RV320工業機器人減速器中擺線齒廓的修形
2014-10-17 07:01:10趙錚
機電設備 2014年3期
關鍵詞:標準
趙 錚
● (天津百利天星傳動有限公司(原天津減速機總廠),天津 300000)
RV320工業機器人減速器中擺線齒廓的修形
趙 錚
● (天津百利天星傳動有限公司(原天津減速機總廠),天津 300000)
RV320減速器是工業機器人專用減速器。要求承載力高,回差小,體積小等。機械結構中只有擺線結構符合需要,但通用結構中擺線輪為標準齒廓,間隙大、回差大,應用時就要對其進行改進。對擺線齒廓進行修形分析后,得出的修形參數能形成多齒嚙合。同時在齒谷與齒頂間形成間隙形成油膜利于潤滑。回差也大大縮小,經試驗證明可滿足高精減速器需要。
RV減速器;擺線輪;等距修形;移距修形
0 引言
隨著工業生產技術發展,工業機器人擁有強大市場前景,核心的RV減速器的國產化需求日漸突出。RV減速器要求精度高、回差小、體積小、承載大。目前只有擺線結構能夠符合要求。現在通用擺線減速器齒廓都是標準齒形,加工時人為加大磨削量從而得到較小齒形,這種齒形不是標準齒廓且沒理論依據。標準齒形理論上是有半數齒嚙合,而這樣加工出來的齒形只有一個齒嚙合,嚴重影響擺線承載能力。為適應市場需要,通過對齒形的研究,分析出一種較理想的修形參數。可以使徑向間隙(即齒頂與齒根處間隙)在0.06mm~0.07mm,便于嚙合時形成油膜,并在嚙合處盡量逼近標準齒廓以減小回差。
RV的結構是一級行星與二級擺線傳動復合而成的新型結構。由于結構復合復雜又需要較高承載能力和高精度和較小的回差,所以對每個部件都有較高要求。
1 擺線輪的修形方式
1.1 修形方法
等距修形。加工擺線輪時,將磨輪半徑由標準rrp加大至rrp+Δrrp。所形成的擺線齒廓其短幅系數k1不變,是與標準齒形等距值不同的近似等距曲線。磨輪半徑增加時 Δrrp為正等距,相反為負等距,如圖1所示。
移距修形。加工擺線輪時,將磨輪向工作臺中心移動微小距離Δrp,即針齒中心圓半徑rp向擺線輪中心減小了Δrp,加工的齒形其偏心距、傳動比均與標準齒形相同,只是短幅系數由變為。磨輪向工作臺移動Δrp為正移距,相反為負移距,如圖2所示。
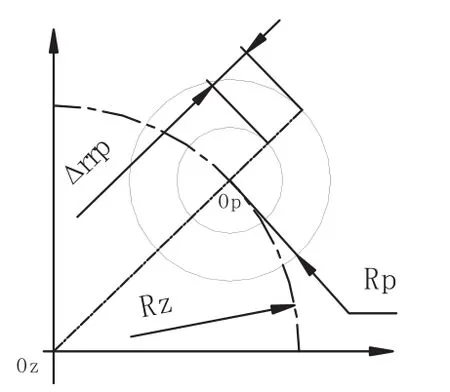
圖1 等距修形
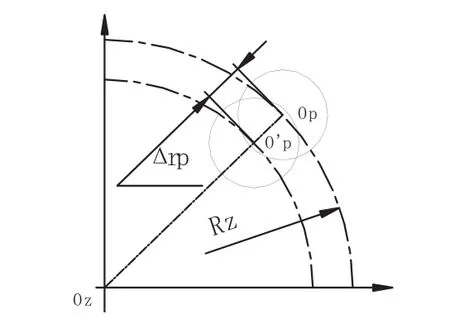
圖2 移距修形
轉角修形。加工擺線輪時,其它參數不變,只是相對于理論的針齒嚙合位置中,擺線輪中心向兩個不同的方向各轉動一個角度δ,使加工的擺線輪變小。此時形成的是擺線輪與針齒的共軛齒廓。但轉角修形所形成的齒形在徑向沒有產生間隙,故不能單獨使用,如圖3所示。
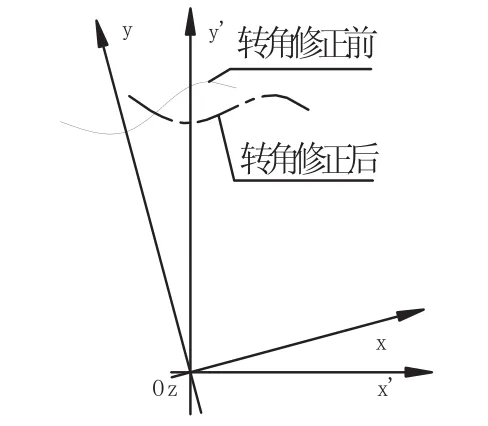
圖3 轉角修形
1.2 標準方程和修形方程
圖4為擺線齒廓圖。標準的擺線齒形方程如下:
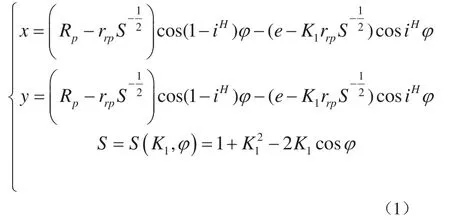
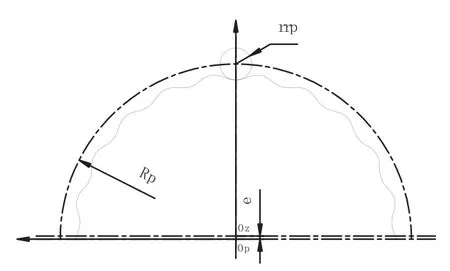
圖4 擺線齒廓
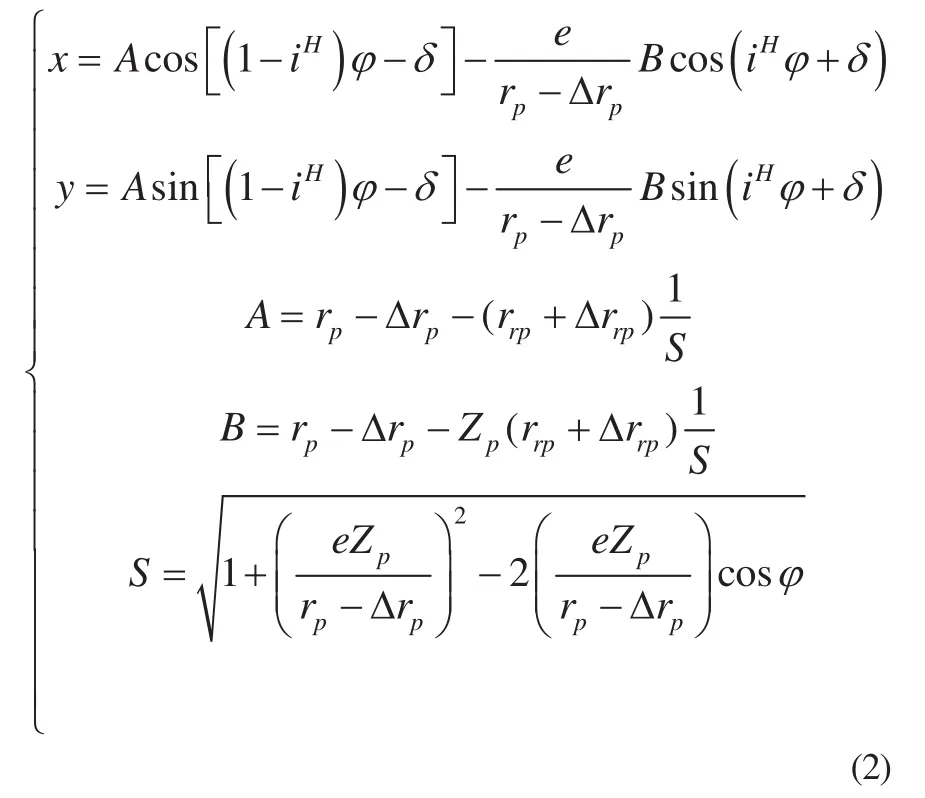
等距、移距、轉角修形參數融入方程中,其變換將rp-Δrp代替Rz,將代替K1。將rrp+Δrp代替其rz的數據,將iHφ+δ代替iHφ的數據。
變換后擺線方程所形成修形方程如下:
2 擺線輪優化修形的目標
修形原則為在擺線嚙合處與標準齒廓接近,在非嚙合處(即齒頂、齒谷位置)與針齒有一定的間隙用于存油(0.03mm~0.05mm)。這樣可以在保證嚙合的同時又減少其傳動產生的回差,如圖5所示。
修形原則總結出來有二點:
1)確保擺線輪齒形與針齒之間在齒頂與齒谷處有一個小小的間隙。
2)修形后始初始的間隙盡可能的小,在其嚙合處區域,與標準的理論齒廓相同。
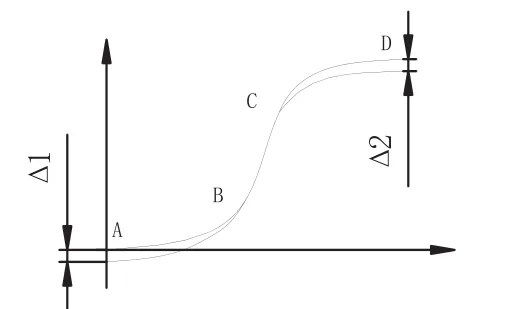
圖5 理想修形目標
3 擺線輪優化修形的方法
按同時嚙合齒數,初給其轉角修形參數δ=δC完合重合的齒形工作部分的界限B與C處的值φB和φC,并將此區間段進行N-1 等分,分別設φ1=φB, φ2, …,φn-1, φn= φC,將這些值代入公式3中,可求出其δ=δC時的轉角修形曲線的是坐標(xC1,yC1),這時初定一組等距修形和移距修形的參數Δrrp, Δrp(Δrrp-Δrp=Δj),由式2所確定的曲線是不可能正好與δ=δC的轉角修形齒形曲線工作區域完全重合的,而是= y(i=1,…,m),則C1與之間都存在著偏差值兩條曲線的偏離距離可以用n個點之間距離的絕對值,再取平均值來確定。即目標方程為:

再通過最優化方法,來確定其最佳的等距Δrrp和移距修形量Δrp,使:
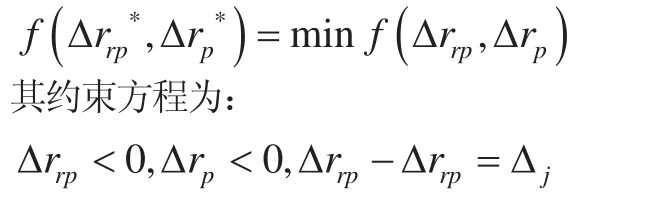
其參數就是使使曲線工作部分靠近轉角修形曲線,而在非工作部分留有間隙。
4 RV320修形參數的選定
目前的較常用的修形方法是正等路+負移距的修形方式。以此方法計算出的修形參數為:

由些參數所形成的擺線齒形齒廓曲線如圖6所示。用此修形方式。線1為標準的擺線齒廓曲線。線2為正等距與負移距修形后的擺線齒廓曲線。根據圖示可以看到,在齒根處保持了0.03mm的間隙,而在擺線齒形嚙合部分的區間內,其嚙合處的修形齒廓與標準的齒廓也存在了一定的間隙。而在RV這種高精度的擺線機構中,要求其傳動回差要小,這就對其齒側的間隙有了一定的要求。所以看到這個齒形會造成一定的間隙。造成其回差過大,使減速機在運轉過程中造成不平穩,及需要減速機正反轉時的精度性能大大下降。這樣不太符合RV高精度減速器對回差的要求。
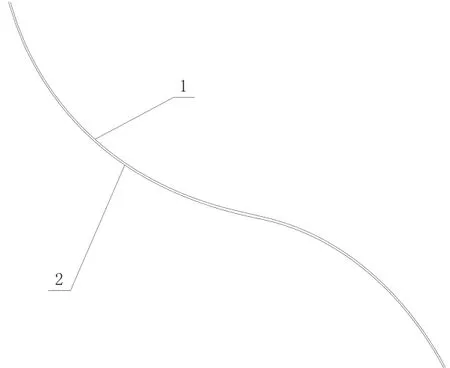
圖6 正等距加負移距修形
所以現在提出了一種負等距加正移距的修形方式。所以重新分配其修形量,將其擺線齒輪齒廓修形參數中的修形量改為:

而用此修形方式的齒廓曲線圖如7所示。
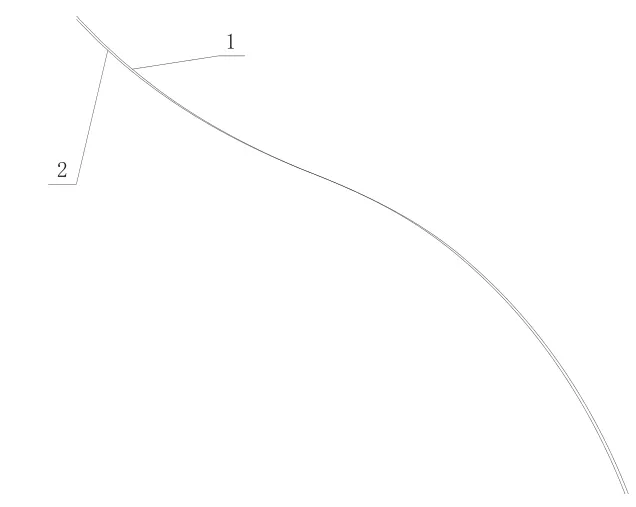
圖7 負等距加正移距修形
采用了此修形參數。線1為標準的擺線齒廓曲線。線2為負等距與正移距修形后的擺線齒廓曲線。我們可以看到。在齒谷和齒頂處的徑向間隙0.03mm與之前的修形相同,但在擺線齒的工作部分可以看到其修形后的擺線齒廓明顯的逼近了標準的擺線齒廓,其間隙在0.001mm左右與之前的側隙大大的減小了。之前的修形方式不能夠補償制造過程中產生的誤差和潤滑要求。而通過這樣的修形方式。可以迅速的提高齒輪的嚙合強度還能減小其回差傳動。這種不僅滿足了共軛齒廓條件。而且在不會制造新的間隙。這樣可以使瞬間的傳動比穩定。運動鏈傳動誤差減小。
經過上述的最優化方法求其修形量最終確定了其所有的基本參數如下:
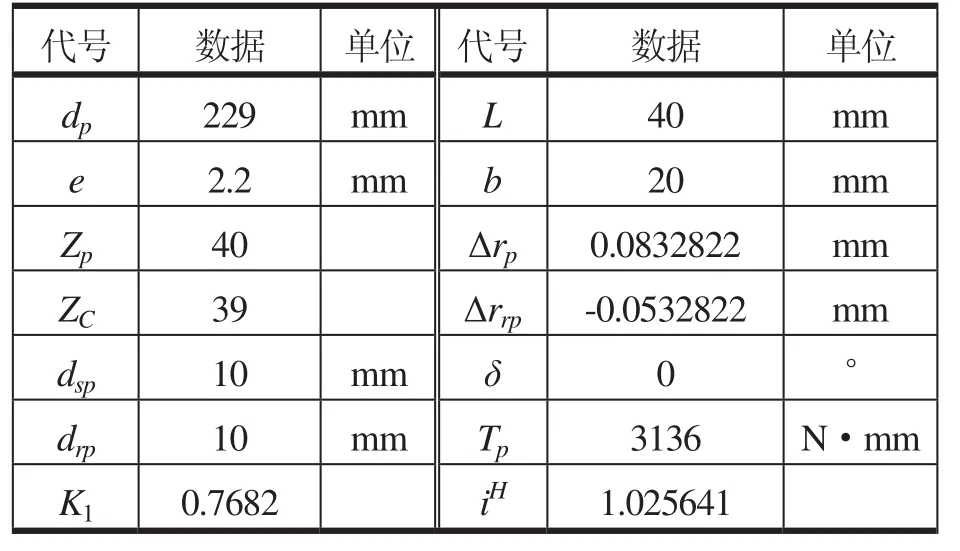
表1 RV320減速器基本參數
經過計算可知,其負等距+正移距修形可以得到最佳的齒形曲線。其曲線如圖8所示。線1為標準齒形曲線,線2為采用修形后的齒形曲線。
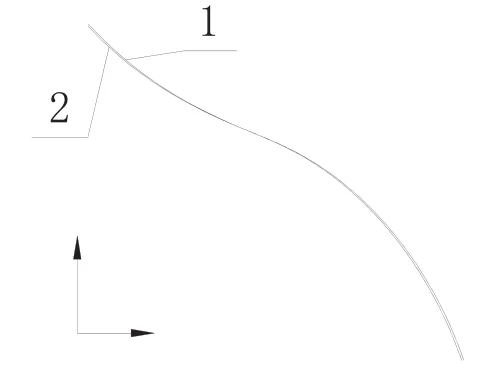
圖8 修形后與標準齒形曲線比較
5 結論
工業機器人專用精密減速器要求其回差小,精度高,剛性大承載能力強等特點。這就對減速器的制造精度和強度有了較高的要求。
非理論的修形,由于是其在加工制造中的誤差所產生,沒有其理論依據,故其造成的結果是只有一對齒參與嚙合。而采用正等距與負移距修形,雖然可以產生一定的間隙,但其側隙也較大,這樣不滿足對回差的要求。現在采用了一種新型的負移距與正等距的組合修形方式,從而提高了其共同嚙合齒數,達到了8對齒同時嚙合,可以大大的提高了其承載能力。又在嚙合處更加靠近了理論齒形,從而減小了回差。使修形后的減速器的承載能力較標準的沒修形的減速器的承載能力提高3~6倍。達到了工業機器人專用減速器的要求。同時使徑向間隙達到0.03mm,也滿足了潤滑對其徑向間隙的要求。
通過本修形參數,即負移距與正等距的組合修形方式。已應用于RV-320減速器和其它型號的工業機器人專業減速器和高精度的擺線減速器的研制中,已經達到了其預期的效果和目的。
[1]徐永賢, 郝寧, 李力行. RV 傳動的彈性誤差分析[J].大連鐵道學院學報, 1999(02).
[2]李力行, 何衛東, 王秀琦, 等. 機器人用高精度RV傳動的研究[J]. 大連鐵道學院學報, 1999(02).
[3]董向陽, 鄧建一, 陳建平. RV傳動機構的受力分析[J].上海交通大學學報, 1996(05).
[4]張鐵, 謝存禧, 歐陽惠芳. 影響短幅擺線行星減速器回差的因素[J]. 華南理工大學學報(自然科學版),1999(02).
[5]劉繼巖, 崔正昀, 孫濤. RV減速器傳動精度的研究綜述[J],天津職業技術師范學院學報, 1998(02).
1~4月我國船舶工業經濟運行情況 2
造船企業三大指標兩升一降。1~4月份,54家重點監測的造船企業造船完工999萬載重噸,同比下降14%;承接新船訂單2937萬載重噸,同比增長174%;4月底,手持船舶訂單1.4702億載重噸,同比增長56.3%。
工業總產值同比增長。1~4月份,船舶行業87家重點監測企業完成工業總產值1168億元,同比增長8.6%。其中,船舶制造企業566億元,同比增長6.8%;船舶配套企業91億元,同比增長7.2%;船舶修理企業39億元,同比增長14.1%。
船舶出口同比增長。1~4月份,船舶行業87家重點監測企業完成出口產值478億元,同比增長1.2%。其中,船舶制造企業330億元,同比增長2.1%;船舶配套企業13億元,同比下降21%;船舶修理企業19.3億元,同比增長10.1%。
企業經濟效益同比止跌回升。船舶行業87家重點監測企業實現主營業務收入832億元,同比增長20%;利潤總額22億元,同比增長5.7%。
Modification of Cycloid Profile in RV320 Industrial Robot Reducer
ZHAO Zheng
(Tianjin Speed Reducer Co., Ltd,Tianjin 300000, China)
RV320 reducer is specially used as industrial robots reducer. High bearing capacity, small return difference and small volume etc. are required. The cycloid structure of mechanical structure can meet the requirements. The cycloid gear of the general structure uses standard profile, which has big clearance and return difference. They shall be improved when applied. After the analysis of modification of cycloid profile, it is concluded that the modification parameters can form more tooth. And clearance is formed between the valley of tooth, which forms oil film lubrication. Return difference is also narrowed. Tests show that it can meet the needs of the high precision gear reducer.
RV reducer; cycloid gear; equidistant modification; shift modification
TH132
A
國家863計劃項目,“工業機器人高精度高效率減速器開發”課題(課題編號:2011AA04A102)
趙錚(1983-),男,中級工程師。主要從事高精度擺線、齒輪減速機的研發。
猜你喜歡
城市道橋與防洪(2022年4期)2022-07-01 06:04:12
當代陜西(2019年8期)2019-05-09 02:22:48
上海建材(2019年1期)2019-04-25 06:30:48
動漫星空(興趣百科)(2019年3期)2019-03-07 07:23:10
家庭影院技術(2018年4期)2018-05-09 07:07:52
專用汽車(2016年4期)2016-03-01 04:13:43
質量與標準化(2015年9期)2015-12-31 11:41:40
中國質量與標準導報(2014年4期)2014-03-11 19:54:25
中國質量與標準導報(2014年10期)2014-02-28 22:25:47
中國質量與標準導報(2014年7期)2014-02-28 22:24:39
