艦載光電伺服設(shè)備的系統(tǒng)辨識研究
2014-11-09 09:08:06周俊鵬王一卉
液晶與顯示 2014年5期
周俊鵬,李 焱,王一卉,陳 娟
(長春工業(yè)大學(xué) 電氣與電子工程學(xué)院,吉林 長春 130012)
1 引 言
可信度高的系統(tǒng)辯識獲取電機(jī)機(jī)械時間常數(shù)Tm和固有放大倍數(shù)K的精度高,從而得到的電機(jī)傳遞函數(shù)模型準(zhǔn)確。Tm的倒數(shù)是速度環(huán)的第二個拐點與調(diào)節(jié)器構(gòu)成的系統(tǒng)影響B(tài)ODE圖低頻段的走勢,根據(jù)自控原理低頻段增益及其走勢直接影響系統(tǒng)穩(wěn)態(tài)精度和動態(tài)精度,獲得準(zhǔn)確的Tm和K,能使控制模型準(zhǔn)確,從而穩(wěn)態(tài)、動態(tài)精度相對越高。常規(guī)系統(tǒng)辯識方法均從直流電機(jī)微分方程出發(fā),并沒有給出具體實施方案和實施過程[1-2],只是利用電流與時間的關(guān)系圖得到電流值的63.2%,其對應(yīng)的時間即為機(jī)械時間常數(shù)而電機(jī)空載條件下運行,測出空載機(jī)械特性計算出電動機(jī)轉(zhuǎn)動慣量,進(jìn)而從導(dǎo)出公式中計算出Tm,但此方法只能適應(yīng)具有大轉(zhuǎn)動慣量的電機(jī),沒有太大的實用價值[3]。利用最小二乘構(gòu)造倆參數(shù)線性方程,求出機(jī)械時間常數(shù),其計算過程繁瑣,只適用于某些電機(jī)而不具有普遍性[4],構(gòu)造更復(fù)雜的三參數(shù)最小二乘線性方程,僅僅從理論出發(fā),沒有實際工程背景,并不具有實用價值[5]。利用掃頻法測出系統(tǒng)輸入與輸出的關(guān)系,在MATLAB中的simulink環(huán)境下開發(fā)遞推最小二乘在線系統(tǒng)辯識,有其應(yīng)用的局限性,精度不是很高[6],卡爾曼濾波辯識算法,雖然給出來精度,但運算量過大,不利于艦載伺服系統(tǒng)對Tm的獲取[7]。另外,有些方法導(dǎo)出Tm和時間的積分關(guān)系,將積分轉(zhuǎn)化為梯形面積,但沒有給出可信度、精度和工程可行性[8]。設(shè)計并利用Origin中近似逼近e指數(shù)函數(shù)擬合方法,其擬合誤差小于0.1,可信度達(dá)到96%以上,解決了上述傳統(tǒng)方法在獲取電機(jī)機(jī)械時間常數(shù)精度低,可信度不高的問題。該項技術(shù)成功地應(yīng)用在項目中,其擬合階躍法對獲取電機(jī)機(jī)械時間常數(shù)有很好的通用性和借鑒性。
2 伺服系統(tǒng)實現(xiàn)
2.1 PC104硬件平臺
選X86架構(gòu)的PC104嵌入式計算機(jī)作為目標(biāo)機(jī)的伺服控制系統(tǒng)核心處理器,128M的CF卡作為外部程序機(jī)為核心處理器,128M的CF卡作為外部程序存儲器。顯控系統(tǒng)硬件實物如圖1所示。分別設(shè)計定義了16C754四路串口的基地址分別為0x330、0x348、0x298、0x240,中斷號分別為0x04、0x05、0x03、0x07。定義了82C55按照A路輸入,B、C路輸出的方式工作,基地址為0x3e0。FPGA為顯控系統(tǒng)各芯片提供地址譯碼,并在外部準(zhǔn)秒脈沖同步基礎(chǔ)上產(chǎn)生16、25、400Hz的內(nèi)部分頻信號。通過INTEL 82559ER的網(wǎng)絡(luò)控制芯片與外部通道臺進(jìn)行UDP網(wǎng)絡(luò)的信息交互。
如圖1所示,此硬件作為伺服系統(tǒng)辨識的平臺,進(jìn)行軟件開發(fā)。
2.2 軟件實現(xiàn)
由旋轉(zhuǎn)變壓器反饋出來的速度碼值用aa_0來表示,速度環(huán)開環(huán)輸出碼值用axk來表示。在TL16C754A口中斷程序中設(shè)定axk的碼值,編碼器的采樣周期0.0025s,這樣就可以得到旋轉(zhuǎn)變壓器反饋速度值aa_0。在程序的主函數(shù)中設(shè)置輸出函數(shù)fprintf(fp1,"%04d%08.4lf%06ld/n",++Store_Counter,aa_0,encodera_0),便于讀出旋轉(zhuǎn)變壓器的值,流程圖如圖2所示。在CCS3.3中通過選擇存盤操作可以得到DAT文件,即可直接用word的EXCEL文件打開,選擇適當(dāng)值。
人機(jī)交互界面采用多任務(wù)機(jī)制,具有優(yōu)先級且任務(wù)間具備同步優(yōu)點;多任務(wù)間的通信;中斷延遲、任務(wù)切換、驅(qū)動程序延遲等操作系統(tǒng)行為是可知和可預(yù)測的。見人機(jī)交互界面圖3,可以在界面上方便的顯示、修改Tm和K值,不用編譯函數(shù)體。
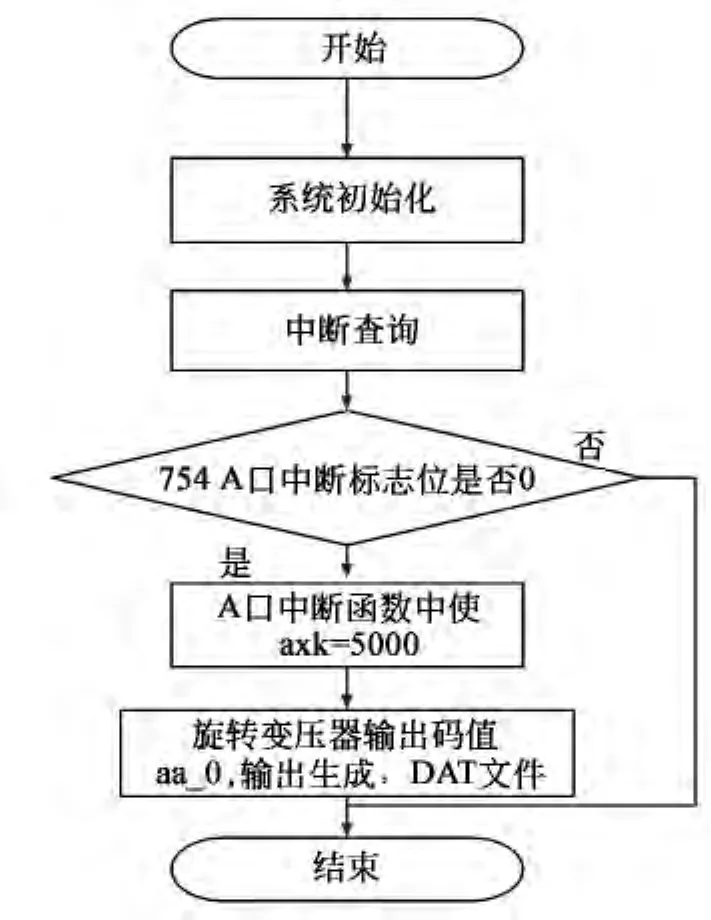
圖2 A口中斷流程圖Fig.2 Flow chart of port A interruption
圖3 人機(jī)交互界面圖Fig.3 Man-machine interface diagram
此顯控系統(tǒng)中右面前4列分別對應(yīng)Tm、K、精度可信度,可見此人機(jī)交互界面直接讀取Tm和K,及相關(guān)參數(shù)方面非常方便實用。
3 系統(tǒng)辨識的研究分析
3.1 近似逼近e指數(shù)函數(shù)理論依據(jù)
根據(jù)電壓平衡方程式和負(fù)載為零時轉(zhuǎn)矩平衡方程式,以及機(jī)電時間常數(shù)、電氣時間常數(shù)計算公式可得:
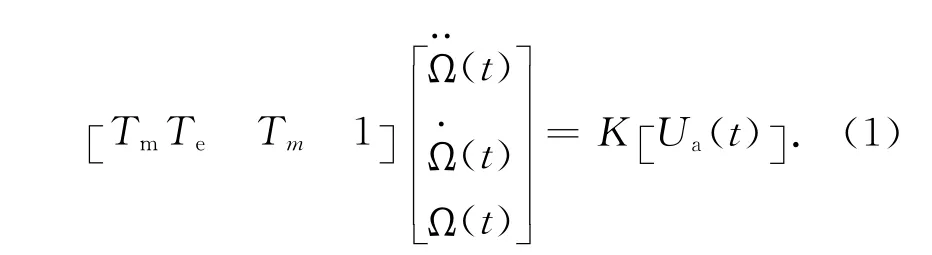
其中:Tm為機(jī)電時間常數(shù),Te為電氣時間常數(shù),Ω(t)為電機(jī)角速度,Ua為電機(jī)端電壓。
其中:Ce為電動勢常數(shù),Φ為磁通量。
零初始條件下對式(1)做拉氏變換可得:
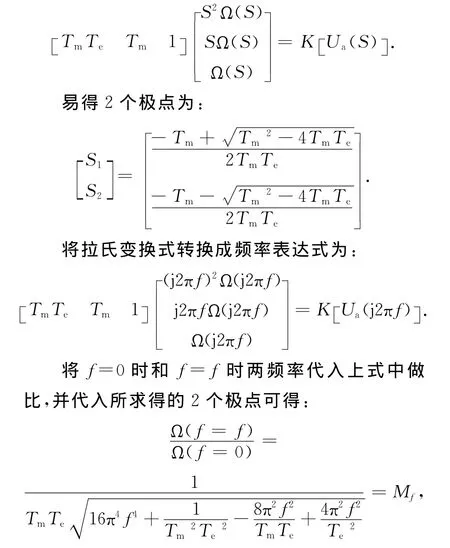
其中:Mf為電壓頻率為f時電機(jī)的角速度與電壓頻率為0時電機(jī)角速度的比值。由上式可得:

此公式作為階躍法擬合曲線公式的依據(jù)。
3.2 近似逼近的e指數(shù)系統(tǒng)辨識模型
對于公式法帶來的不便,且大多方法逼近真實值的精度很低,利用Origin擬合e指數(shù)函數(shù)方法其可信度高達(dá)96%以上,而且e指數(shù)的函數(shù)表達(dá)式用計算機(jī)很容易實現(xiàn)。在OriginPro7.0中根據(jù)公式:

將速度輸出碼值通過e指數(shù)函數(shù)轉(zhuǎn)化成連續(xù)函數(shù)。根據(jù)式(2)使用擬合函數(shù)為:

其中:Y為旋轉(zhuǎn)編碼器反饋速度碼值(即aa_0的值),X為對應(yīng)碼值的序號。
P1、P2為最終需要擬合的未知量對應(yīng)的機(jī)械時間常數(shù)和固有放大倍數(shù)。這樣就可以通過測量得到的輸出速度碼值和對應(yīng)的碼值序號,通過式(3)以及 Origin擬合轉(zhuǎn)換出未知量 P1、P2,得到最終的近似逼近e指數(shù)函數(shù),從而獲得高可信度和精度的系統(tǒng)辨識。

其中:P1,P2為通過Origin擬合出來的數(shù)值,axk為開環(huán)輸出速度碼值,T為采樣周期800Hz。
4 Origin擬合實現(xiàn)及分析
4.1 系統(tǒng)辨識實現(xiàn)過程
為提高獲得Tm和K的準(zhǔn)確性,在試驗中正向、反向各測兩次,最后取平均值經(jīng)過計算即可得到所需時間常數(shù)和放大倍數(shù)。在中斷程序中設(shè)置速度開環(huán)輸出的碼值axk=5000(正向),axk=-5000(反向),用旋轉(zhuǎn)變壓器得到的2000多組值,導(dǎo)入originPro中,通過擬合可得所需近似逼近e指數(shù)函數(shù),從而計算出Tm和K。
圖4~圖7中橫軸為旋轉(zhuǎn)變壓器的碼值所對應(yīng)的序號值,縱軸為旋轉(zhuǎn)變壓器輸出的碼值,黑實線代表真實值曲線,紅虛線代表按照近似逼近e指數(shù)函數(shù)300次連續(xù)逼近擬合后的曲線。從階躍曲線中可以看出正向第一次擬合低碼段,與真實曲線有細(xì)微的偏差。反向第一次測量其低碼段有不明顯的偏離,四幅擬合曲線圖中的中高碼段與真實曲線基本完全重合。可見應(yīng)用Origin軟件,按照近似逼近e指數(shù)函數(shù)去逼近真實曲線的效果很好。從圖4和圖6旁邊的小放大圖中可清楚看到。

圖4 正向第一次擬合曲線圖Fig.4 Positive first fitting curves picture
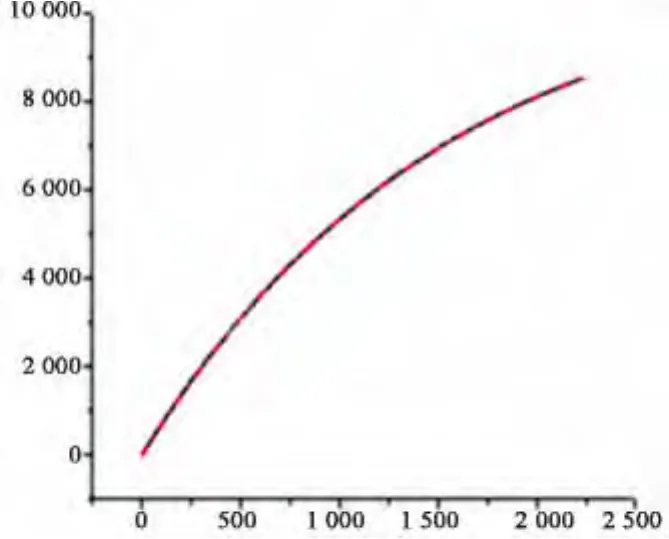
圖5 正向第二次擬合曲線圖Fig.5 Positive second fitting curves picture
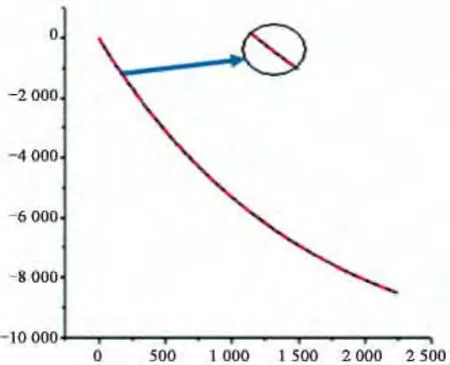
圖6 反向第一次擬合曲線圖Fig.6 Negative frist fitting curves picture
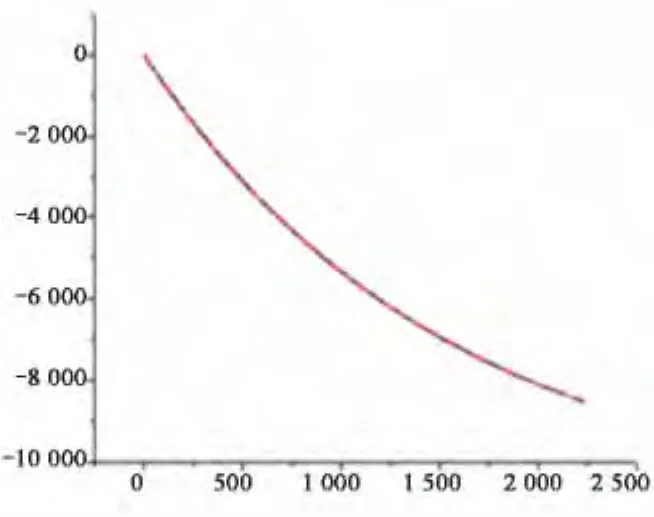
圖7 反向第二次擬合曲線圖Fig.7 Negative second fitting curves picture
4.2 系統(tǒng)辨識精度分析
為方便得到試驗結(jié)論,從Origin中提出數(shù)據(jù)得到表1,從表1中可清晰看出可信度都大于96%,誤差均小于0.1,完全滿足工程中所需精度要求。另外,可從表1中計算出P1的平均值為11067.22867,P1的誤差平均值為0.0954。P2的 誤差平均值為0.0257,P2的平均值為1530.074615。通過式(4)和式(5)最終得到電機(jī)固有放大倍數(shù)為:K=2.2134,由于旋轉(zhuǎn)變壓器采樣頻率為800Hz即0.00125s可知電機(jī)機(jī)械時間常數(shù)為1.9126s。所求值亦可在前述顯控系統(tǒng)中顯示。
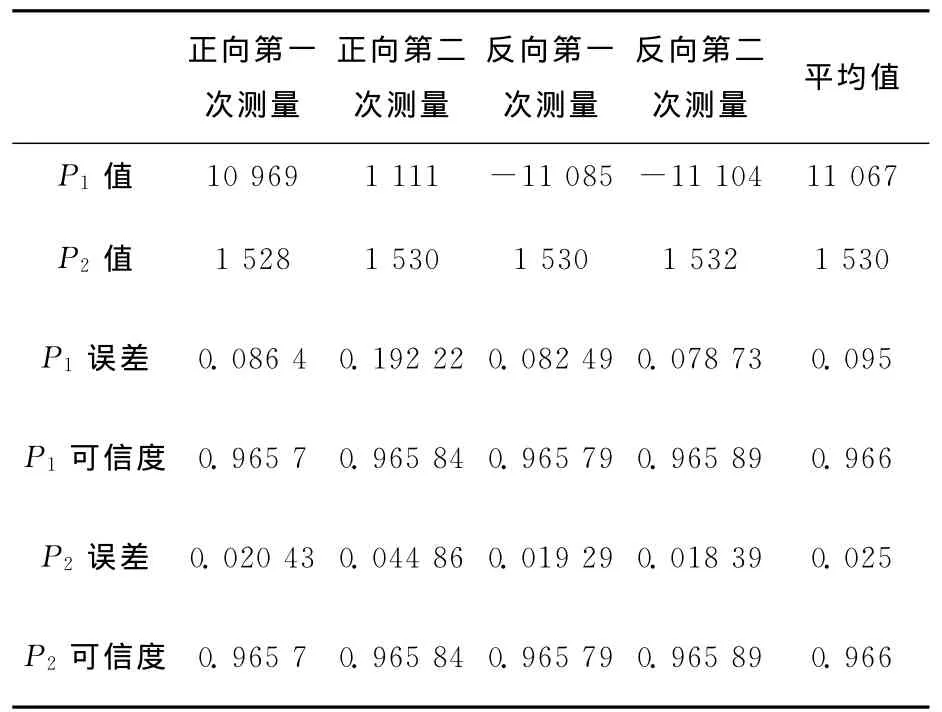
表1 試驗數(shù)據(jù)擬合值表Tab.1 Test data fitted value
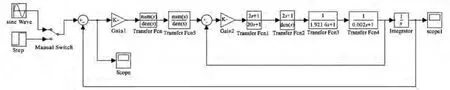
圖8 光電經(jīng)緯儀模型方框圖Fig.8 Optical-electrionic theodolite model block diagram
4.3 控制精度對比分析
常規(guī)法計算機(jī)械時間常數(shù)公式為

其中:GD2為轉(zhuǎn)動慣量,R為電阻,Ce為電動勢常數(shù),Cm為電磁轉(zhuǎn)矩常數(shù),Φ為磁通量。將廠家給出的電機(jī)常數(shù)帶入式(6)中得Tm=1.9987s。光電經(jīng)緯儀要求最大角速度48°/s,最大角加速度22°/s2,經(jīng)計算可得到等效正弦,將此參數(shù)帶入圖8的Sine Wave中。再分別將常規(guī)公式法得到的Tm=1.9987和由e指數(shù)擬合階躍法得到的Tm=1.9216帶入圖8中的 Transfer Fcn4中,通過以上實際模型,經(jīng)由 MATLAB中的SIMULINK仿真得到如圖9(a)、(b)所示。
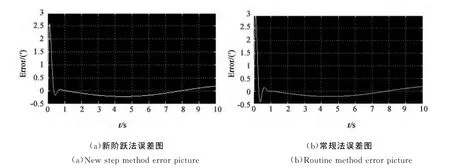
圖9 跟蹤誤差對比圖Fig.9 Tracking error comparsion picture
從圖9中可清晰看到常規(guī)法最大誤差3′,e指數(shù)階躍法最大誤差為2.5′,跟蹤誤差明顯得到改善。
5 結(jié) 論
經(jīng)過試驗對比分析可知,用e指數(shù)擬合的階躍法誤差小于0.1,其置信度達(dá)到96%以上,彌補(bǔ)了公式法獲取Tm上的種種不足,并且克服了其他方法獲取Tm困難、可信度和精度不高的難題。從跟蹤誤差對比圖中可看到新方法得到誤差減小0.5’,可看到此方法在提高跟蹤精度方面的優(yōu)越性。同時方便的得到放大倍數(shù)K,電機(jī)電氣時間常數(shù)Te可通過萬用表測得,從而得到電機(jī)傳遞函數(shù)。在開發(fā)的人機(jī)交互界面上方便的修改、顯示系統(tǒng)辯識結(jié)果。此方法在實際應(yīng)用中方便、可行、有效,能夠滿足項目對Tm的精度需要。對系統(tǒng)辯識具有很好的通用性和借鑒性。
[1]苗本健.伺服電動機(jī)動態(tài)參數(shù)辨識問題[J].伺服控制,2013(1):39-41.Miao B J.Servo motor dynamic parameter identification problem [J].Servo Control,2013(1):39-41.(in Chinese)
[2]蔡莎莎,毛曉明,陳志勇,等.同步電機(jī)調(diào)速系統(tǒng)參數(shù)辯識研究進(jìn)展與展望[J].廣東電力,2012,25(10):29-32.Cai S S,Mao X M,Chen Z Y,et al.Research progress and prospect of reference identification of synchronous motor speed control system [J].Guangdong Power,2012,25(10):29-32.(in Chinese)
[3]張文海.伺服電動機(jī)的時間常數(shù)問題[J].微特電機(jī),2012,40(8):75-76.Zhang W H.Time constant problem of servo motor[J].Emotorcn,2012,40(8):75-76.(in Chinese)
[4]馮清青.永磁直流電機(jī)測試系統(tǒng)研究[D].哈爾濱:哈爾濱工程大學(xué),2012.Feng Q Q.Research on permanent magnetic DC motor testing system [D].Harbin:Harbin Engineering University,2012.(in Chinese)
[5]劉瓊.直流伺服系統(tǒng)模型及其辯識[J].電氣傳動自動化,2012,34(6):18-21.Liu Q.The model and identification of DC servo system [J].Electric Drive Automation,2012,34(6):18-21.(in Chinese)
[6]張升.永磁無刷直流電機(jī)速度控制與模型參數(shù)辯識研究[D].北京:北方工業(yè)大學(xué),2013.Zhang S.Speed control and model parameters identification study of permanent magnet brushless DC motor[D].Beijing:North China University of Technology,2013.(in Chinese)
[7]王建峰,張?zhí)旌?基于 MATLAB/XPC的直流電機(jī)參數(shù)辯識及雙閉環(huán)控制研究[J].測控技術(shù),2011,30(12):32-36.Wang J F,Zhang T H.Study on parameter identification of DC motor and double closed loop control based on MATLAB/XPC [J].Measurement & Control Technology,2011,30(12):32-36.(in Chinese)
[8]魏彤,郭蕊.自適應(yīng)卡爾曼濾波在無刷直流電機(jī)系統(tǒng)辯識中的應(yīng)用[J].光學(xué)精密工程,2012,20(10):2308-2314.Wei T,Guo R.Application of adaptive Calman filter in Brushless DC motor system identify-cation[J].Optics and Precision Engineering,2012,20(10):2308-2314.(in Chinese)
[9]喻冬梅,幸明強(qiáng),汪建兵.無刷直流電動機(jī)Tm和Tl測量方法[J].艦船科學(xué)技術(shù),2011,33(10):86-88.Yu T M,Xing M Q,Wang J B.Brushless DC motor Tmand Tlmeasurement method[J].Ship Science and Technology,2011,33(10):86-88.(in Chinese)
[10]潘先喜.永磁同步電機(jī)的伺服控制系統(tǒng)研究與實現(xiàn)[D].武漢:武漢理工大學(xué),2011.Pan X X.Research and implementation of control system of permanentmagnet synchronous motor servo[D].Wuhan:Wuhan University of Technology,2011.(in Chinese)
[11]李焱,曹立華,王弟男.慣導(dǎo)平臺下艦載光電搜索跟蹤系統(tǒng)的控制[J].光學(xué)精密工程,2011,19(5):1126-1123.Li Y,Cao L H,Wang D N.Controlling of shipborne optoelectronic searching and tracking system based on inertial navigation platform [J].Optics and Precision Engineering,2011,19(5):1126-1133.(in Chinese)
[12]李焱,陳濤,曹立華.艦載光電設(shè)備跟蹤掠海目標(biāo)的控制[J].光學(xué)精密工程,2010,18(5):936-941.Li Y,Chen T,Cao L H.Control of ship-based optoelectronic equipment for tracking near-sea targets[J].Opticsand Precision Engineering,2010,18(5):936-941.(in Chinese)
[13]趙磊,王學(xué)亮,鞏巖.基于FPGA的液晶顯示屏測試用標(biāo)準(zhǔn)白場裝置[J].液晶與顯示,2014,29(1):94-100.Zhao L,Wang X L,Gong Y.FPGA based white field apparatus for LCD calibration[J].Chinese Journal of Liquid Crystals and Displays,2014,29(1):94-100.(in Chinese)
[14]趙梓權(quán),王瑞光,鄭喜鳳,等.LED顯示屏的色域校正[J].液晶與顯示,2013,28(1):92-98.Zhao Z Q,Wang R G,Zheng X F,et al.Color Gamut correction of LED Displays[J].Chinese Journal of Liquid Crystals and Displays,2013,28(1):92-98.(in Chinese)
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學(xué)生數(shù)理化(高中版.高考理化)(2020年11期)2020-12-14 07:36:08
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
通信電源技術(shù)(2018年3期)2018-06-26 06:33:30
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
現(xiàn)代工業(yè)經(jīng)濟(jì)和信息化(2016年4期)2016-05-17 05:35:38
通信電源技術(shù)(2016年3期)2016-03-26 07:13:46