Fractals,2006,27(Compendex):789-799.
[18]JI J C.Stability and hop bifurcation of a magnetic bearing system with time delays[J].Journal of Sound and Vibration,2003,259(4):845-856.
[19]JI J C.Dynamics of a Jeffcott rotor-magnetic bearing system with time delays[J].International Journal of NonLinear Mechanics,2003,38(9):1387-1401.
[20]張鋼,李松生,張建生,等.磁懸浮軸承-轉子系統的機電耦合動力學模型[J].機械科學與技術,2003(增刊1):46-49.ZHANG Gang,LI Songsheng,ZHANG Jiansheng,et al.Coupled electrome-chanical dynamic model of rotor-magnetic bearings system [J].Mechanical Science and Technology for Aerospace Engineering,2003(S1):46-49.(in Chinese)
[21]Moon Y S,Park P,Kwon W H,et al.Delay-dependent robust stabilization of uncertain state-delayed systems [J].International Journal of Control,2001,74(14):1447-1455.
[22]CAO Y Y,SUN Y X,Lam J.Delay-dependent robust H∞control for uncertain systems with time-varying delays[J].IEE Proceedings:Control Theory and Applications,1998,145(3):338-344.
[23]Boyd S,Ghaoui L E,Feron E,et al.Linear matrix inequalities in system and control theory[M].Society for Industrial and Applied Mathematics,1994:115-130.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32