虛擬信號檢測仿真中的探頭組建模研究
2014-11-15 02:08:38李彥廣劉愛軍
電子測試 2014年5期
李彥廣,劉愛軍
(商洛學院計算機科學系,商洛,726000)
0 引言
運用“軟件化”的虛擬檢測工具進行信號檢測是虛擬維修樣機故障檢修三維視景仿真的重要內容,探頭組作為虛擬檢測工具獲取檢測點信號的關鍵部件,是剛性部件和柔性線纜的組合體。由于探頭組組成要素的特性和建模方法差異較大,在探頭組運動過程中,既要使整體產生自然的彎曲變形,又要確保各組成要素不發生脫節,保持探頭組的完整性,必須對探頭組進行運動控制,增強信號檢測過程仿真的真實感。為此,本文依托Virtools虛擬仿真平臺,采用基于離散控制點的柔性線纜建模方法,構建探頭組模型,并編輯運動控制算法和程序,確保探頭組在信號檢測仿真中進行逼真的運動。
1 探頭組結構模型
探頭組由固定接頭、柔性線纜和探頭三部分組成,如圖1所示,固定接頭在固定坐標上與虛擬檢測工具主體緊密相連,不可移動。探頭由探頭主體和探點組成,探點與檢測點的碰撞是觸發顯示信號波形的信息來源。柔性線纜是固定接頭和探頭的聯接體,具備自然彎曲、扭曲、變形等柔性特質,其空間位置和姿態由離散控制點決定,同時需要為其設置截面半徑、表面材質、總長度、重量和彈性等基本物理屬性。
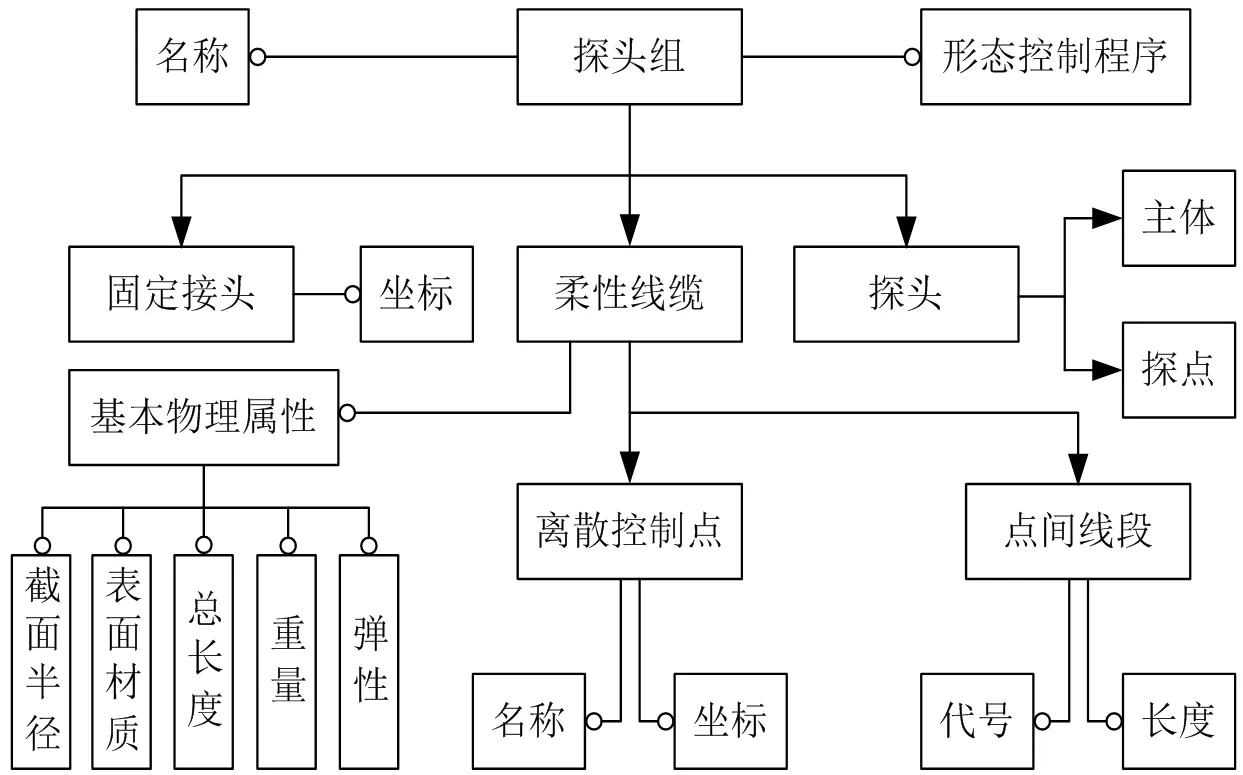
圖1 探頭組結構模型
2 基于Virtools的探頭組建模方法
虛擬檢測工具探頭組的固定接頭和探頭屬于剛性部件,運用3DMAX建立三維模型后導入Virtools平臺可完成建模。通過3DMAX建立的導線三維模型導入VT平臺后生成的是剛性物體,在長度和粗細固定時,無法體現自然扭曲、彎曲等柔性特質,因此,只能在VT平臺下直接建立導線模型,通過繪制Curve曲線,添加一定數量的離散控制點,并運用行為模塊設置運動控制規則,使導線具備完整的柔性特質。建模步驟為:
1)利用3D Layout區Creation Tools的Create Curve按鈕繪制曲線,通過調整離散控制點設置曲線初始位置和總長度。
2)在Curve Setup中設置曲線的平滑開放屬性,調整離散控制點的個數,并記錄相鄰控制點間的長度。
3)在Level Manager中創建離散控制點組,將曲線上的所有控制點發送至該組。
4)創建曲線仿真腳本,應用物理化模塊Physicalize BB使導線具備相應的物理學屬性。
5)通 過 Move To、Object Slider、Keep At Constant Distance等模塊,設置探頭組的運動控制程序。
3 探頭組運動控制
3.1 運動控制算法
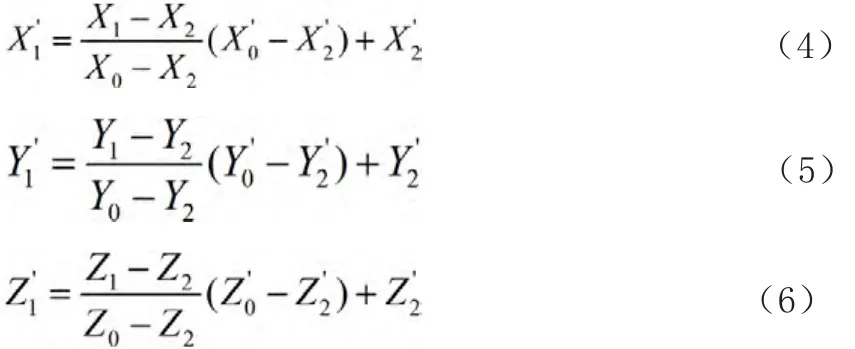
運用密集的離散控制點將長度為L的導線分為N等份,控制點數i=N+1,當N值取足夠大時,可使得三個相鄰的控制點近似處于同一直線上(可根據實際導線對折后彎曲部位的長度設定每等份的長度,依此確定控制點數),導線末端控制點Curve-Point000N與固定接頭相連,坐標為PN(XN,YN,ZN),在已知所有控制點的初始位置Pi(Xi,Yi,Zi)和第一控制點運動1幀后所處當前位置坐標P′0 (X′0,Y′0,Z′0)的前提下,求解所有控制點的當前位置坐標P′i (X′i,Y′i,Z′i)。
以前三個控制點為例,由于三個控制點所處的導線段近似于直線段,在XOY平面和XOZ平面上的投影也為一條直線段(假設不出現投影為點的情況),如圖2所示,導線段運動前后在同一平面上的投影線段相似,根據相似原理可得:
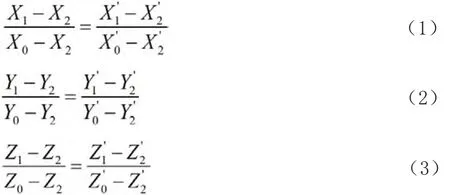
由上式得:
由于采用Keep At Constant Distance模塊使相鄰控制點間的長度保持L/N不變,且三點間的線段為直線段,則根據三維
坐標系中點間長度計算公式可得:

由(4)~(9)式可求得P′1(X′1,Y′1,Z′1)和P′2(X′2,Y′2,Z′2),依此方法可算出所有控制點的當前位置坐標。
3.2 運動控制過程
信號檢測過程中,線纜末端控制點跟隨探頭移動,并通過距離約束牽引前一控制點發生位移,通過逐點的牽引使探頭組發生自然的變形。同時,探頭組始末兩端一般分置于機柜內外,為避免導線與裝備模型發生穿透現象,需要在導線和裝備模型間建立碰撞檢測。導線的空間位置和姿態由控制點決定,其碰撞檢測通過離散控制點實現,通過Object Slider模塊實現碰撞滑動,當離散控制點與裝備模型的距離小于某預設值(發生碰撞)時,離散控制點做出沿著裝備模型表面滑動的反應,改變位置坐標,因此距離保持和碰撞檢測共同決定離散控制點在運動中的位置坐標變化。
探頭組運動過程如圖3所示,設導線共有n個離散控制點,其中,首端控制點1與固定接頭連接,保持位置坐標不變,其它控制點的位置坐標可變,控制點間長度為l(n-1)n。探頭組運動控制過程如圖4.4所示,探頭沿路徑每移動1幀(約30ms),與裝備模型進行碰撞檢測,若發生碰撞滑動響應,探頭坐標做出調整,導線末端控制點n移動到探頭位置,若不發生碰撞,控制點n直接移動到探頭位置,與探頭保持相對位置不變;控制點n發生位移時也需進行碰撞檢測,根據檢測結果調整位置坐標,控制點n-1在長度l(n-1)n的約束下,受控制點n的“牽引”而發生位置變化,而控制點2即要受控制點3的“牽引”,又要與固定端控制點1保持固定長度l12。通過后一控制點對前一控制點的“牽引”方式,使導線整體發生形態變化。
3.3 運動控制仿真
當探頭發生旋轉、移動行為時,導線應根據探頭的位置變化進行相應的運動控制,以保持探頭組的完整性。在Virtools虛擬仿真平臺中,設置探頭與導線連接點為探頭的坐標中心,當探頭運動一幀時,運用Move To模塊使導線末端點Curve_piont05移動到探頭坐標中心,與探頭保持相對位置不變,同時,參照探頭導線的控制點間長度,通過Keep At Constant Distance模塊使控制點從后往前依次發生牽引運動,使導線整體發生自然的柔性變形。運動控制仿真程序腳本如圖4所示。
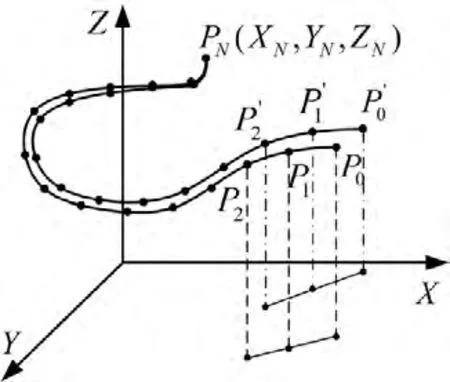
圖2 探頭組導線運動分析
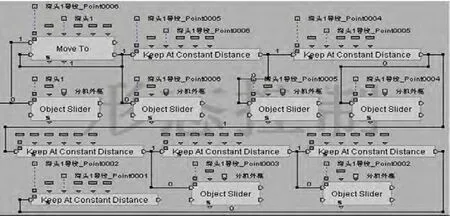
圖4 探頭組運動控制仿真程序腳本
4 結語
探頭組是信號檢測仿真中獲取虛擬裝備輸出信號的關鍵部件,建立真實感強的探頭組模型,對于確保信號檢測仿真過程的真實感具有重要作用。本文依托Virtools平臺,構建探頭組結構模型,提出探頭組運動控制算法,設計了運動控制過程,并基于此編寫仿真程序腳本,使探頭組模型具備柔性特質,并通過信號檢測過程仿真實例驗證了建模方法的可行性。
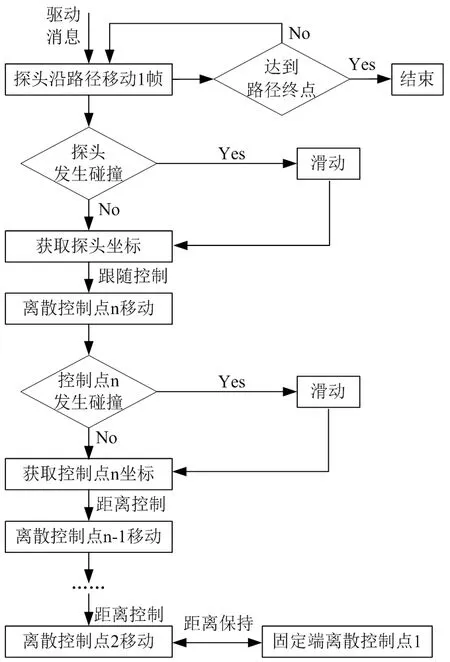
圖3 碰撞檢測條件下探頭組運動控制
[1]劉檢華,萬畢樂,寧汝新.虛擬環境下基于離散控制點的線纜裝配規劃技術[J].機械工程學報,2006,42(8):125-130.
[2]萬畢樂,寧汝新,劉檢華,熊珍琦.虛擬環境下的線纜裝配建模技術研究[J].系統仿真學報,2006,18(1):267-274.
[3]魏發遠,王峰軍,陳新發.含有柔性電纜的復雜系統裝配仿真[J].工程設計學報,2007,14(1):25-30.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
鴨綠江(2021年35期)2021-04-19 12:24:18
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
數學物理學報(2020年2期)2020-06-02 11:29:24
中國生殖健康(2019年3期)2019-02-01 06:12:26
光學精密工程(2016年6期)2016-11-07 09:07:19
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
核科學與工程(2015年4期)2015-09-26 11:59:03
