基于ANSYS Workbench取物機器人的有限元靜態分析
2014-10-12 08:52:12牛曉蓉李衛國全曉飛閆秀芳喬秀蕓
機械工程師 2014年3期
牛曉蓉,李衛國,全曉飛,閆秀芳,喬秀蕓
(內蒙古工業大學機械學院,呼和浩特 010051)
0 引言
工業機器人作為生產自動化設備,已經在現代制造業中發揮著巨大的作用。但是近年來隨著科學技術的發展,機器人已遠遠超出了服務制造業的范圍,被廣泛地應用于非制造業領域,在人類生活應用中不斷地擴大。特種機器人技術主要是指非制造業中的各種先進機器人及其相關技術[1],特種機器人是替代人類在危險、惡劣環境下作業必不可少的工具。在不適宜人類的工作環境中或者對于不方便拿取、搬運物品的老年人及殘疾人,取物機器人可以幫助人們完成抓取、轉移物品的工作。本文新設計一種取物機器人,以其整體機械結構為研究對象,利用Pro/E軟件和ANSYS Workbench軟件,對于處于危險姿態下的機器人進行了有限元靜態分析,以獲得其薄弱環節,為取物機器人的進一步優化設計提供理論數據。
1 機器人的機械機構設計方案
本文所研究的取物機器人設計目的是用于抓取、轉移物品的取物機器人。機械結構主要由底盤、平行架、夾手、套筒、伸縮臂、支架等組成,其結構如圖1所示。
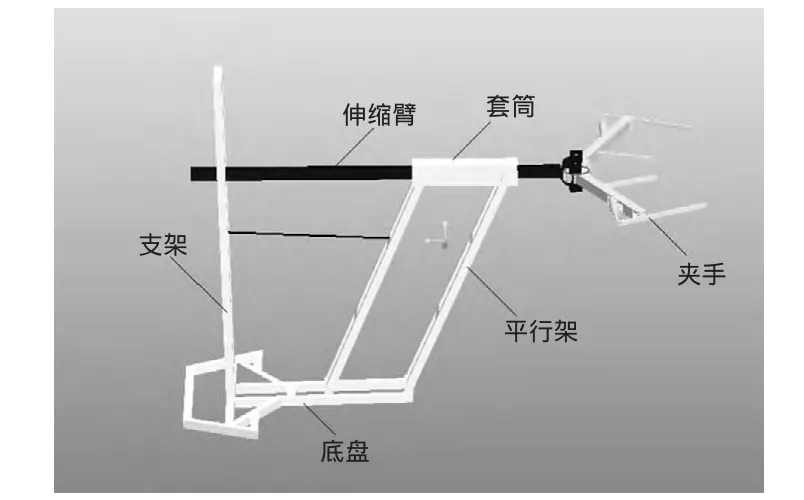
圖1 取物機器人機械結構
由圖1可見,機器人的支架與底盤是焊接連接,平行架下端與底盤鉸接,伸縮臂與套筒連接,套筒則與平行架鉸接。套筒、平行架和底盤構成了一個平行四邊形,利用平行四邊形中連桿與機架始終平行的特點,可以保證在運動過程中被抓取物體的平穩。另外,伸縮臂與套筒之間可相對運動實現夾手伸縮量的微調。支架與平行架之間由鋼絲繩連接,通過固定在支架上的電動機帶動鋼絲繩拉動平行架收回直立。機器人夾取物品的受力情況與機器人未夾取物品的受力情況不同,為了確保安全及放置物品位置的準確性,需要研究機器人夾取物品后機器人整體的應力、應變和位移情況,找出薄弱環節,為機器人的進一步優化設計提供理論數據。
2 有限元模型的建立
有限元分析是為了檢驗機器人的機械結構設計是否滿足強度及剛度要求,暫時不考慮機器人的控制,因此只對機器人進行有限元靜態分析。
把Pro/E與ANSYS結合使用,利用Pro/E建模快速、準確建模的特長,可以解決ANSYS建模能力不足的問題。首先利用Pro/E軟件建立了機器人的機械結構三維實體模型;然后通過軟件之間的數據交換接口將三維實體模型導入到ANSYS Workbench中。
在ANSYS Workbench軟件進行分析時,必須對模型進行必要的簡化,簡化成可以分析的模型。因為三維實體模型包含的零部件較多,比較復雜。如果零件不經簡化就全部直接導入ANSYS Workbench中進行計算,會增加計算機的計算量并影響計算精度。在保證模型的結構整體質量以及質量分布的前提下,以及在綜合考慮機器人機械結構的幾何特性與力學性能之后,對整體影響不明顯的倒角、圓角、工藝孔等結構進行簡化。另外,與銷軸采用過盈配合的零件,在ANSYS Workbench中進行form a new part處理,使其成為一個整體部件;采用螺紋進行固定連接的零件同樣進行form a new part處理。除此之外,由于夾手部分包含多個氣缸,結構較為復雜,如果將夾手導入有限元進行計算,夾手的有限元模型的網格劃分將會變得非常復雜,并且延長計算機的運算時間和影響計算精度,因此,用遠端載荷代替夾手的自重和物體重力,這個力將作用于夾手與伸縮臂的連接處。簡化后的模型如圖2所示。
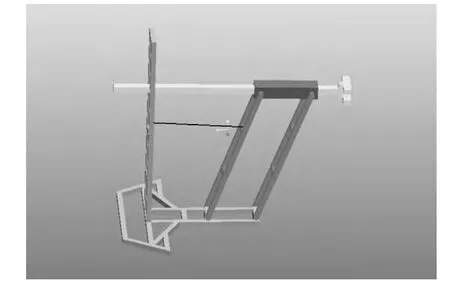
圖2 取物機器人簡化后模型
在ANSYS Workbench中進行有限元分析之前,首先需要選定材料。機器人的底盤、支架和伸縮臂等均采用鋁合金材料,其材料屬性如表1所示。選擇這樣的材料因為密度小,且可根據實際需要調整在上面安裝的機構的位置。
根據前面對機器人機械結構的介紹可知,在進行靜態分析之前需要在底盤上添加固定約束模擬機器人不行走時的情況。用彈簧代替鋼絲繩以實現對平行架的拉動作用。另外,對于其他相對運動關系的關節,根據實際情況均采用Revolute連接。網格的劃分對有限元靜態分析來說是一項很重要的工作,將對分析結果產生重要的影響。機器人的有限元網格劃分的最終效果如圖3所示,共計7527單元,39162節點。
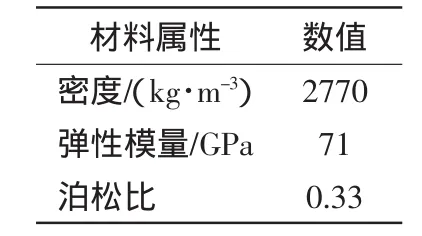
表1 機器人材料屬性
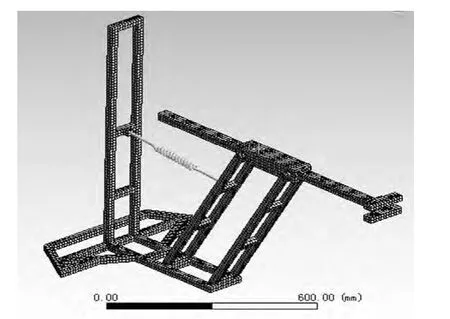
圖3 機器人有限元網格劃分圖
當機器人的平行架前傾到最遠的位置且伸縮臂向前伸至最遠時,機器人處于最危險的姿態,如圖4所示。因此選擇研究該姿態在重力、負載作用下的應力、應變和位移情況,進而找到機器人的薄弱環節。
3 有限元靜態分析結果
利用ANSYS Workbench計算得到處于危險姿態時機器人的應力、應變和位移云圖如圖5~圖7所示。
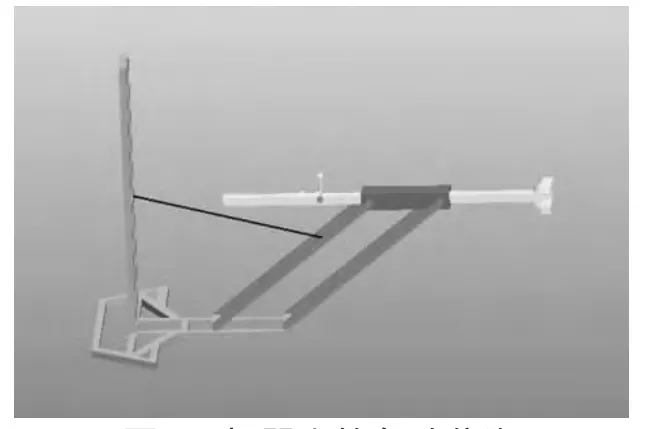
圖4 機器人的危險位姿

圖5 機器人的應力圖
由圖5、圖6可以看出,最大應力、變形發生在伸縮臂與套筒前端的連接處,最大節點等效變形為3.5858E-5 mm,最大節點等效應力為2.5154 MPa,遠遠小于材料的屈服極限 120 MPa,強度滿足設計要求。同時也可以確定伸縮臂與套筒前段的連接處是薄弱環節,需要進一步的優化和改進。由圖7可以看出,取物機器人處于危險姿態,并且在伸縮臂前端施加10 N的力后,最大位移發生在伸縮臂的前端,其值為0.1224 mm,經過試驗驗證,該值滿足設計要求。
4 結論
在確定取物機器人的設計方案后,利用Pro/E軟件對取物機器人機械結構進行了實體建模,并且通過ANSYS Workbench軟件對其進行了有限元靜態分析,得到了機器人的應力、應變和位移圖,分析結果表明,在研究過程中所設計的強度與剛度都滿足了設計要求,并找到了薄弱環節,為機器人的進一步優化和改進提供了理論依據。此次設計的取物機器人可以用在不適宜人類的工作環境中,或者幫助不方便拿取、搬運物品的老年人及殘疾人完成拿取、轉移物品的工作。特種機器人在農業、食品加工、建筑、醫療、服務和娛樂等領域發揮著重要的作用,具有著廣闊的市場前景。取物機器人的研究也會為人們的生活提供方便與快捷,對人類社會的發展產生影響。

圖6 機器人的應變圖

圖7 機器人的位移圖
[1]王樹國,付宜利.我國特種機器人發展戰略思考[J].自動化學報,2002,28(增刊 1):70-76.
[2]曾攀.有限元分析及應用[M].北京:清華大學出版社,2004.
[3]馬睿,胡曉兵,萬曉東.基于ANSYS的小型機器人小臂的有限元靜態分析[J].機械設計與制造,2012(9):4-6.
[4]楊志敏,周健,李立君,等.基于ANSYS Workbench的采摘機器人臂架模態分析[J].農機化研究,2013(12):56-58.
[5]高耀東,李強,張寶玉,等.ANSYS機械工程應用精華60例[M].北京:電子工業出版社,2012.
猜你喜歡
哲學評論(2021年2期)2021-08-22 01:53:34
當代工人(2020年8期)2020-05-25 09:07:38
中華詩詞(2019年7期)2019-11-25 01:43:04
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
科技知識動漫(2016年8期)2016-07-29 20:40:09
兒童故事畫報·發現號趣味百科(2015年12期)2016-01-25 00:41:49
現代企業(2015年9期)2015-02-28 18:56:50
機械工程師(2015年10期)2015-02-02 01:14:03
機電產品開發與創新(2014年4期)2014-03-11 16:42:24