動態目標識別中的實時復雜巡航場景運動檢測
2014-11-09 09:08:20武治國李桂菊
液晶與顯示 2014年5期
武治國,李桂菊
(中國科學院 長春光學精密機械與物理研究所,吉林 長春 130033)
1 引 言
運動目標檢測在工業控制、生物醫學、交通監控、安防、天文觀測等領域有著廣泛的應用。因此,一直以來是圖像處理領域的重要研究熱點。在應用中根據被檢測的場景與攝像機之間是否存在相對運動,而分為靜止背景和運動背景兩類。對于復雜的巡航場景的目標探測,相對于只存在目標運動的靜止背景或者背景只發生微小變化的動態目標檢測,由于目標與背景物體融合在一起并且二者都處于運動中,大大地增加了運動目標檢測和識別的復雜度。
針對復雜巡航場景目標檢測的工程應用,通常需要補償背景圖像與當前圖像的全局運動,計算圖像間的位置偏移,將巡航場景目標檢測問題轉化為靜止背景識別問題。比較簡單的方式是通過攝像機的實時旋轉運動參數計算圖像的位置偏移,但是由于攝像機曝光時刻以及攝像機抖動等所造成的影響,無法準確計算出圖像的運動偏移量。因此需要結合圖像間的信息實現場景的運動估計。模板匹配方法,實時性高,但具有抗噪聲、抗干擾能力比較差的局限性[1-5]。SIFT 算子,Harris角點檢測算子等特征提取方法具有能夠適應環境光照變化等優點,但計算代價較大,運算時間較長。C Kuglin,D Hines采用傅立葉變換的相位相關法進行背景運動補償,由于其邊界效應會影響圖像的交叉能量譜,從而降低偏移量估計的精度,同時計算復雜無法滿足工程上的實時性應用要求。
為了避免以上方法存在的問題,本文根據圖像邊緣信息具有抗光照變化,抗干擾能力強的性質,計算背景圖像與當前幀圖像間邊緣位置互相關性,檢測出兩幅圖像之間的平移量,估計運動參數,從而實現實時準確的場景運動檢測。
2 巡航場景運動檢測
2.1 場景邊緣提取
圖像的邊緣是具有不同灰度的區域的邊界,它反映了灰度的階越變化,是圖像灰度的急劇變化區域,包含著場景中有價值的邊界信息,是圖像分析的重要依據。Sobel算子能夠平滑噪聲,對噪聲具有抑制能力,同時它計算方法簡單,有利于實時處理的應用要求。因此本文采用Sobel算子對背景和當前圖像進行卷積處理,提取邊緣。
Sobel算子是基于一階微分的邊緣檢測方法,本文采用如下x和y方向的窗口算子。
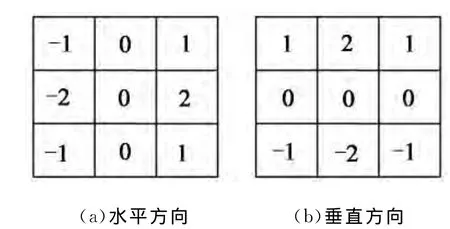
圖1 Sobel窗口算子Fig.1 Sobel window operator
2.2 待檢測模型選取
為了檢測背景幀圖像相對于當前幀圖像的偏移量,通常采用方法是在背景幀圖像和當前幀圖像中計算匹配點或匹配塊,根據匹配的位置差異計算幀間偏移量。
如果背景圖像中的特征信息不足,場景較單一或存在較多干擾。這樣就造成浪費大量的處理時間,甚至場景運動檢測失效。因此配準模型應該選取圖像中信息豐富的部分。局部熵刻畫了圖像中局部區域變化的劇烈程度。局部熵反映了邊緣圖像的離散程度,在局部熵大的地方,邊緣圖像相對均勻;局部熵小的地方,邊緣圖像離散性越大。
設F(i,j)為邊緣圖像中點(i,j)處的灰度值,對于M×N的局部窗口,局部熵為:
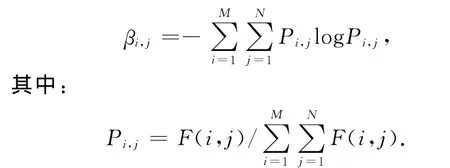
βi,j反映了邊緣圖像窗口內的灰度變化率大小。在邊緣圖像中相對較均勻的地方,局部熵就大,βi,j的值也越大;邊緣圖像相差較大的地方,局部熵小。
局部熵計算涉及到對數運算,計算工作量大運行速度慢。可由泰勒展開舍去高次項,得到近似計算公式:

本文將背景幀邊緣圖像分成N塊,計算每塊的局部熵,選取局部熵最小的M塊邊緣圖像作為配準模型。這樣既減小匹配計算量,同時又提高運動矢量檢測準確性。
2.3 配準模型計算
圖像配準是將圖像中的場景穩定在同一幀圖像的相同位置上,即計算當前幀相對背景幀來說在X方向和Y方向上各運動了多少像素,然后根據偏移量移動當前幀圖像與前一幀配準。
由于背景幀中選取的配準模型可能在當前幀圖像中包含運動目標,但一般情況下,運動目標與場景相比只占圖像的小部分區域,如果考慮匹配的圖像中局部熵塊的運動矢量,無目標塊的矢量應該具有一致性,也就是說大部分塊運動矢量的長度應該相等,相關性強,而當前圖像中含有目標的塊的相關性差。
2.4 巡航場景運動估計
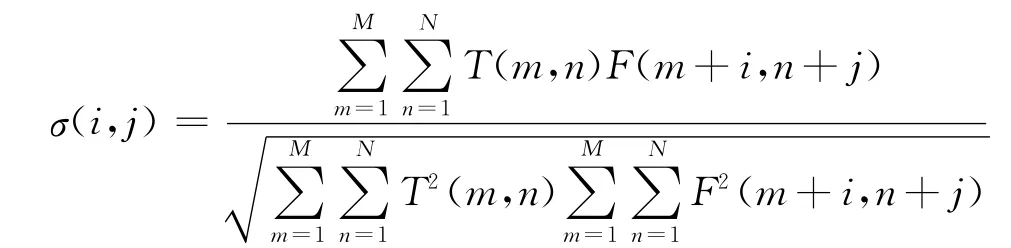
兩幅圖像之間的匹配是通過將模板圖像與待匹配圖像進行相關運算,得到一個相似度,根據相似度的大小就可以判斷二者是否匹配。當二者匹配時,可以得到模板圖像在待匹配圖像中的位置。邊緣的場景圖像與當前幀圖像的相似度計算公式為:
為了消除匹配的誤差及運動目標的干擾,對M塊背景模板邊緣圖像分別計算運動矢量,統計其直方圖分布,濾除奇異值。對剩余的K塊模版計算所得的運動矢量,根據它們的相似度分別計算x方向和y方向的位移矢量。
取得場景運動矢量后,動態目標檢測便可根據運動矢量,補償當前幀圖像。對背景圖像和補償后的圖像,采用差分運算消除場景圖像,提取前景運動目標。
3 實驗結果與分析
為了驗證算法的有效性和實時性,以PC機(Pentium 4CPU 2.8GHz,2GB內存)做為實驗平臺,對上述算法進行仿真,測試效果分別如圖所示。
(1)實驗一 山林中放火的長波紅外數字圖像
實驗圖像分辨率為320×256,14位灰度級。紅外圖像如圖2所示。圖像中背景圖像和當前幀圖像位置發生偏移,火點位置火焰面積和亮度發生變化。
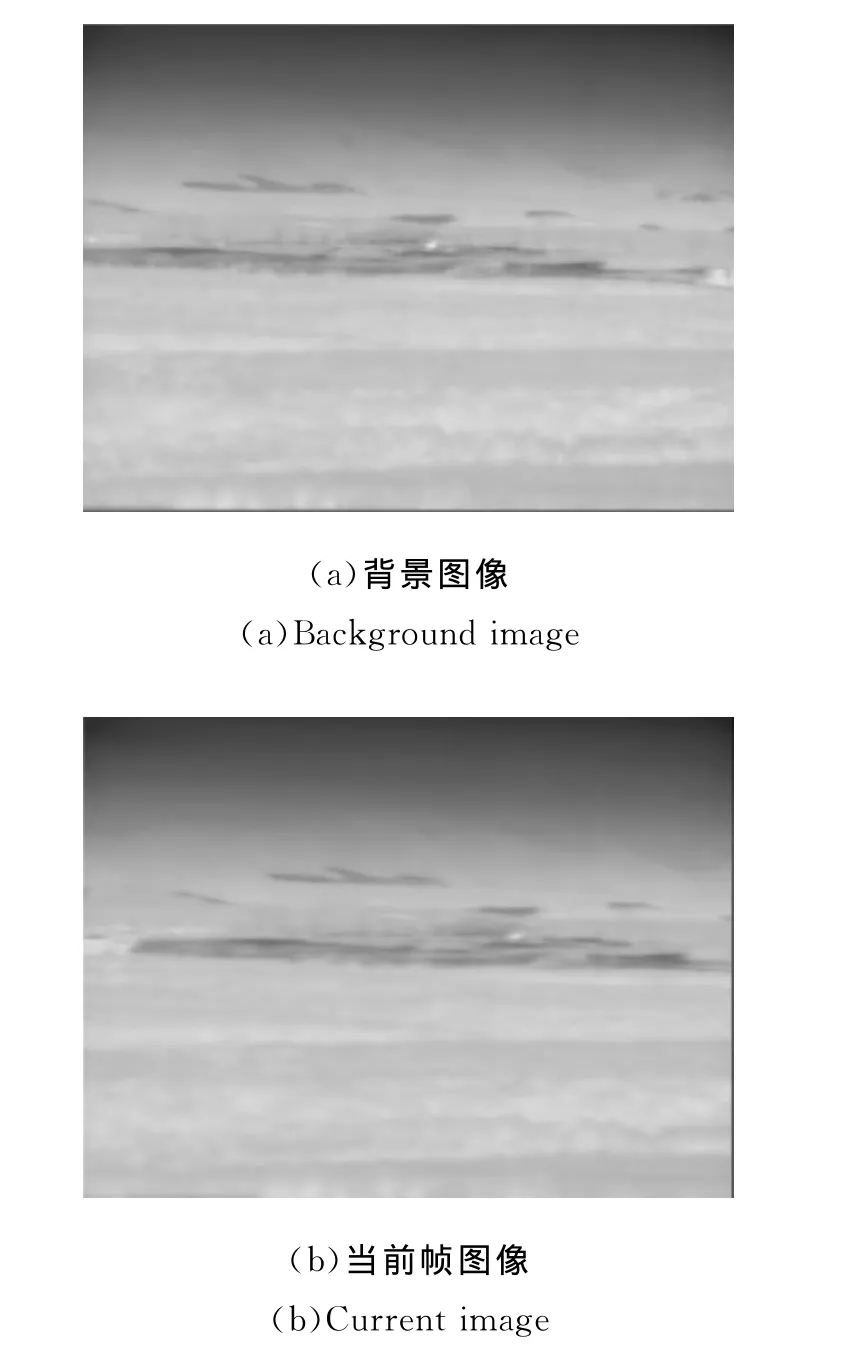
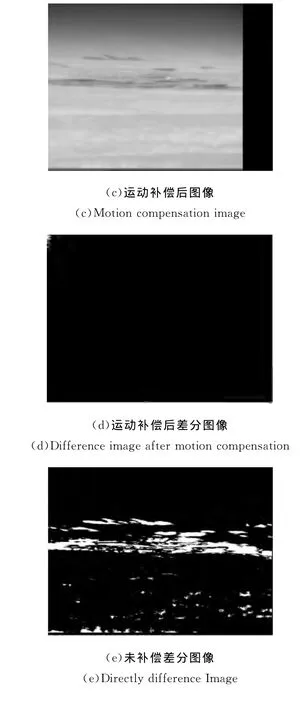
圖2 紅外實驗圖像Fig.2 Infrared images experiment
圖2(d)為本文方法場景運動補償后,背景圖像與當前幀補償后圖像相減并二值化后的結果。算法耗時13ms,完全滿足工程中紅外圖像50frame/s的實時圖像處理要求。檢測結果為x方向運動41個像素,y方向運動3個像素。結果中可以看出背景圖像已經背完全剔除,只剩下發生變化的火點。而圖像(e)為背景圖像與當前幀圖像直接相減并二值化后的結果,圖像中包含大量的山脈及林木背景。
(2)實驗二 林區中煙霧的可見光模擬圖像
實驗圖像如圖3所示,分辨率為768×576,8位灰度級。可以看到兩幅圖像中煙霧發生明顯變化,在圖像上包含大量鏡頭上的臟點所成的像,這對場景運動估計造成很大影響。


圖3 可見光實驗圖像Fig.3 Visible image experiment
圖3(d)為本文方法場景運動補償后,背景圖像與當前幀補償后圖像相減并二值化后的結果。算法耗時24ms,低于模擬視頻圖像25frame/s的采集頻率。檢測結果為x方向運動11個像素,y方向運動2個像素。差分結果圖像只檢測出了發生變化的動態煙霧目標。而圖3(e)為中不僅包含了煙霧,而且含有背景中物體,對運動目標識別造成嚴重影響。
4 結 論
在復雜運動場景中的動態目標識別檢測的工程應用中,通常需要首先檢測計算出背景圖像的運動,再依據目標的特征來識別目標。為了滿足處理速度實時并保證目標檢測準確有效的需要,本文首先對背景及當前幀圖像提取邊緣圖像,根據背景邊緣圖像中不同分塊的局部熵,合理選取配準模型,進而通過計算與當前幀邊緣圖像的相關性,實現當前幀圖像相對于背景的運動估計。通過紅外與可見光圖像的實驗,結果表明本文方法實時準確的檢測出了當前幀與背景之間的運動偏移,通過背景與補償后的圖像有效的計算出了當前幀中的運動變化目標,是一種非常適合于工程中應用的場景運動檢測技術。
[1]劉文萍,賀娜.一種新的背景減運動目標檢測方法[J].計算機工程與應用,2011,47(22):175-179.LIU W P,HE N.Moving object detection method based on background subtraction [J].Computer Engineering and Applications,2011,47(22):175-179.(in Chinese)
[2]梅躍松,于劍橋,陳曦.移動背景下的運動目標跟蹤[J].紅外與激光工程,2011,40(4):757-761.Mei Y S,Yu J Q,Chen X.Moving object tracking in the moving background[J].Infrared and Laser Engineering,2011,40(4):757-761.(in Chinese)
[3]Guan Y P.Spatio-temporal motion-based foreground segmentation and shadow suppression [C].Proceedings of Computer Vision,2010:50-60.
[4]Hafiz F.Foreground segmentation-based human detection with shadow removal[C].Proceedings of International Conference on Computer and Communication Engineering,2010:1-6.
[5]Bayona A.Stationary foreground detection using background sub-traction and temporal difference in video surveillance[C].Proceedings of the 17th IEEE International Conference on Image Processing,2010:4657-4660.
[6]Huang M.A study of moving object detection based on combining background profile difference algorithm [C].Proceedings of the 2nd International Conference on Industrial and Information Systems,2010:425-428.
[7]吳本濤,吳敏淵,曾霖.自適應搜索的快速分塊跟蹤[J].光學精密工程,2011,19(3):703-708.Wu B T,Wu M Y,Zeng L.Fast fragment based tracking using adaptive search [J].Optics and Precision Engineering,2011,19(3):703-708.(in Chinese)
[8]侯晴宇,張偉,武春風,等.改進的均值移位紅外目標跟蹤[J].光學精密工程,2010,18(3):764-770.Hou Q Y,Zhang W,Wu C F,et al.Improved mean-shift based IR target tracking algorithm [J].Optics and Precision Engineering,2010,18(3):764-770.(in Chinese)
[9]吳君欽,劉昊,羅勇.靜態背景下的運動目標檢測算法[J].液晶與顯示,2012,27(5):682-685.Wu J Q,LIU H,Luo Y.Algorithm of moving object detection in static background[J].Chinese Journal of LiquidCrystals and Displays,2012,27(5):682-685.(in Chinese)
[10]孫輝.相位相關技術實現離焦模糊圖像運動估計[J].液晶與顯示,2012,27(2):223-228.Sun H.Estimation of displacement for out-of-focus blurred image using phase-only correlation[J].Chinese Journal of Liquid Crystals and Displays,2012,27(2):223-228.(in Chinese)
[11]盧官明,謝雙.自適應背景更新及運動目標檢測算法[J].南京郵電大學學報:自然科學版,2013,33(3):12-17.Lu G M,Xie S.Adaptive background update and moving object detection[J].Journal of Nanjing University of Posts and Telecommunications :Natural Science,2013,33(3):12-17.(in Chinese)
[12]Denman S,Fookes C,Sridharan S.Improved simultaneous computation of motion detection and optical flow for object tracking[C].Proceedings of Digital Image Computing:Techniques and Applications,2009:175-182.
[13]Xiao B X.Moving object detection and recognition based on the frame difference algorithm and moment invariant features[C].Proceedings of the 27th Chinese Control Conference,2008:578-581.
猜你喜歡
汽車工程師(2021年12期)2022-01-17 02:29:54
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
當代陜西(2020年14期)2021-01-08 09:30:42
奧秘(創新大賽)(2020年7期)2020-07-27 08:26:32
貴州師范學院學報(2016年4期)2016-12-01 03:54:07
海峽科技與產業(2016年3期)2016-05-17 04:32:12